Exemples d’application
Pour réduire le temps nécessaire à la création de modèles de corps convexes et garantir que la détection des collisions soit efficace, sûre et précise, vous pouvez simplifier le modèle original en vous basant sur les principes suivants:
-
Avant de créer un modèle convexe, évaluez le modèle afin de préciser la fonction de chaque partie, puis procédez à la construction de l’enveloppe convexe pour chaque structure.
-
Pour assurer une détection des collisions efficace, lors de la création du modèle d’enveloppe convexe, les parties qui entrent en contact avec l’objet cible ou sont sujettes aux collisions doivent être soigneusement conçues pour correspondre le plus fidèlement possible à la structure réelle de l’objet. Les parties du modèle d’enveloppe convexe qui n’entrent pas en contact avec l’objet cible et ne sont pas reliées au robot (par exemple, les caméras, capteurs, connecteurs, etc.) peuvent être modélisées de manière approximative, l’enveloppe convexe étant légèrement plus grande que l’objet réel.
-
Dans l’espace 3D, une enveloppe convexe est le plus petit polyèdre convexe qui englobe complètement un ensemble de points, sa frontière étant formée par les points les plus externes de l’ensemble. Si trop de points de bord sont sélectionnés, l’enveloppe convexe obtenue peut être excessivement grande; si trop peu sont sélectionnés, l’enveloppe convexe peut être incomplète. Ajustez la plage de sélection selon les besoins afin de générer une enveloppe convexe de taille appropriée.
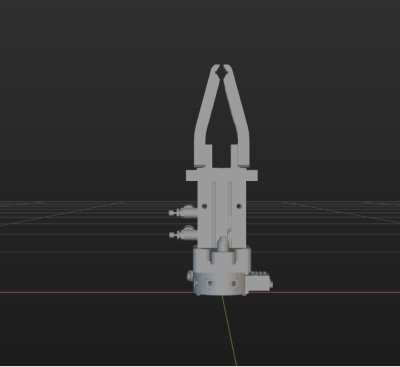
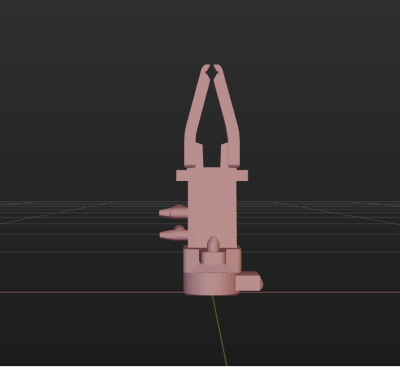
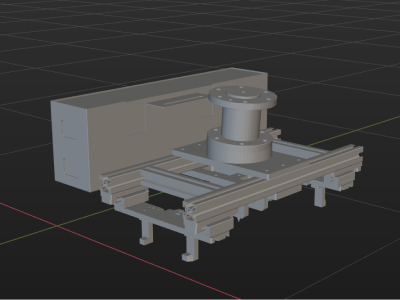
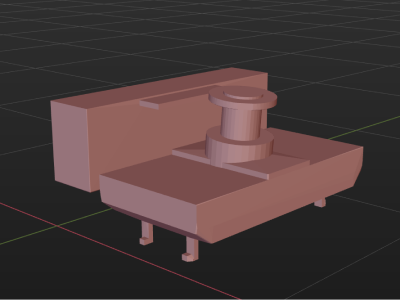
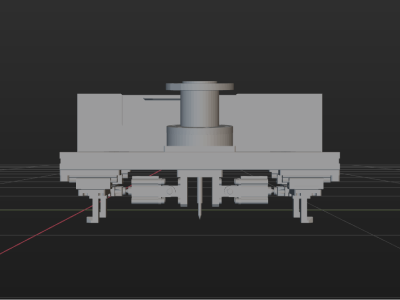
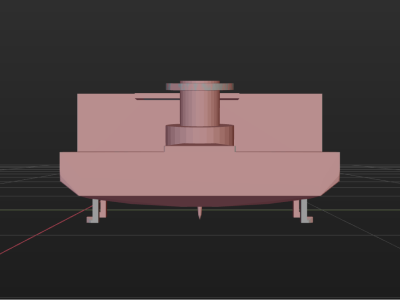
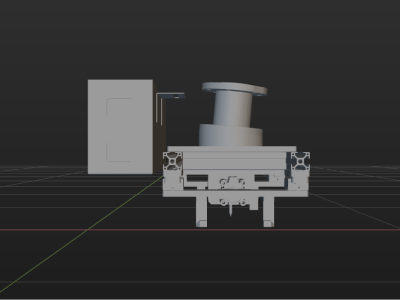
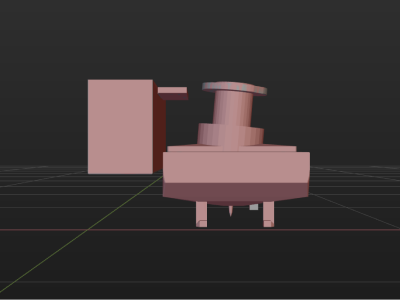
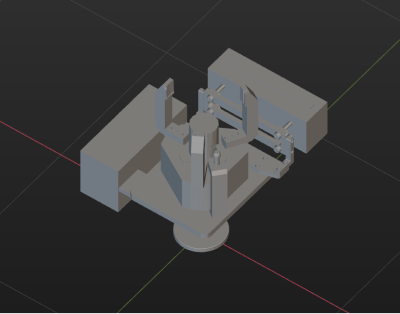
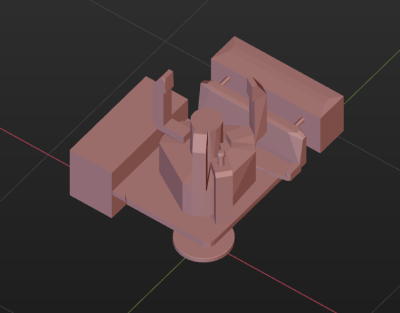
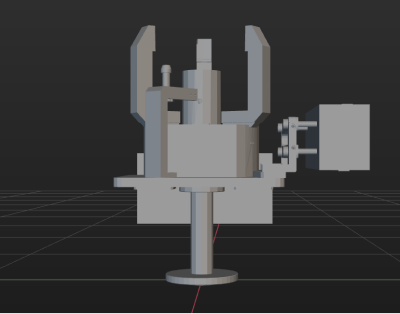
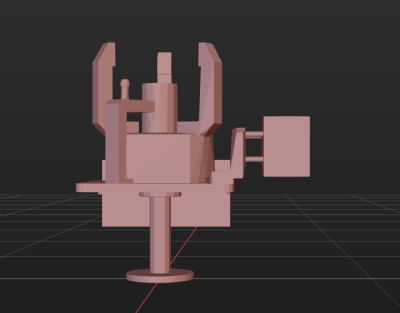
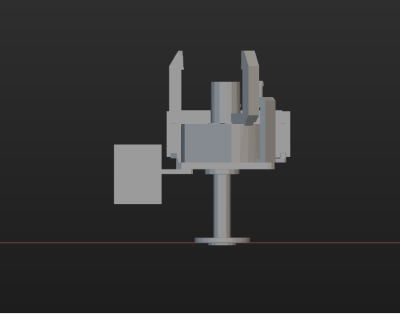
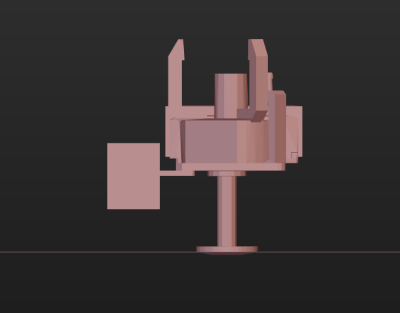
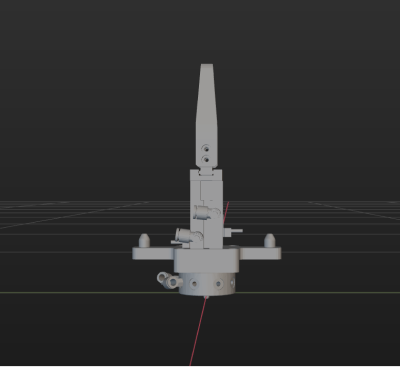
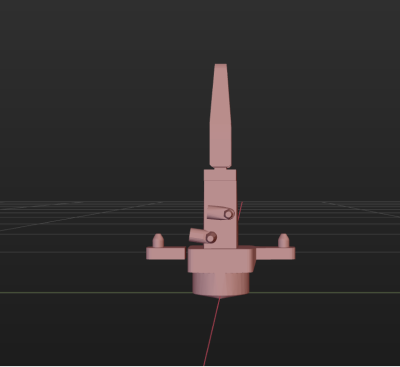
Veuillez vous référer aux exemples ci-dessous, qui illustrent les modèles d’outils d’extrémité avant et après qu’ils ont été englobés par des enveloppes convexes.
-
Exemple 1:
Vue Avant Après Vue personnalisée
Vue de face
Vue latérale
-
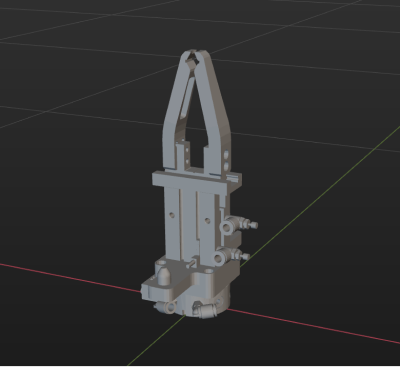
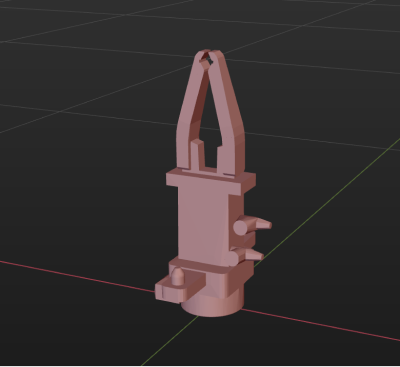
Exemple 2:
Vue Avant Après Vue personnalisée
Vue de face
Vue latérale
-
Exemple 3:
Vue Avant Après Vue personnalisée
Vue de face
Vue latérale