Pose
Ce sujet présente les concepts de base et les types courants de poses utilisés en reconnaissance visuelle robotique, en planification de trajectoire et en commande de mouvement.
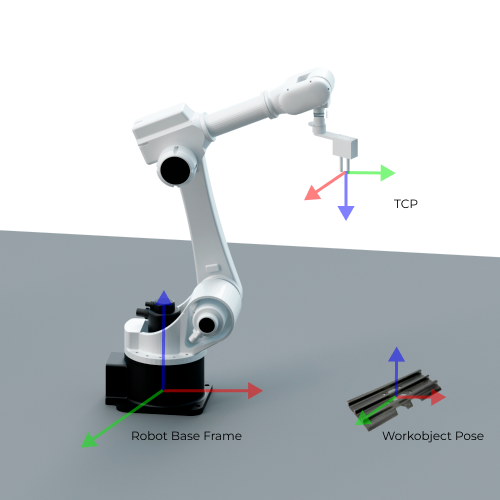
Une pose représente à la fois la position et l’orientation d’un objet dans l’espace 3D. Elle décrit la relation spatiale entre un repère de référence (tel qu’un repère outil ou celui de l’objet cible) et un autre repère (tel que le repère du robot ou celui de la caméra). Une pose comporte généralement six composantes : X, Y, Z, Rx, Ry, Rz, correspondant à la position 3D et aux rotations autour de chaque axe de coordonnées.
Pose de l’objet cible
La pose de l’objet cible est la pose d’un certain point de l’objet cible par rapport au repère de base du robot. Lors du placement de l’objet cible, nous faisons généralement coïncider sa pose avec une pose cible donnée.
La pose de l’objet cible est couramment utilisée lors de la détection 3D et de la planification de préhension. Le système de vision fournit la pose de l’objet cible dans le repère de la caméra. Sur la base du résultat de la calibration main-œil, cette pose est transformée dans le repère du robot pour déterminer le point de préhension ou le point d’assemblage dans l’espace 3D.
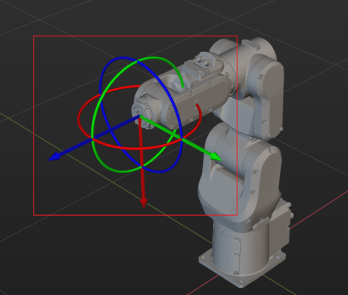
Pose du robot
La pose du robot décrit la position et l’orientation du robot dans l’espace 3D. Elle est généralement représentée soit via le TCP, soit par les positions articulaires.
Pose de l’outil
La pose de l’outil décrit la pose du repère outil par rapport au repère du robot. Elle précise la position (x, y, z) de l’outil et son orientation (souvent représentée à l’aide d’angles d’Euler, d’une matrice de rotation ou d’un quaternion).
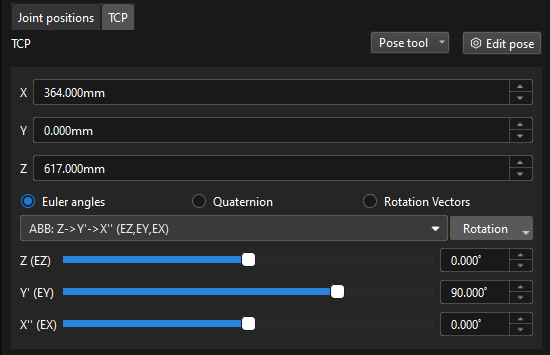
Le point de référence de la pose de l’outil est le TCP (Point central de l’outil), qui est l’origine du repère outil. Le TCP est un point de référence défini sur l’outil ou de manière externe, utilisé pour représenter la position et l’orientation de l’outil dans l’espace. Sa pose est définie par rapport à la bride du robot et est généralement placée à un emplacement clé sur l’outil, comme le centre d’une ventouse, le point de préhension d’une pince, ou l’extrémité d’une torche de soudage. Lorsque le robot effectue des tâches telles que la préhension, la soudure ou la pulvérisation, son mouvement consiste essentiellement à amener le TCP au point cible.
-
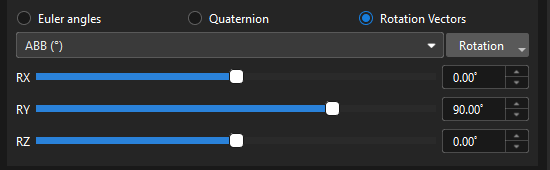
Angles d’Euler
Les angles d’Euler sont utilisés pour décrire la rotation de l’objet dans l’espace 3D.
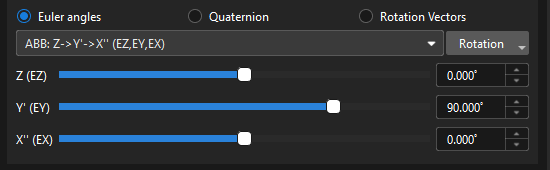
Les angles d’Euler se composent de trois angles correspondant à la rotation de chacun des trois axes. Ces trois axes tournent généralement autour des axes X, Y et Z du repère fixe de l’objet, respectivement. La même orientation peut être exprimée de différentes manières à l’aide de multiples jeux d’angles d’Euler. Pour éviter toute ambiguïté, une définition cohérente des angles d’Euler est appliquée aux robots de différentes marques. Pour plus d’informations sur les conventions et les représentations des angles d’Euler, veuillez vous reporter à Angles d’Euler.


-
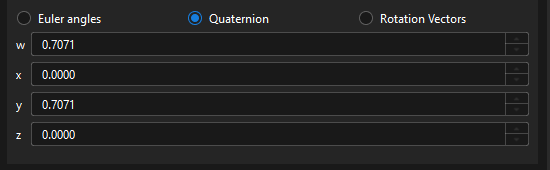
Quaternions
Pour éviter le problème de verrouillage de cardan associé à l’utilisation des angles d’Euler, certains fabricants de robots utilisent des quaternions pour représenter les orientations dans l’espace. Un quaternion consiste grossièrement à utiliser trois nombres pour définir l’axe de rotation spatial et un quatrième nombre pour définir l’angle de rotation. Le repère de l’outil peut atteindre la pose cible depuis son état initial en tournant d’un angle autour de l’axe de rotation spatial.
-
Vecteur de rotation
Le vecteur de rotation, également appelé angle axial, est utilisé pour décrire l’état de rotation de l’outil.
Actuellement, il n’est utilisé que par les robots UR.
La pose de l’outil est un paramètre central tant pour la planification de trajectoire que pour la préhension. Aux points de passage, aux points cibles, ou lors de l’enseignement manuel, la pose que vous saisissez et ajustez est la pose de l’outil. Le robot suit ensuite cette pose, en exécutant des mouvements linéaires ou articulaires pour réaliser des opérations de préhension, de dépose ou d’autres tâches.
Positions articulaires (JPs)
Les positions articulaires correspondent aux angles de rotation de chaque joint du robot par rapport à sa position initiale ou de référence. Cette description peut représenter l’état de chaque joint en adéquation avec la structure matérielle du robot.
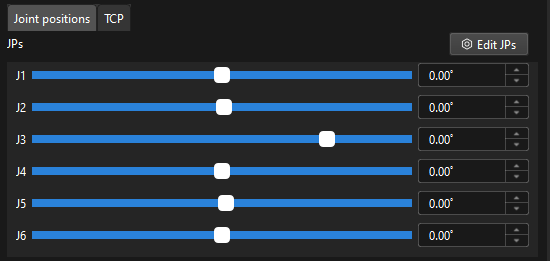
Les positions articulaires sont mappées à la pose de l’outil par un calcul de cinématique directe, tandis que la pose de l’outil est mappée aux positions articulaires par un calcul de cinématique inverse.
En pratique, les positions articulaires sont couramment utilisées pour les calculs de cinématique directe, la vérification de la cinématique inverse et la reproduction des poses du robot. En simulation hors ligne, Mech-Viz détermine à chaque instant la pose du robot sur la base des positions articulaires. Lors de la communication, si le robot prend en charge la réception de données JPs, Mech-Viz peut envoyer directement les positions articulaires planifiées, garantissant que la trajectoire de mouvement exécutée correspond exactement à celle simulée.
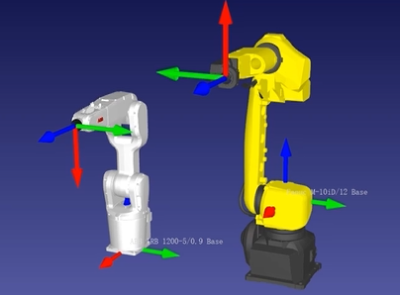
Pose de la bride
La pose de la bride est la pose du repère de bride du robot par rapport au repère de référence du robot, dont la représentation est la même que celle de la pose de l’outil. Elle peut être considérée comme une pose d’outil particulière où le TCP est au centre de la bride sans aucune rotation.
L’orientation par défaut du repère de bride définie par chaque fabricant de robots est différente, ce qui entraîne des angles par défaut différents pour la pose de la bride. Par exemple, l’orientation par défaut de l’axe X pour les robots ABB est vers le bas, tandis que pour les robots FANUC elle est vers le haut. De plus, la plupart des robots ont une pose de bride avec l’axe Z perpendiculaire à la surface de la bride et orienté vers l’extérieur, mais pour les robots TURIN, c’est l’axe X qui est perpendiculaire à la surface de la bride et orienté vers l’extérieur.
La pose de la bride est principalement utilisée pour la calibration main-œil, l’installation de l’outil et la vérification de la pose. Lors de la calibration main-œil, la pose de la bride peut être utilisée avec la pose de la mire de calibration dans le repère de la caméra pour calculer la transformation extrinsèque. Elle est également couramment utilisée comme référence lors du changement d’outil ou de la vérification des décalages du TCP.