Calculer les poses et les dimensions à partir de nuages de points planaires
Fonction
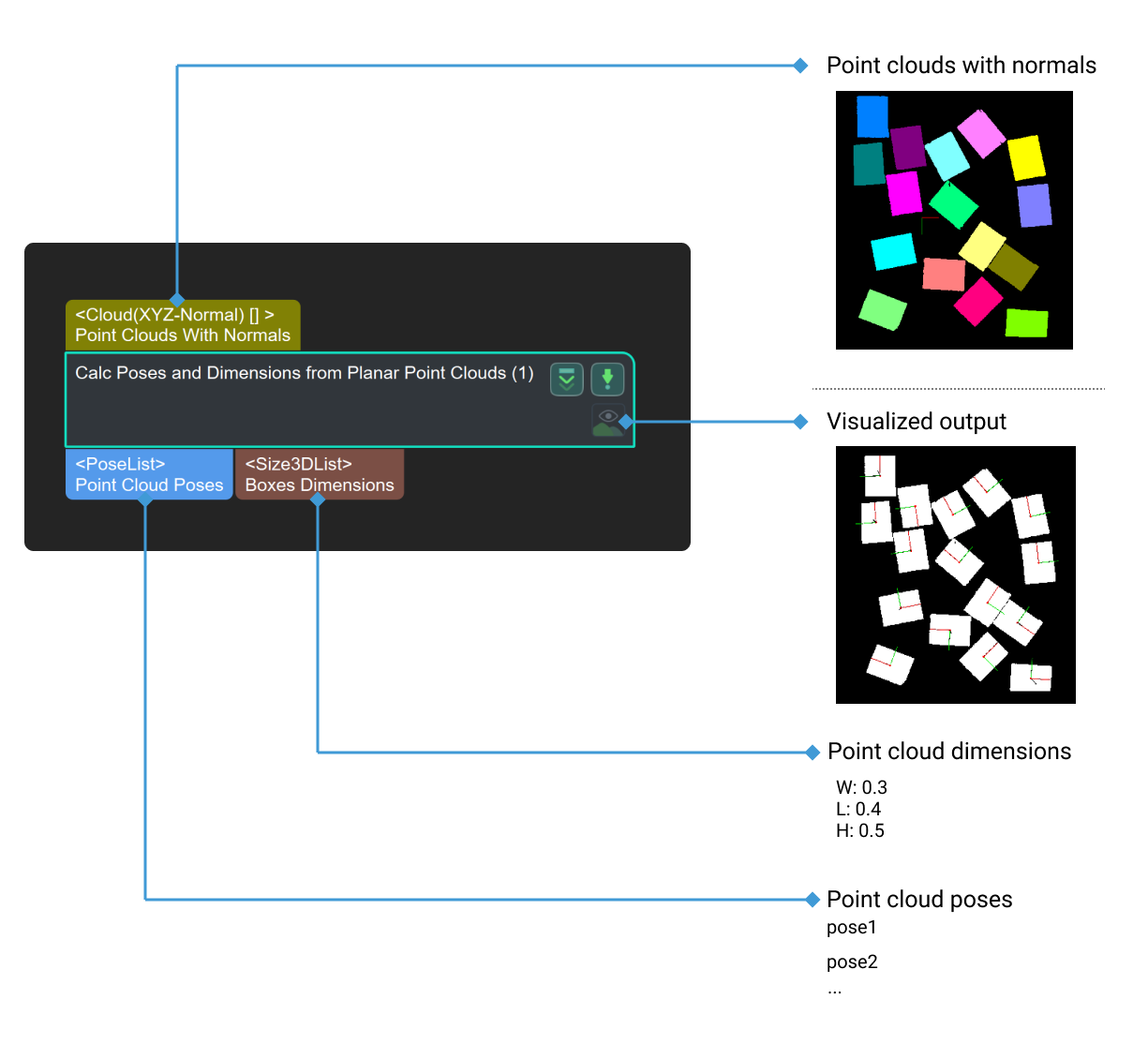
Cette étape calcule les poses de nuages de points planaires et les dimensions des boîtes englobantes des nuages de points.
Scénario d’utilisation
Cette étape est généralement utilisée pour calculer les points de préhension et les dimensions de nuages de points planaires d’objets tels que des cartons et des sacs.
|
Avant d’utiliser cette étape, veuillez filtrer et regrouper en clusters le nuage de points afin de réduire les interférences dues aux points indésirables. |
Description des paramètres
Paramètres de calcul de la pose
|
La Méthode pour calculer le centre de la pose sélectionnée doit correspondre à la Méthode pour calculer l’orientation de la pose.
|
- Méthode pour calculer le centre de la pose
-
Description: Ce paramètre spécifie le centre où se situe la position de la pose.
Liste des valeurs:
-
CloudCenter (centre du nuage de points): Sélectionnez cette méthode lorsque les nuages de points de l’objet sont dispersés de manière aléatoire, comme illustré sur la figure de gauche ci-dessous. BoundingRectCenter (centre de la boîte englobante du nuage de points): Sélectionnez cette méthode lorsque les nuages de points de l’objet sont uniformément répartis, comme illustré sur la figure de droite ci-dessous.
-
CloudCenter (centre du nuage de points): Sélectionnez cette méthode lorsque les nuages de points de l’objet sont dispersés de manière aléatoire, comme illustré sur la figure de gauche ci-dessous.

Recommandation de réglage: Veuillez définir le paramètre selon le besoin réel.
-
- Méthode pour calculer l’orientation de la pose
-
Description: Ce paramètre spécifie l’orientation de la pose.
Liste des valeurs:
-
BoundingRectOrientation (orientation du centre de la boîte englobante): Sélectionnez cette méthode lorsque les nuages de points de l’objet sont uniformément répartis, comme illustré sur la figure de droite ci-dessus.
-
CloudOrientation (orientation du centre du nuage de points): Sélectionnez cette méthode lorsque les nuages de points de l’objet sont dispersés de manière aléatoire, comme illustré sur la figure de gauche ci-dessus.
Recommandation de réglage: Veuillez définir le paramètre selon le besoin réel.
-
- Utiliser le rectangle le mieux aligné
-
Description: Ce paramètre détermine s’il faut utiliser un rectangle englobant dont les arêtes sont aussi parallèles que possible à celles de l’objet. Si cette option n’est PAS sélectionnée, un rectangle englobant minimal sera utilisé.
Valeur par défaut: Non sélectionné.
Recommandation de réglage: Veuillez définir le paramètre selon le besoin réel.
- Rayon de recherche d’alignement
-
Description: Ce paramètre détermine si le rectangle englobant s’aligne avec les points caractéristiques de l’objet. L’unité est le pixel. Lorsque la distance entre le point caractéristique et le rectangle englobant est inférieure à la valeur, les points caractéristiques sont considérés comme alignés avec le rectangle englobant.
Valeur par défaut: 3 px
Ce paramètre n’apparaît qu’après avoir sélectionné Utiliser le rectangle le mieux aligné.
Paramètres de calcul de la pose des cartons
|
Ce groupe de paramètres s’applique uniquement aux cartons. |
- Calculer la hauteur des cartons
-
Description: Ce paramètre est utilisé pour calculer la hauteur du carton dans la direction Z.
Valeur par défaut: Non sélectionné.
Recommandation de réglage: Veuillez sélectionner ce paramètre lorsque vous devez calculer la hauteur du carton dans la direction Z.
- Hauteur fixe pour le fond du carton
-
Description: Ce paramètre spécifie la hauteur de la base du carton, telle que le convoyeur et la palette sur lesquels le carton est posé, afin de faciliter le calcul de la hauteur du carton dans la direction Z.
Valeur par défaut: 0.000 mm
Recommandation de réglage: Veuillez définir le paramètre selon le besoin réel.
Ce paramètre n’apparaît qu’après avoir sélectionné Calculer la hauteur des cartons.