En ligne
Paramètres de palette
Largeur de l’écart
La largeur de l’écart (mm) entre les cartons. Valeur recommandée : 10 ~ 20 mm.
Définir une largeur d’écart minimale permet d’éviter les collisions lorsque les cartons sont empilés serrés. Les causes fréquentes de collisions incluent des dimensions ou des poses inexactes des cartons reconnus.
Coin prioritaire
Ce paramètre spécifie le coin de la palette sur lequel les cartons sont palettisés en premier.
| Paramètre | Description | Illustration |
|---|---|---|
OO |
Lorsque la palette est en position initiale, le coin de palette situé dans le troisième quadrant, observé en vue de dessus. |
|
OY |
Par rapport à OO, le coin de palette dans la direction Y positive du repère du robot. |
|
XY |
Le coin obtenu en effectuant une translation du coin OO de la palette le long des axes X et Y positifs du repère du robot. |
|
XO |
Par rapport à OO, le coin de palette dans la direction X positive du repère du robot. |
|
Placement par lâcher
Activer le lâcher
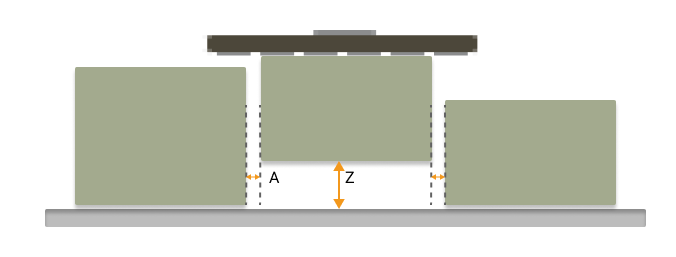
Une fois cette option sélectionnée, lorsque le carton tenu se trouve à une certaine distance de la position de pose selon l’axe Z, il peut être lâché directement.
Lorsqu’un carton plus court est placé entre deux plus hauts ou lorsque les cartons s’ajustent étroitement, le carton peut être posé par lâcher afin de minimiser le risque de collision.
Hauteur de lâcher |
Distance (mm) selon l’axe Z à laquelle l’objet sera lâché. |
Marge de sécurité de lâcher |
Distance minimale entre le côté du carton à poser et ses cartons adjacents. Unité : mm. |
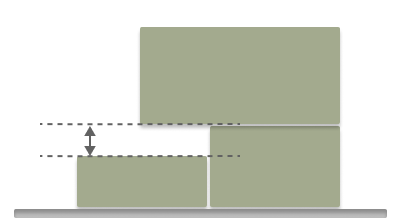
Dans la figure ci-dessous, Z désigne la hauteur de lâcher, et A désigne la marge de sécurité de lâcher.
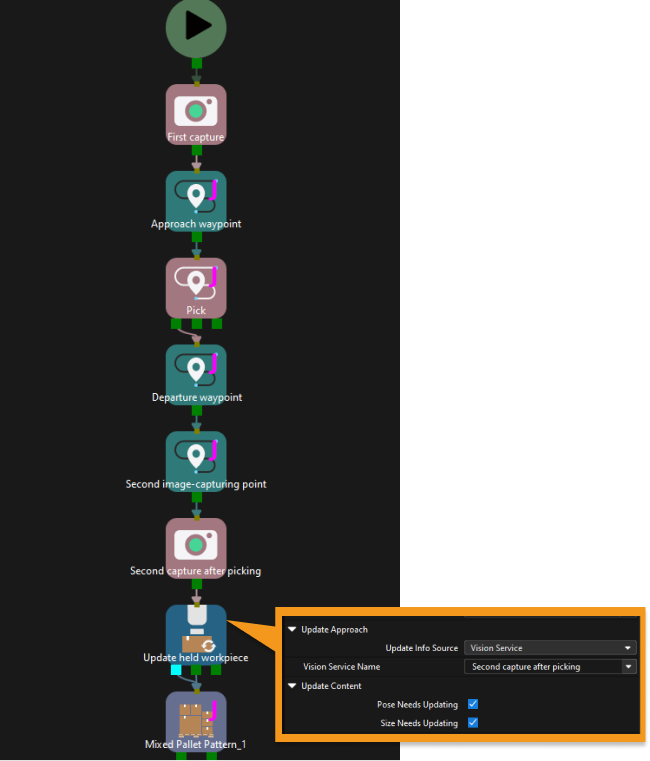
Capturer deux fois pour mettre à jour la taille du carton
Non sélectionné par défaut. Sélectionnez ce paramètre lorsque le champ de vision de la caméra n’est pas suffisamment large pour capturer toutes les informations de la scène en une fois et qu’une seconde image est nécessaire pour la fusion de scène.
Si le carton a été saisi par l’étape « Déplacement par vision » et que la hauteur du carton ne peut pas être déterminée, la hauteur du carton sera estimée lorsque l’étape « Palettisation de caisses mixtes » calcule la position de pose et la pondération correspondante, et le logiciel peut planifier sur la base de la hauteur estimée. Après avoir capturé une seconde fois la hauteur du carton, l’étape « Palettisation de caisses mixtes » effectue une planification secondaire sur la base des dimensions réelles du carton reconnues par le système de vision.
| Cette fonctionnalité doit être utilisée conjointement avec l’étape « Mettre à jour l’objet cible tenu ». |
Comme illustré sur la figure ci-dessous, le robot amène le carton à un point de capture d’image pour le photographier une seconde fois, et la pose ainsi que les dimensions du carton seront mises à jour par l’étape « Mettre à jour l’objet cible tenu ».
Limite de candidats
Nombre limite de candidats
Ce paramètre est utilisé pour limiter le nombre total de positions de pose de carton essayées, afin d’accélérer la planification de trajectoire ultérieure. Par exemple, s’il y a 20 positions disponibles que le robot peut essayer et qu’aucune ne s’avère réalisable, 20 planifications seront effectuées jusqu’à ce qu’il s’arrête, sans aucune limite imposée. Si le nombre limite est défini à 5, le robot peut s’arrêter après 5 planifications, réduisant efficacement le temps de planification. En réduisant de manière appropriée la valeur de ce paramètre, l’efficacité de la planification peut être améliorée tout en garantissant la précision de la planification.
Lorsque ce paramètre est réglé sur -1, cela signifie qu’il n’y a aucune limite au nombre de positions candidates.
Cartons avec étiquettes
Étiquette en bordure
Non sélectionné par défaut. Cette fonctionnalité ne sera pas utilisée.
Cette fonctionnalité s’applique aux scénarios où des étiquettes sont apposées sur les côtés des cartons et doivent être exposées à l’extérieur de la pile.
| Lorsque la palette est suffisamment grande et que ce paramètre est sélectionné, il peut n’y avoir qu’un seul anneau de cartons empilés le long du bord de la palette, et l’espace central de la palette peut rester inoccupé. |
Rechercher des positions candidates
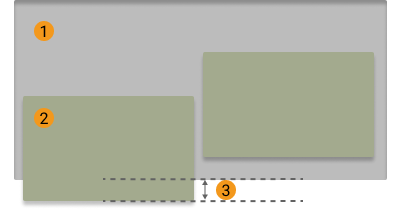
Dépassement autorisé
La largeur autorisée permettant aux cartons de dépasser le bord de la palette. Valeur recommandée : 20 ~ 50 mm.
Vue de dessus |
||
|
||
1 : Palette |
2 : Carton |
3. Distance de dépassement des cartons au-delà du bord de la palette |
Rapport de dépassement du carton
Ce paramètre détermine la longueur maximale autorisée du carton supérieur au-delà du plan contre lequel il est appuyé.
Vue latérale |
|
|
|
1 : Longueur du carton supérieur |
2 : Longueur du carton supérieur dépassant le carton inférieur |
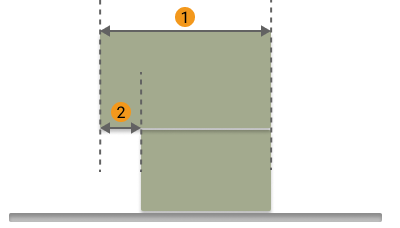
Rapport de dépassement du carton = ②/①
Différence de hauteur de couche
Lorsque les dimensions des cartons de la couche supérieure sont plus grandes que celles des cartons placés sur la couche inférieure, le carton plus grand est autorisé à être posé sur un plan présentant une différence de hauteur inférieure à la valeur de ce paramètre.
Vue latérale |
|
Taux d’échantillonnage
Taux d’échantillonnage lors de la planification de la position du carton. Valeurs recommandées : 200, 500, 1000. Plus le taux d’échantillonnage est élevé, plus le schéma de palettisation est précis, mais plus la vitesse de calcul est lente.
Angle libre du coin
Angle, en vue de dessus, entre la trajectoire d’entrée du carton et le côté d’un carton adjacent.
Vue de dessus |
|
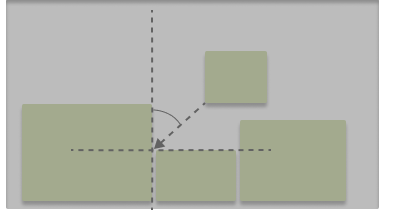
Si la valeur définie est trop grande, une zone vide en forme de U peut rester après la palettisation. Si la valeur est trop petite, des collisions avec les cartons adjacents peuvent se produire.
Valeur recommandée : 15°~30°.
Activer le point médian
Une fois cette option activée, le point médian de la ligne reliant les coins du carton sera utilisé pour déterminer la direction du segment d’ajustement. À ce moment-là, la projection du segment d’ajustement sur le plan horizontal sera parallèle au bord du carton adjacent. Lorsqu’une cavité se forme dans la pile, les cartons peuvent être insérés verticalement dans la cavité.
Rayon de sécurité
Lorsqu’on détermine un coin spécifique comme direction d’entrée, vérifier la présence d’obstacles dans un cercle, centré sur ce coin, de rayon spécifié par ce paramètre, dans le plan de projection XOY.
Dim Z de l’effecteur terminal
Différence de hauteur (mm) entre la surface inférieure de la pince et le bas de l’avant-dernier joint du robot dans la direction verticale.
Écart de sécurité du point médian
Lorsque le carton est inséré dans les positions candidates déterminées par le point médian, largeur minimale (mm) de l’écart entre les cartons adjacents.
Lors de la pose du carton, la largeur de l’écart entre le carton tenu et le carton adjacent doit être supérieure à cette valeur. À condition qu’aucune collision ne se produise, définir l'« Écart de sécurité du point médian » à une valeur inférieure à la « Largeur de l’écart » peut rendre le schéma de palettisation plus compact.
Pondérations de score
Les paramètres de ce groupe sont des pondérations de score qui déterminent conjointement la position sur la palette où le carton sera posé.
Poids de la zone adjacente
Plus la valeur est grande, plus les positions candidates où la zone latérale a davantage de contact avec les cartons de la pile sont susceptibles d’être sélectionnées.
Poids de la zone de support
Plus la valeur est grande, plus les positions candidates où la surface inférieure du carton a davantage de contact avec la surface supérieure des cartons en dessous (c.-à-d. une zone de support plus grande) sont susceptibles d’être sélectionnées.
Poids de la hauteur de base
La hauteur de base est la différence de hauteur, selon l’axe Z, entre le bas du carton à palettiser et la palette. Plus la valeur de ce paramètre est grande, plus la position cible sera basse, ce qui facilite la palettisation sur un plan relativement bas.
Poids de la distance projetée au coin
Plus la valeur est grande, plus les positions dont la distance projetée sur la diagonale de la palette vers le coin prioritaire est courte sont susceptibles d’être sélectionnées.
Poids du nombre de cartons de support
Plus la valeur de ce paramètre est grande, plus le logiciel aura tendance à sélectionner des emplacements avec une surface de support inférieure plus importante. Cela produira un schéma de palettisation plus stable, mais une pile moins compacte.
Continuer la palettisation selon les informations de charge
Ce groupe de paramètres sert à poursuivre la palettisation sur des piles inachevées.
Le paramètre « Source des informations de continuation de la palettisation » comprend deux options : Service de vision ou Fichier de modèle de palette. Lorsque Service de vision est sélectionné, veuillez sélectionner un projet Mech-Vision pour reconnaître le schéma de palettisation. Lorsque Fichier de modèle de palette est sélectionné, sélectionnez le fichier JSON du schéma de palette empilée.