Cinématique des robots
Ce sujet présente les concepts de base de la cinématique des robots, y compris les types de mouvement du robot, la cinématique directe et inverse, la gestion des multiples solutions inverses, ainsi que des stratégies pour éviter les singularités. La cinématique fournit la base théorique de la planification de trajectoire du robot, du contrôle de la pose et des tâches guidées par la vision.
Type de mouvement
Le mouvement du robot désigne généralement le processus de déplacement du point central de l’outil du robot (TCP) du point A au point B dans l’espace. Le mouvement articulé et le mouvement linéaire sont deux méthodes fondamentales de mouvement du robot.
Mouvement articulé
Le mouvement articulé est le mouvement d’un robot obtenu en ajustant l’angle ou la position de chaque articulation. Chaque articulation peut tourner ou se déplacer pour amener l’outil du robot à une position attendue.
Mouvement linéaire
Le mouvement linéaire est le mouvement de l’outil du robot sur une trajectoire linéaire. Contrairement au mouvement articulé, le mouvement linéaire est obtenu en déplaçant l’outil du robot le long d’une trajectoire rectiligne.
Déplacement relatif
Le déplacement relatif est une manière de décrire le point de passage cible. Au lieu de décrire directement le point de passage cible dans l’espace, le déplacement relatif définit le point de passage cible en décrivant son décalage par rapport à un point de référence, tel que la pose TCP actuelle du robot ou un repère de référence.
Cinématique directe et inverse
La cinématique directe et inverse sont mutuellement liées : les positions articulaires sont mises en correspondance avec la pose de l’outil par le calcul de cinématique directe, tandis que la pose de l’outil est mise en correspondance avec les positions articulaires par le calcul de cinématique inverse.
Cinématique directe
La cinématique directe calcule le TCP à partir des positions articulaires connues. En substituant les positions articulaires dans les équations de configuration du robot (y compris les longueurs des maillons, les positions zéro des articulations et les sens de rotation), le TCP peut être déterminé de manière univoque.
Lorsque les commandes de mouvement du robot sont envoyées sous forme de positions articulaires (JPs), le robot suit directement ces JPs pour se déplacer. Par conséquent, la trajectoire exécutée correspond exactement à la trajectoire planifiée dans Mech-Viz.
Cinématique inverse
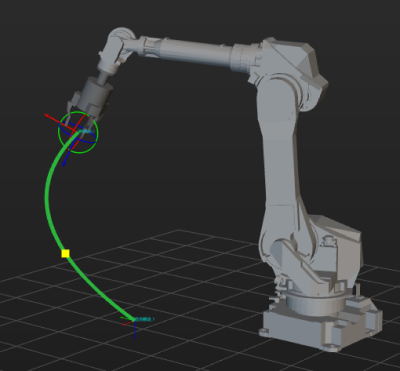
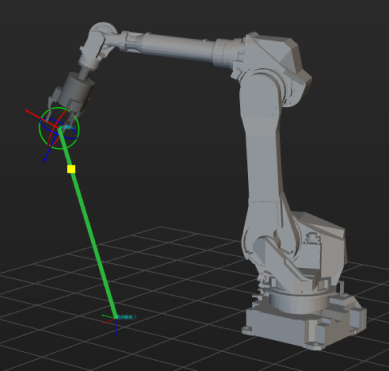
La cinématique inverse calcule les positions articulaires à partir d’un TCP donné. Comme le nombre d’inconnues est supérieur au nombre de données connues, la cinématique inverse comporte généralement plusieurs solutions, ce qui signifie que différentes combinaisons de positions articulaires peuvent produire le même TCP.
![][width=500](_images/robot-basics/inverse-kinematics.png)
Lorsque des poses d’outil sont utilisées pour la communication ou le contrôle du mouvement du robot, le contrôleur du robot doit résoudre la cinématique inverse en interne. Cela peut entraîner des différences entre la trajectoire réelle du robot et la trajectoire planifiée dans Mech-Viz, ce qui peut provoquer des écarts ou des collisions.
Cependant, la communication basée sur le TCP est encore largement utilisée pour plusieurs raisons.
-
Certains robots ne prennent pas en charge la réception de positions articulaires dans certains modes de communication.
-
Les contrôleurs de robots incluent des algorithmes de compensation intégrés, ce qui peut améliorer la précision lors de l’utilisation du TCP.
-
L’utilisation du TCP facilite le traitement secondaire dans les tâches ultérieures guidées par la vision, d’assemblage ou d’étalonnage.
Solutions multiples et configuration des axes
Pour éviter les incohérences entre la pose réelle du robot et la pose planifiée par Mech-Viz dues aux multiples solutions de la cinématique inverse, certains fabricants de robots fournissent des paramètres de configuration des axes dans les commandes de mouvement du robot.
Une configuration des axes contient généralement quatre paramètres supplémentaires : trois paramètres contraignent les plages d’angle des axes 1, 4 et 6 du robot ; un paramètre définit le type de pose des axes 2 et 3. En ajoutant ces conditions aux limites, il est possible d’éliminer les solutions non souhaitées et de garantir que la pose du robot résultante corresponde à la pose planifiée dans Mech-Viz.
Singularité
Une singularité survient lorsque le robot atteint un ensemble spécifique de positions articulaires pour lesquelles les équations cinématiques ne peuvent pas être résolues ou que certains degrés de liberté sont perdus. À une singularité, le mouvement dans certaines directions devient impossible ou extrêmement amplifié, entraînant une instabilité ou un comportement imprévisible.
Types courants
En fonction de leur emplacement et de leur cause, les singularités des robots sont généralement classées dans les types suivants :
-
Singularité du poignet
Elle se produit lorsque les trois axes de rotation du poignet deviennent colinéaires, rendant l’orientation de l’extrémité du robot incontrôlable ou sujette à des changements brusques. Par exemple, sur un robot à six axes, une singularité du poignet peut survenir lorsque l’axe 5 est à 0° ou 180°.
-
Singularité du coude
Elle se produit lorsque l’avant-bras et le bras supérieur s’alignent en ligne droite, rendant impossible pour le robot de déterminer une configuration « coude levé » ou « coude baissé ». Cela peut conduire à des basculements entre solutions multiples ou à des changements de mouvement soudains lors de la planification de trajectoire.
-
Singularité de l’épaule
Elle se produit lorsque le centre du poignet du robot s’aligne avec l’axe de l’articulation 1, ou lorsque les axes des articulations forment une configuration colinéaire spécifique. Cela entraîne une perte de degrés de liberté de l’extrémité du robot dans certaines directions et peut provoquer de grandes rotations articulaires.
Dans les applications industrielles pratiques, la singularité la plus fréquente survient sur les robots à six axes à poignet sphérique lorsque les axes 4 et 6 s’approchent d’un alignement coaxial lors d’un mouvement linéaire.
Évitement des singularités
Les robots à six axes à poignet sphérique présentent intrinsèquement des singularités dans leur mouvement. Les stratégies suivantes peuvent aider à réduire le risque de rencontrer des singularités :
-
Concevoir des robots à poignet décalé : modifier la structure du robot pour empêcher l’alignement coaxial des axes 4 et 6. Exemples : séries UR et FANUC CRX.
-
Optimiser les commandes du contrôleur du robot : introduire des commandes qui utilisent moveJ comme approximation de moveL afin d’améliorer la faisabilité d’exécution.
-
Ajuster la planification de trajectoire logicielle : Mech-Viz réduit la vitesse du robot le long des trajectoires où des singularités peuvent se produire et tente de replanifier.
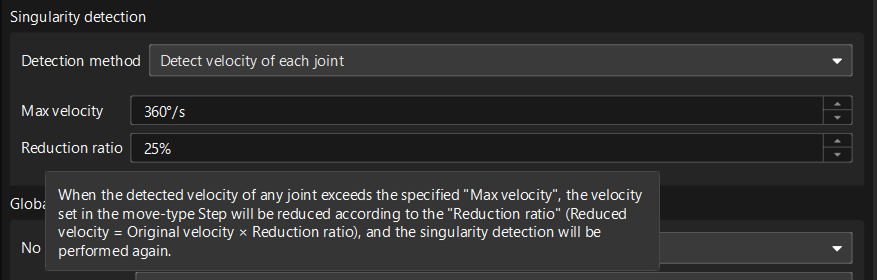
De plus, Mech-Viz peut détecter automatiquement les singularités potentielles lors de la planification de trajectoire. Pour des méthodes détaillées de détection des singularités, voir Détection des singularités.