Appariement fin 3D
Fonction
Cette étape peut apparier avec précision le modèle de nuage de points au nuage de points d’origine et produire des poses d’objet plus précises.
Scénario d’utilisation
Cette étape effectue un appariement fin basé sur les résultats d’appariement de Appariement grossier 3D V2 et fournit des poses d’objet plus précises pouvant être utilisées comme points de prise.
Entrées et sorties
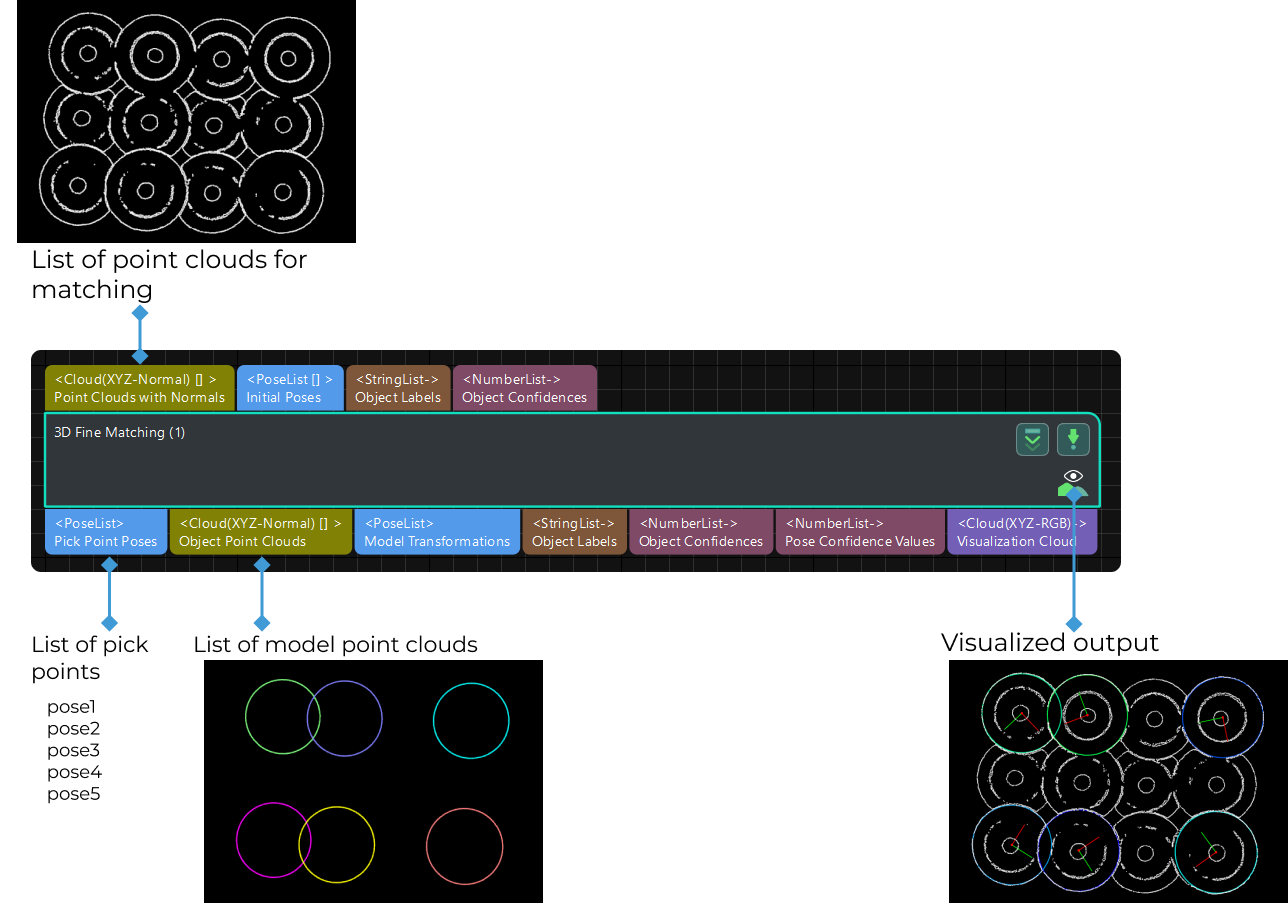
La description des autres ports d’entrée et de sortie est illustrée dans la figure suivante.
| Autre port d’entrée | Description |
|---|---|
Poses initiales |
Liste des poses candidates (généralement obtenues via l’appariement grossier 3D). |
Étiquettes d’objets |
L’entrée de ce port est généralement les étiquettes des objets cibles provenant des étapes d’apprentissage profond (facultatif). |
Niveaux de confiance des objets |
L’entrée de ce port est généralement les niveaux de confiance des objets cibles provenant des étapes d’apprentissage profond (facultatif). |
| Autre port de sortie | Description |
|---|---|
Transformations du modèle |
Liste des poses de référence de transformation du modèle vers la scène. |
Étiquettes d’objets |
Étiquettes des objets cibles (liées aux étapes d’apprentissage profond). |
Niveaux de confiance des objets |
Valeurs de confiance des objets cibles (liées aux étapes d’apprentissage profond). |
Valeurs de confiance des poses |
Liste des valeurs de confiance des poses d’objet correspondantes. |
Nuage de visualisation |
Afficher le résultat d’appariement avec un nuage de points coloré. Les points en blanc appartiennent au nuage de la scène, tandis que les points rendus avec différentes couleurs appartiennent à différents objets appariés. Les utilisateurs peuvent vérifier le résultat d’appariement des modèles de nuage de points en observant le degré de chevauchement entre les nuages de points blancs et colorés. |
Paramètres
Niveau d’ajustement des paramètres
Valeur par défaut : Basique
Liste de valeurs : Basique, Avancé
Indication : Vous pouvez choisir parmi les deux niveaux d’ajustement de paramètres suivants :
Niveau d’ajustement de paramètres Basique
Cette section présente les paramètres du niveau Basique, et ces paramètres sont également disponibles dans le Niveau d’ajustement de paramètres Avancé.
Paramètres du modèle
- Sélection du modèle
-
Indication : Cliquez sur le bouton déroulant pour sélectionner et appliquer un modèle de nuage de points et ses centres géométriques correspondants.
- Fichier du modèle
-
Indication : Cliquez sur
 pour sélectionner un fichier modèle de nuage de points au format PLY.
pour sélectionner un fichier modèle de nuage de points au format PLY. - Fichier du centre géométrique
-
Indication : Cliquez sur
pour sélectionner un fichier de centre géométrique au format JSON.
Calcul de l’orientation du nuage
- Mode de calcul de l’orientation des points
-
Valeur par défaut : Origin
Indication : Ce paramètre sert à spécifier la méthode de calcul des orientations des points du nuage de points. Quatre méthodes sont proposées ci-dessous. Veuillez en sélectionner une selon la situation réelle du projet.
| Liste de valeurs | Description |
|---|---|
Origin |
Obtenir directement la normale à partir du modèle de nuage de points lorsque le fichier contient la normale du modèle de nuage de points. |
StandardMode |
Utiliser le CPU pour recalculer la direction normale du nuage de points d’entrée. Il est recommandé d’utiliser ce mode lorsque le fichier modèle ne possède pas de direction normale : rechercher les k points les plus proches de la cible et utiliser la PCA (analyse en composantes principales) pour obtenir le vecteur propre minimal comme direction normale du point. |
EdgeTangent |
Calculer la tangente au bord du modèle de nuage de points et prendre la tangente comme normale. Cette méthode peut distinguer différents objets dont les contours externes sont des images miroir l’un de l’autre. Cette méthode est recommandée lorsque l’appariement de bords est effectué sur des objets relativement plats. Il existe deux scénarios d’utilisation à titre d’exemple comme suit. |
Scénario 1 : Les deux faces de l’objet doivent être distinguées. L’étape Appariement et classification 3D (modèles multiples) peut être utilisée, et il doit y avoir deux modèles de nuage de points correspondant respectivement aux deux faces de l’objet. |
|
Scénario 2 : Il n’est PAS nécessaire de distinguer les deux faces de l’objet. Dans ce cas, l’étape Appariement fin 3D avec un seul modèle de nuage de points est applicable. |
|
EdgeNormal |
Calculer la normale au bord du modèle de nuage de points. Cette méthode est recommandée lorsque l’appariement de bords est effectué sur des objets relativement plats. |
|
Lors de l’utilisation des méthodes EdgeTangent ou EdgeNormal, assurez-vous que chaque nuage de points de bord ne contient pas plusieurs objets ; en d’autres termes, chaque nuage de points d’objet est séparé. |
- Nombre de points de recherche
-
Valeur par défaut : 10
Indication : Ce paramètre sert à définir le nombre de points à rechercher dans le voisinage du point cible. La valeur minimale est 1.
Méthode d’appariement
Valeur par défaut : GMM
Liste de valeurs : GMM et voisin le plus proche.
Indication : Ce paramètre sert à sélectionner la méthode d’appariement local pour apparier le modèle de nuage de points avec le nuage de points de la scène. Le modèle de nuage de points se déplacera et tournera selon la plage définie afin de correspondre au nuage de points de la scène obtenu lors de l’étape d’appariement précédente.
Exemple : Dans la plupart des scénarios, GMM présente une meilleure capacité d’anti-interférence et une vitesse d’appariement plus élevée, il est donc généralement recommandé ; dans de rares cas où GMM ne peut pas répondre à la demande, voisin le plus proche peut être sélectionné.
Paramètres sous GMM
- Mode d’appariement
-
Valeur par défaut : Standard
Liste de valeurs : HighSpeed, Standard et HighPrecision.
Indication : Il existe trois modes d’appariement. Sélectionnez celui qui convient selon les exigences du projet :
HighSpeed : le plus rapide mais moins précis. Standard : relativement stable. HighPrecision : le plus précis mais plus lent.
- Nombre d’itérations
-
Valeur par défaut : 30
Indication : L’itération consiste à exécuter de manière répétée une instruction spécifique jusqu’à ce que les conditions soient satisfaites. Le nombre d’itérations correspond au nombre de répétitions d’exécution d’instructions dans ce processus. Le paramètre défini ici est la limite supérieure du nombre d’itérations. Plus la valeur est grande, plus le nombre de calculs d’appariement est élevé, ce qui signifie un temps d’exécution plus long et une précision accrue.
- Écart-type
-
Valeur par défaut : 3.000 mm
Indication : La valeur doit correspondre à la déviation de la pose initiale. Lorsque, après l’étape précédente Appariement grossier 3D V2, la déviation de la pose initiale est importante, c’est-à-dire que la déviation entre le nuage de points de la scène et le modèle de nuage de points est grande, il convient de définir un Écart-type plus élevé en conséquence, ce qui entraînera une vitesse de traitement plus rapide.
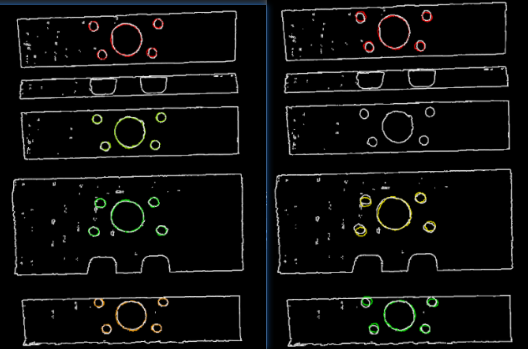
Exemple : Lorsque la valeur définie est supérieure à la déviation de la pose initiale, il y aura un grand écart de résultat. Comme illustré ci-dessous, l'Écart-type à droite est de 40.000 mm, bien supérieur à la déviation de la pose initiale. On voit que le résultat d’appariement à droite, avec un écart-type excessif, est moins précis. Normalement, cette valeur ne dépasse pas 10 mm.
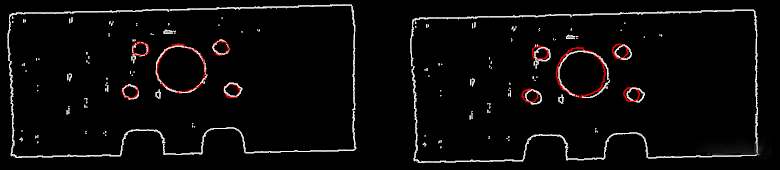
Pour les pièces plus petites, il est recommandé de réduire l’écart-type à une valeur plus faible pour obtenir des résultats d’appariement plus précis.
- Nombre d’étapes de mise à jour de l’écart-type
-
Valeur par défaut : 3
Indication : Pendant le processus d’appariement, l'Écart-type diminue progressivement jusqu’à atteindre la valeur de l'Écart-type minimal. Le nombre de fois où l’écart-type diminue dans ce processus correspond à la valeur de ce paramètre. Dans certains cas avec un écart-type important, plus le nombre de diminutions est élevé, plus le processus de diminution globale est stable. En règle générale, ce paramètre n’a pas besoin d’être ajusté.
- Accélération pour une grande quantité d’objets
-
Valeur par défaut : Désactivé.
Indication : Il est recommandé d’activer cette option lorsqu’il y a un grand nombre d’objets dans la scène. Si elle est activée, l’étape s’exécutera plus rapidement en présence d’un grand nombre d’objets. Cependant, si le nombre d’objets est faible, la vitesse de traitement de l’étape peut être ralentie.
Paramètres sous Voisin le plus proche
Paramètres d’itération
- Rayon de recherche du point le plus proche
-
Valeur par défaut : 10.000 mm
Plage de valeurs : [1.000, +∞)
Indication : Ce paramètre sert à ajuster le rayon de recherche du point le plus proche (en mm), et la valeur doit correspondre à la déviation de la pose initiale en entrée. Lorsque la déviation de la pose initiale est grande (la déviation entre le nuage de points de la scène et le modèle de nuage de points est importante), ce paramètre doit être augmenté ; lorsque la déviation de la pose initiale est très faible, ce paramètre peut être réglé sur une petite valeur. La valeur minimale pouvant être définie pour ce paramètre est 1.000 mm. Si le rayon est inférieur à cette limite inférieure, certains points distribués de manière clairsemée peuvent ne pas trouver le point le plus proche, ce qui pourrait affecter le résultat de sortie.
- Seuil MSE
-
Valeur par défaut : 0.001
Indication : Ce paramètre (seuil d’erreur quadratique moyenne) sert à ajuster la limite supérieure de l’erreur quadratique moyenne. Cette valeur est enregistrée après chaque itération et utilisée pour la comparaison lors des étapes d’itération suivantes. Lorsque l’erreur quadratique moyenne d’une itération est inférieure à la valeur définie, on considère que l’effet de l’itération répond aux exigences et l’itération sera terminée.
- Taille de la fenêtre
-
Valeur par défaut : 10
Plage de valeurs : [3, +∞)
Indication : Ce paramètre fait référence au nombre d’itérations consécutives avec de faibles fluctuations d’erreur dans le processus d’optimisation itérative. Lorsque ce paramètre est trop petit, une solution optimale locale peut apparaître, ce qui affecte la précision finale de l’appariement. Exemple : si la fenêtre ne contient que l’erreur des résultats de trois itérations consécutives, la tendance de l’erreur ne peut être obtenue qu’en comparant les erreurs de ces trois itérations, ce qui peut conduire à une solution optimale locale (l’erreur de la deuxième itération est inférieure à celle de la première et de la première) au lieu d’une solution optimale globale. Selon la valeur recommandée du nombre d’itérations, qui est 30, des itérations ultérieures avec une réduction d’erreur plus significative peuvent se produire.
- Afficher les correspondances
-
Valeur par défaut : Non sélectionné.
Indication : S’il est sélectionné, les points correspondants seront affichés à chaque itération.
- Objet complexe
-
Valeur par défaut : Non sélectionné.
Indication : Sélectionnez-le si l’objet cible a une forme complexe (pas une forme géométrique simple) ou si la fonction Poids automatique est nécessaire.
- Poids automatique
-
Valeur par défaut : Non sélectionné.
Indication : S’il est sélectionné, le poids des points d’itération sera calculé automatiquement. Il est recommandé d’utiliser cette fonction pour des objets dont les résultats d’appariement grossier sont médiocres.
Rejet de paires de points
- Rejeter les paires
-
Valeur par défaut : Non sélectionné.
Indication : Ce paramètre détermine s’il faut supprimer les paires de points répétées. Il existe plusieurs paires de points lors de la recherche du point le plus proche, et parfois les paires indésirables doivent être filtrées. Si cette option est sélectionnée, cette fonction sera utilisée pour les supprimer en configurant les paramètres Seuil N sigma et Seuil de différence d’angle des paires de points suivants ; si elle n’est pas cochée, ces deux paramètres ne prendront pas effet pendant le processus d’appariement.
- Seuil N sigma
-
Valeur par défaut : 1.0000
Indication : Ce paramètre est le multiplicateur du seuil d’écart-type de la distance entre chaque point. La paire de points dont la distance est en dehors de N sigma sera éliminée.
- Seuil de différence d’angle des paires de points
-
Valeur par défaut : 45°
Indication : Ce paramètre est la limite supérieure de la différence d’angle (en °) entre les normales de deux points dans chaque paire de points appariée. Si la différence d’angle est supérieure à cette valeur, cette paire de points sera éliminée.
- Appliquer des poids aux paires
-
Valeur par défaut : Non sélectionné.
Indication : S’il est sélectionné, le poids du modèle sera utilisé lors de l’itération de l’algorithme, ce qui augmente la probabilité d’un meilleur appariement.
- Supprimer les correspondances répétées
-
Valeur par défaut : Non sélectionné.
Indication : S’il est sélectionné, la fonction de suppression des paires de points correspondantes répétées sera utilisée, et les réglages de Type de suppression des correspondances répétées prendront effet. Il est recommandé d’utiliser cette fonction lorsque le modèle de nuage de points comporte plus de points que ceux d’un seul objet dans la scène.
- Type de suppression des correspondances répétées
-
Valeur par défaut : MinDis
Liste de valeurs : MinDis et GlobalMin
Indication : Ce paramètre permet de sélectionner la méthode de suppression des paires de points correspondantes répétées. Il existe deux méthodes au total :
MinDis : Calculer la distance entre les paires de points répétitives. Ensuite, conserver la paire de points avec la plus petite distance et supprimer les autres paires répétitives. Davantage de paires de points correspondantes répétées seront éliminées avec cette méthode que l’autre. GlobalMin : Prendre la valeur moyenne des distances entre les paires de points répétitives comme référence afin de trouver la paire dont la distance est la plus proche de cette valeur moyenne. Ensuite, conserver cette paire et éliminer les autres. Moins de paires de points correspondantes répétées seront éliminées avec cette méthode que l’autre.
Paramètres d’échantillonnage
- Intervalle d’échantillonnage
-
Valeur par défaut : 5.000 mm
Indication : Ce paramètre est utilisé pour le sous-échantillonnage du modèle et du nuage de points de la scène. Plus l’intervalle est grand, moins il y a de points dans le nuage de points échantillonné, et plus l’estimation du modèle est moins précise.
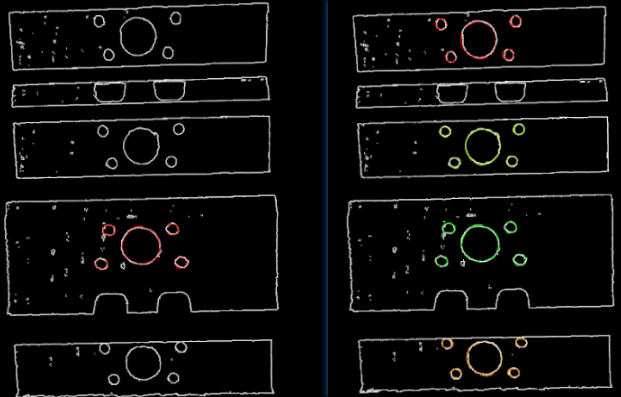
Exemple : La figure ci-dessous montre les résultats de sortie lorsque l’intervalle d’échantillonnage est réglé à 5.000 mm et 25.000 mm, respectivement. Les parties blanches sont les nuages de points des objets en entrée, et les lignes colorées sont les résultats d’appariement. On peut voir d’après la comparaison des deux images que plus l’intervalle d’échantillonnage est petit, plus le résultat de sortie sera précis.
Paramètres de validation
- Seuil de confiance
-
Valeur par défaut : 0.500
Plage de valeurs : [0, +∞)
Indication : Le seuil de confiance sert à déterminer si le résultat d’appariement est valide. Les résultats d’appariement dont la confiance est supérieure au seuil sont valides, et ceux inférieurs ne le sont pas. Un seuil plus élevé conduit à moins d’appariements valides, tandis que les résultats de sortie sont plus précis. Un seuil plus faible conduit à davantage d’appariements valides, tandis que les résultats de sortie sont moins précis.
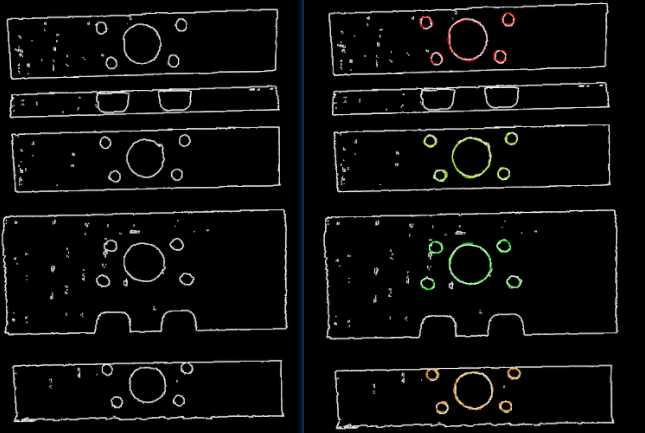
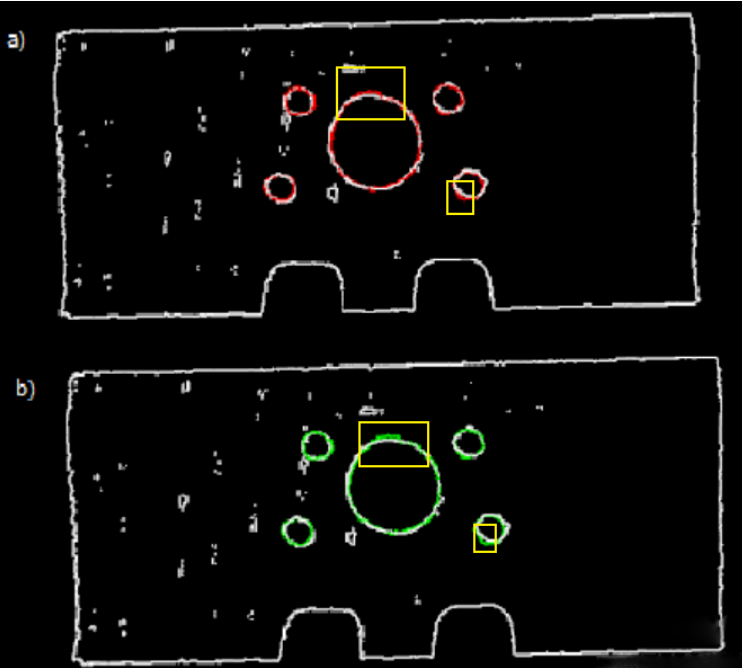
Exemple : Dans la figure ci-dessous, le seuil de confiance de (a) est 0.500 et celui de (b) est 0.920. L’appariement de (a) est plus précis que celui de (b). On en déduit que plus le Seuil de confiance est élevé, plus il est probable que des résultats avec une précision d’appariement supérieure soient conservés.
Même lorsqu’un seuil plus élevé est défini, il peut ne pas y avoir de résultat d’appariement valide à produire. Cela peut être dû au fait que différentes parties de l’objet cible ont la même forme.
- Rayon de recherche pour la validation
-
Description : Lorsque la distance entre le nuage de points de la scène et le modèle de nuage de points est inférieure à cette valeur, on considère que le nuage de points de la scène et le modèle de nuage de points coïncident. Plus il y a de points qui coïncident, plus le score de validation du résultat d’appariement est élevé.
Valeur par défaut : 10.000 mm
Indication : La valeur de ce paramètre influence le score d’appariement. Plus la valeur de ce paramètre est élevée, plus le critère d’évaluation du résultat d’appariement sera permissif, ce qui signifie que même si le résultat d’appariement de la pose est de faible qualité, le score d’appariement sera élevé ; plus la valeur est petite, plus le critère d’évaluation du résultat d’appariement de la pose sera strict. Veuillez définir la valeur selon la situation réelle du nuage de points. Si les points du nuage de points sont clairsemés, la valeur du paramètre doit être réglée plus grande.
|
Lors du réglage des paramètres, vous pouvez d’abord définir un Rayon de recherche pour la validation initial et exécuter l’étape. Ensuite, vous pouvez vérifier le résultat d’appariement dans la fenêtre de sortie de débogage et comparer le résultat au score d’appariement de la pose. Si le résultat d’appariement ne correspond pas au score d’appariement, veuillez ajuster le Rayon de recherche pour la validation selon la situation réelle. |
Paramètres de sortie
- Nombre maximal de poses détectées dans chaque nuage de points
-
Valeur par défaut : 1
Plus la valeur est grande, plus il y a d’appariements générés.
Indication : Plus la valeur est grande, plus il y aura de paires d’appariement en sortie. La figure ci-dessous montre les résultats de sortie lorsque ce paramètre est réglé sur 1 (gauche) et 4 (droite).
Visualisation des résultats
- Afficher les résultats d’appariement
-
Valeur par défaut : Sélectionné.
Indication : Si cette option est sélectionnée, le modèle de sortie et le nuage de points de la scène seront affichés.
Niveau d’ajustement de paramètres Avancé
Ce chapitre présente uniquement les paramètres que le mode Basique ne contient pas. Si certains paramètres sont identiques à ceux du mode Basique, veuillez vous référer à Basique.
Paramètres de symétrie
Lorsque une partie de la pièce à reconnaître est symétrique, vous devrez ajuster les paramètres de symétrie pour éviter un optimum local du résultat d’appariement. Un axe passant par le point central de l’objet comme origine sera spécifié comme axe de rotation, et le modèle de nuage de points tournera autour de l’axe spécifié selon l’angle de symétrie, permettant ainsi d’obtenir le résultat d’appariement optimal.
- Axe de symétrie
-
Valeur par défaut : ROTATE_BY_Z
Liste de valeurs : ROTATE_BY_X, ROTATE_BY_Y et ROTATE_BY_Z
Indication : Ce paramètre sert à sélectionner l’axe de rotation de symétrie autour duquel la pose initiale est modifiée.
- Pas angulaire
-
Valeur par défaut : 360°
Indication : Ce paramètre spécifie l’angle de symétrie de rotation.
Exemple : si un objet présente le même aspect avant et après une rotation de 60° autour d’un axe, son angle de symétrie de rotation est de 60°.
- Angle minimal de rotation
-
Valeur par défaut : −180°
Indication : Ce paramètre est utilisé pour régler l’angle minimal de rotation.
- Angle maximal de rotation
-
Valeur par défaut : 180°
Indication : Ce paramètre est utilisé pour régler l’angle maximal de rotation.
- Exemple
-
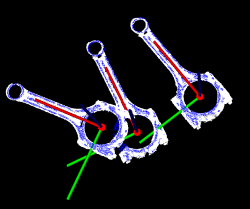
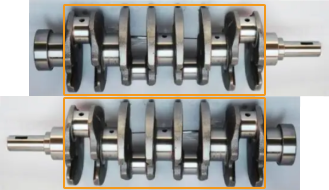
Comme illustré ci-dessous, la partie principale du vilebrequin, c’est-à-dire la partie dans le cadre, présente une symétrie de rotation de 180° le long de l’axe Y.
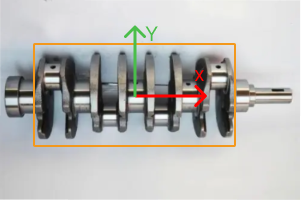
Si vous n’ajustez pas les paramètres de symétrie, des erreurs d’appariement peuvent se produire, car les formes de certaines parties du modèle de nuage de points et du vilebrequin sont similaires, comme montré ci-dessous.
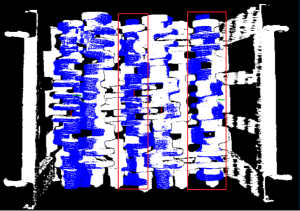
Seule la partie centrale du modèle de nuage de points et du vilebrequin correspond l’une à l’autre. Cependant, si le modèle de nuage de points effectue une rotation de 180°, il correspondra à l’ensemble du vilebrequin, et la confiance d’appariement correspondante sera plus élevée.
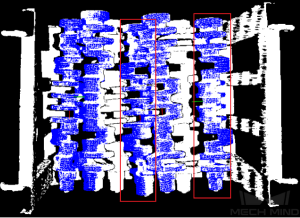
Après avoir défini ROTATE_BY_Y (l’axe Y du point central de l’objet) comme axe de symétrie et réglé le pas angulaire à 180°, le vilebrequin s’apparie correctement, comme illustré ci-dessous.
Paramètres de filtrage des poses
- Filtrer la pose par angle de rotation du modèle
-
Indication : En mode d’appariement de bords, le modèle de nuage de points peut devoir être tourné d’un certain angle pour correspondre au nuage de points de la scène, et les poses seront filtrées selon l’angle de rotation du modèle de nuage de points. Lorsque l’angle de rotation du modèle dépasse le seuil supérieur de différence angulaire, la pose sera filtrée.
Valeur par défaut : Désactivé.
- Seuil supérieur de différence angulaire
-
Indication : Voir l’info-bulle de Filtrer la pose par angle de rotation du modèle.
Valeur par défaut : 135.000°
Poids du modèle lors de la validation
Lorsque les pièces à reconnaître ont un corps principal similaire, tandis que leurs parties spécifiques diffèrent fortement, le poids des « parties » devrait être plus élevé afin de produire un résultat d’appariement correct.
- Fichier des fragments de modèle à poids élevé
-
Indication : Ce fichier (format PLY) est un fragment du fichier modèle. Selon la pièce réelle, déterminez quelle partie est sélectionnée comme fichier à poids élevé. Les points de ce fichier ont un poids élevé défini par le Poids de chaque point.
- Poids de chaque point
-
Valeur par défaut : 2.0000
Indication : Ce paramètre sert à définir la valeur de poids pour les parties présentant des caractéristiques saillantes dans le modèle de nuage de points. Le poids initial de tous les points est 1. Après avoir défini ce paramètre pour le nuage cible, le coefficient de poids du nuage cible deviendra 1Xceparamètre, afin d’obtenir un effet de mise en évidence lors des étapes d’appariement ultérieures.
- Rayon de recherche lors de la définition du poids
-
Valeur par défaut : 3.000 mm
Indication : Ce paramètre sert à définir le rayon pour la mise en place des poids. L’unité est le millimètre. La définition du poids est une opération effectuée sur le modèle de nuage de points original. Le modèle de nuage de points sera sous-échantillonné avant d’être utilisé dans le processus d’appariement, ce qui entraîne le déplacement ou la perte de certains points. Dans le processus de définition du poids des points proches du point manquant, il est nécessaire de définir le rayon de recherche, lequel est défini par ce paramètre.
Paramètres de validation
- Prendre en compte l’erreur des angles des normales
-
Description : Lors de la validation des résultats d’appariement, prendre en compte l’erreur d’angle entre les normales des points du nuage de la scène et leurs homologues dans le modèle de nuage de points. Une fois ce paramètre sélectionné, le nombre de résultats d’appariement en sortie sera moindre, mais la précision des résultats d’appariement sera améliorée.
Valeur par défaut : Non sélectionné.
Indication : S’il est sélectionné, la différence angulaire du vecteur normal de la paire de points correspondants sera prise en compte dans le processus de validation de la pose. Dans ce cas, bien que les sorties soient souvent réduites, elles peuvent être plus précises.
- Multiplier le ratio de points correspondants dans la scène
-
Valeur par défaut : Non sélectionné.
Indication : S’il est sélectionné, le score d’appariement sera multiplié par le coefficient proportionnel du point correspondant par rapport au point de la scène. Ce n’est pas adapté au cas où des poses de plusieurs objets sont estimées dans un seul nuage de points.
Visualisation des résultats
- Afficher le nuage de modèle échantillonné
-
Valeur par défaut : Non sélectionné.
Indication : S’il est sélectionné, le modèle de nuage de points échantillonné sera visualisé dans la sortie.
- Afficher le nuage de scène échantillonné
-
Valeur par défaut : Non sélectionné.
Indication : S’il est sélectionné, le nuage de points de la scène échantillonné sera visualisé dans la sortie.
- Afficher les correspondances de points de validation
-
Valeur par défaut : Non sélectionné.
Indication : S’il est sélectionné, la relation de correspondance entre le modèle et le nuage de points de la scène sera visualisée dans la sortie.