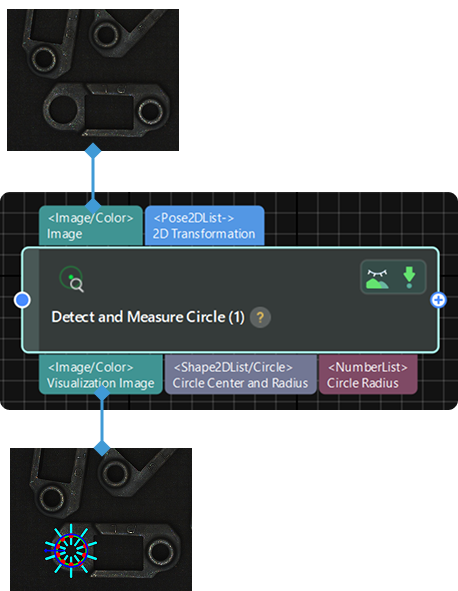
Détecter et mesurer un cercle
Fonction
Cette étape sert à détecter et à mesurer les cercles dans l’image d’entrée.
|
Avant d’utiliser cette étape, activez l’option step_measure2d sous dans la barre de menus. Ce n’est qu’alors que l’opération peut être effectuée. |
Scénario d’utilisation
Cette étape est utilisée pour détecter les positions (au pixel près) et les rayons des cercles dans les images afin de préparer le calcul ultérieur des dimensions physiques dans des scénarios de mesure.
Description des paramètres
- ROI
-
Description : Ce paramètre est utilisé pour spécifier la région d’intérêt (ROI), qui limite la plage de détection et de mesure d’un cercle.
Instruction : La procédure d’utilisation de cette étape est la suivante.
-
Ouvrir la vue Measurement Canvas (2D) : Accédez à dans la barre de menus et sélectionnez l’option Toile de mesure (2D). Ensuite, passez au volet Toile de mesure (2D) dans le volet droit de configuration du projet.
-
Sélectionner l’étape actuelle : Cliquez pour sélectionner l’étape actuelle dans l’espace de programmation graphique.
-
Sélectionner la région à détecter : Dans le volet Toile de mesure (2D) à droite, la boîte de sélection s’affiche par défaut dans le coin supérieur gauche de l’image. Il est recommandé de zoomer l’image à une échelle appropriée au préalable. Survolez la boîte de sélection avec le curseur de la souris. Lorsqu’il se transforme en icône de main, maintenez le bouton gauche de la souris enfoncé pour faire glisser et redimensionner la boîte.
-
Confirmer les paramètres du ROI : Une fois la sélection terminée, les valeurs de la région choisie (Centre X, Centre Y, Largeur, Hauteur et Angle) seront affichées dans les paramètres du ROI.
-
- Correction de position et d’orientation
-
Description : Ce paramètre est utilisé pour ajuster la position et l’orientation du ROI selon la transformation 2D d’entrée.
Paramètre par défaut : Non sélectionné
Instruction : S’il est sélectionné, le ROl défini lors de l’exécution précédente sera converti vers la position et l’orientation s’adaptant à l’objet dans l’image d’entrée de l’exécution actuelle, conformément à la transformation 2D d’entrée.
- Nombre de cadres de détection de bords
-
Description du paramètre : Ce paramètre sert à définir le nombre de cadres de détection de bords générés à l’intérieur du ROI défini. Des points de bord d’objet utilisés pour l’ajustement seront générés dans chaque cadre de détection. Plus la valeur est grande, plus l’échantillonnage des points de bord est dense et plus la précision de l’ajustement est élevée ; toutefois, la charge de calcul augmente également. Si la valeur est trop faible, des détails de bord peuvent être perdus.
Valeur par défaut : 10
Instruction : Définissez le paramètre selon le besoin réel.
- Seuil inférieur de variation de niveau de gris
-
Description : Cette étape est utilisée pour définir le seuil inférieur de la variation de niveau de gris du point dans les cadres de détection de bords.
Valeur par défaut : 20
Instruction : Les points situés dans les cadres de détection sont considérés comme des points de bord de l’objet lorsque la variation du gradient de niveaux de gris dépasse le seuil inférieur défini ; lorsque la variation du gradient est inférieure au seuil, ils sont ignorés.
- Demi-largeur du cadre de détection de bords
-
Description : Ce paramètre est utilisé pour définir la demi-largeur du cadre de détection de bords.
Valeur par défaut : 1
Instruction : Augmentez la valeur lorsque le bord est peu net ; diminuez-la de manière appropriée lorsque le bord est net.
- Sigma du filtre gaussien
-
Description : Ce paramètre est utilisé pour filtrer l’image verticalement à l’intérieur des cadres de détection de bords.
Valeur par défaut : 1.0
Recommandation d’ajustement : Il est recommandé d’utiliser la valeur par défaut.
- Type de polarité de bord
-
Description : Ce paramètre est utilisé pour spécifier quel type de variation de niveau de gris sera considéré comme des points de bord de l’objet. La variation de niveau de gris est définie comme la variation de niveau de gris verticalement de haut en bas dans un cadre de détection de bords.
Liste de valeurs : Blanc vers noir, Noir vers blanc, Les deux
-
Blanc vers noir : Les variations de niveau de gris allant du blanc vers le noir dans les cadres seront considérées comme des points sur les bords de l’objet.
-
Noir vers blanc : Les variations de niveau de gris allant du noir vers le blanc dans les cadres seront considérées comme des points sur les bords de l’objet.
-
Les deux : Les variations de niveau de gris allant du noir vers le blanc et du blanc vers le noir dans les cadres seront toutes considérées comme des points sur les bords de l’objet.
Valeur par défaut : Les deux
-
- Sélection des bords
-
Description : Ce paramètre est utilisé pour sélectionner les points de bord détectés à l’intérieur du cadre de détection afin d’ajuster le bord complet.
Liste de valeurs : Premier, Deuxième, Dernier, Tous
-
Premier : Le premier point du haut vers le bas dans le cadre sera sélectionné pour l’ajustement.
-
Deuxième : Le deuxième point du haut vers le bas dans le cadre sera sélectionné pour l’ajustement.
-
Dernier : Le dernier point du haut vers le bas dans le cadre sera sélectionné pour l’ajustement.
-
Tous : Tous les points dans le cadre seront sélectionnés pour l’ajustement.
Valeur par défaut : Premier
-
- Demi-hauteur du cadre de détection de bords
-
Description : Ce paramètre est utilisé pour définir la demi-hauteur du cadre de détection de bords.
Valeur par défaut : 30
Instruction : Lorsque les cadres de détection couvrent correctement les bords, la valeur de ce paramètre peut être abaissée de manière appropriée.
- Méthode d’ajustement
-
Description : Ce paramètre est utilisé pour spécifier le type d’algorithme pour l’ajustement de cercle.
Liste de valeurs : Moindres carrés, Huber
-
Moindres carrés : Cette méthode ajuste le cercle en minimisant la somme des distances géométriques au carré de tous les points à la circonférence. Elle offre une grande efficacité de calcul et convient aux scénarios où les points de bord sont répartis uniformément avec peu de valeurs aberrantes, mais elle est sensible aux anomalies. Il est recommandé de sélectionner cette option lorsque les points de bord sont uniformément répartis et qu’il y a peu de bruit.
-
Huber : Une méthode d’ajustement robuste qui se comporte de manière similaire à la méthode des moindres carrés lorsque l’écart est faible, mais peut supprimer efficacement l’influence des valeurs aberrantes lorsque l’écart est important. Il est recommandé de sélectionner cette méthode lorsque la qualité des points de bord est faible ou que des valeurs aberrantes sont présentes dans l’image.
Paramètre par défaut : Huber
-
Paramètres de visualisation
- Afficher le ROI
-
Description du paramètre : Ce paramètre permet de déterminer s’il faut afficher la région de détection et l’orientation sur l’image. Il est utilisé pour indiquer le chemin et l’orientation de génération des cadres de détection de bords. La région de détection est un cercle tracé en prenant comme diamètre le côté le plus court du ROI rectangulaire sélectionné manuellement ; la ligne de direction de détection est un segment de ligne fléché aligné horizontalement avec le centre du cercle.
Paramètre par défaut : Sélectionné
Instruction : Lorsqu’il est activé, le ROI s’affiche en bleu foncé. Vous pouvez choisir d’afficher ou non le ROI selon le besoin réel.
- Afficher les cadres de détection de bords
-
Description : Ce paramètre permet de déterminer s’il faut afficher sur l’image les cadres de détection de bords utilisés pour extraire les points de bord. Les cadres de détection sont générés à partir du centre de la région de détection circulaire et répartis uniformément le long de la circonférence afin d’extraire les variations de niveau de gris dans ces cadres.
Paramètre par défaut : Sélectionné
Instruction : Lorsqu’ils sont activés, les cadres de détection s’affichent sous forme de segments de ligne bleu clair. L’affichage peut être activé/désactivé selon les besoins.
- Afficher les points de bord
-
Description : Ce paramètre permet de déterminer s’il faut afficher sur l’image les points de bord de l’objet utilisés pour l’ajustement. Les points de bord de l’objet sont détectés via les variations de niveaux de gris dans les cadres de détection.
Paramètre par défaut : Sélectionné
Instruction : Lorsqu’ils sont activés, les points de bord s’affichent en rouge. L’affichage peut être activé/désactivé selon les besoins.
- Afficher le cercle détecté
-
Description : Ce paramètre permet de déterminer s’il faut afficher sur l’image le cercle détecté dans le ROI.
Paramètre par défaut : Sélectionné
Instruction : Lorsqu’il est activé, le cercle s’affiche en vert. L’affichage peut être activé/désactivé selon les besoins.