Principes de correction
Au cours du processus de production, le fonctionnement prolongé du système de vision peut amener la caméra à subir une dérive thermique due aux variations de température. Cela affecte la stabilité de la reconnaissance de l’objet cible et entraîne une dérive de précision du système de vision, ce qui nécessite une correction. Cette section décrit les principes de base de la correction de la dérive pour le système de vision.
Qu’est-ce que la dérive thermique de la caméra ?
La dérive thermique de la caméra se produit lorsque les performances de la caméra changent en raison des variations de température. Ces variations de température provoquent la dilatation et la contraction des éléments internes de la caméra — tels que ses composants optiques, son électronique et ses structures mécaniques. Cela affecte la manière dont la caméra capture les images. Les changements possibles incluent des variations de la distance focale, une augmentation de la distorsion de l’image, des décalages de position des pixels, et d’autres effets, qui peuvent tous impacter la précision de la caméra et la stabilité de la reconnaissance de l’objet cible.
Comment corriger la dérive de précision du système de vision ?
La fonction de correction de dérive fournie par Mech-Mind compense la dérive de précision du système de vision en surveillant les variations des poses de la sphère d’étalonnage.
En supposant que la répétabilité du robot soit normale et que la caméra et la sphère d’étalonnage soient solidement montées, la collecte périodique des poses de la sphère d’étalonnage peut révéler une dérive de précision du système de vision si des changements dans ces poses sont détectés. Si la reconnaissance de l’objet cible est effectuée avec une dérive de précision, des poses d’objet cible erronées seront obtenues, ce qui impactera la tâche de prélèvement ultérieure.
En utilisant les fluctuations des poses de la sphère d’étalonnage pour évaluer l’ampleur de la dérive de précision du système de vision, la dérive peut être corrigée, ce qui garantit une reconnaissance précise de l’objet cible et un prélèvement stable par le robot.
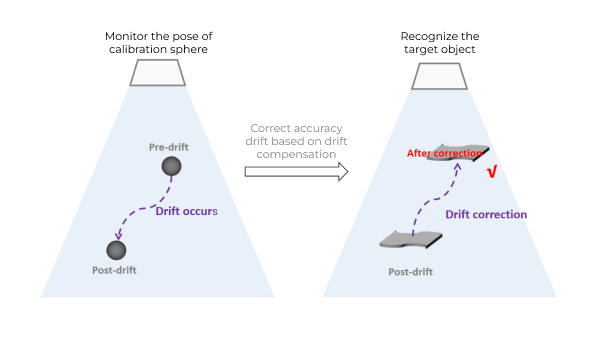
Comme illustré dans la figure ci-dessous, la figure de gauche montre la pose de la sphère d’étalonnage collectée avant et après la dérive de précision, qui sont utilisées pour générer les données de correction de dérive. La figure de droite montre l’effet de la correction de la dérive de précision à l’aide de la fonction de correction de dérive.