Configurer l’outil
Cette section présente les outils et leurs configurations correspondantes.
Introduction
Les outils, tels que les préhenseurs et les ventouses, sont des dispositifs mécaniques fixés à l’extrémité du bras robotisé pour effectuer diverses tâches.
Modèle de l’outil
Afin de visualiser l’outil dans la zone de simulation 3D et de l’intégrer à la détection de collisions, vous devez créer un modèle de visualisation et un modèle de collision de l’outil, puis les importer dans la bibliothèque de modèles.
Le tableau suivant indique les formats pris en charge pour le modèle de visualisation et le modèle de collision de l’outil :
| Format | STL | OBJ | DAE | Binvox |
|---|---|---|---|---|
Modèle de visualisation |
√ |
√ |
√ |
× |
Modèle de collision |
√ |
√ |
× |
× |
|
Type d’outil
Mech-Viz prend en charge l’outil standard, la pince à vide de dépalletisation et le préhenseur en matrice.
| Type d’outil | Description | Illustration |
|---|---|---|
Outil standard |
Tous les outils sauf les ventouses utilisées pour la dépalletisation et les préhenseurs en matrice. Par exemple, le préhenseur pneumatique et la ventouse simple. |
|
Pince à vide de dépalletisation |
Ventouses rectangulaires utilisées pour la dépalletisation. Les ventouses multiblocs sont prises en charge. |
|
Préhenseur en matrice |
Une matrice d’outils à l’extrémité du robot pouvant être utilisée pour effectuer de manière concertée des tâches de prise et de dépose. |
|



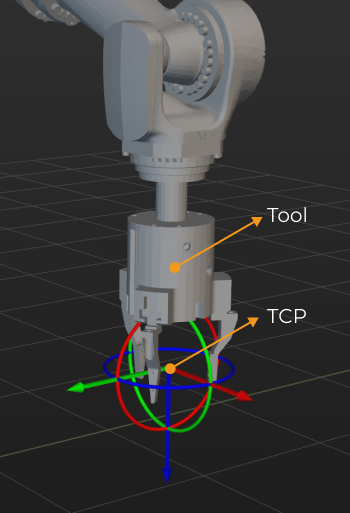
Point central de l’outil (TCP)
L’outil sert à saisir et déposer l’objet. Lorsque vous déplacez le robot vers un point spécifié pour exécuter une tâche de prise ou de dépose, vous déplacez en réalité le TCP (Tool Center Point) vers ce point. Le TCP par défaut est situé à l’extrémité du robot, mais il est parfois nécessaire de l’ajuster afin qu’il soit correctement positionné pour le processus réel de prise et de dépose.
Configurer l’outil
Importer le modèle de collision et le modèle de visualisation
Cliquez sur + à côté de , puis sélectionnez le modèle de collision et le modèle de visualisation dans la fenêtre contextuelle, et cliquez ensuite sur Ouvrir.
| Lorsque vous ouvrez la fenêtre de configuration de l’outil, vous pouvez ajouter un modèle en sélectionnant Importer un nouveau modèle dans le menu déroulant de Modèle de collision et Modèle de visualisation. |
Ajouter l’outil
Accédez à et cliquez sur + pour ouvrir la fenêtre de configuration de l’outil.
-
Saisissez un Nom d’outil.
-
Sélectionnez le Type d’outil en fonction de la situation réelle.
-
Sélectionnez le Modèle de collision dans la liste déroulante.
-
Sélectionnez le Modèle de visualisation pour l’affichage dans la zone de simulation 3D. Lorsque la position ou la taille du modèle de visualisation n’est pas correcte, veuillez vous référer à Adapter la position ou la taille du modèle d’outil pour ajuster le modèle.
-
Selon les situations réelles, vous pouvez définir le paramètre Rotation pour la prise sur Désactiver la rotation ou Activer la rotation pour la prise. Si vous choisissez Activer la rotation pour la prise, veuillez définir Nombre d’essais. La configuration de la rotation pour la prise peut éviter les rotations inutiles de l’outil terminal du robot lors des opérations de prise et de dépose. Cela augmente le taux de réussite de la planification de trajectoire et réduit le temps nécessaire, permettant au robot de se déplacer plus souplement et rapidement.
360°/Nombre d’essais = L’angle de rotation de l’outil à chaque fois -
Suivez l’une des méthodes ci-dessous pour définir le TCP.
Mettre à jour le TCP depuis le robot
Cliquez sur le bouton pour synchroniser le TCP du robot réel avec le logiciel.
Effectuer l’étalonnage du TCP
Contrôlez le robot pour qu’il tourne autour d’un point fixe et enregistrez plusieurs ensembles de poses de la bride afin de calculer le TCP.
Modifier le paramètre du TCP
Modifiez directement les angles d’Euler ou les quaternions.
Utiliser des données TCP précises
Si vous avez déjà obtenu des données TCP exactes par d’autres méthodes, vous pouvez cliquer sur « Modifier la pose » et coller les données dans la fenêtre contextuelle.
-
Si vous utilisez un outil standard, vous n’avez pas besoin de configurer la logique de contrôle. Si vous utilisez une pince à vide ou un préhenseur en matrice, veuillez vous référer à Configurer la logique de contrôle de l’outil pour poursuivre la configuration de la logique de contrôle.
-
Cliquez sur OK pour terminer.
Si vous devez ajouter d’autres outils, veuillez répéter les étapes ci-dessus.
Supprimer l’outil
Suivez l’une des étapes suivantes pour supprimer l’outil.
-
Accédez à , sélectionnez le nom de l’outil et appuyez sur la touche Suppr.
-
Accédez à , cliquez avec le bouton droit sur le nom de l’outil et sélectionnez Supprimer dans le menu contextuel.
Modifier l’outil
-
Suivez l’une des étapes suivantes pour ouvrir la fenêtre de configuration de l’outil.
-
Accédez à , double-cliquez sur le nom de l’outil.
-
Accédez à , cliquez avec le bouton droit sur le nom de l’outil et sélectionnez Configuration de l’outil dans le menu contextuel.
-
-
Modifiez les paramètres selon les besoins réels.
-
Cliquez sur OK.
Définir comme outil actif
Si vous n’ajoutez qu’un seul outil, l’outil actuel est l’outil actif. Si vous ajoutez plusieurs outils, le premier outil ajouté sera utilisé comme outil actif par défaut.
Pour définir un outil comme outil actif, accédez à , cliquez avec le bouton droit sur l’outil que vous souhaitez utiliser et sélectionnez Définir comme outil actif.
Ajuster la position ou la taille du modèle d’outil
Suivez les étapes ci-dessous pour ajuster le modèle d’outil lorsque sa position n’est pas correcte :
-
Double-cliquez sur le modèle d’outil sous .
-
Ajustez les paramètres de pose dans la fenêtre contextuelle de configuration du modèle pour corriger la position du modèle dans la zone de simulation 3D.
Suivez les étapes ci-dessous pour ajuster le modèle lorsque sa taille n’est pas correcte :
-
Double-cliquez sur le modèle d’outil sous .
-
Dans la fenêtre contextuelle de configuration du modèle:
-
Ajustez l’Échelle si vous souhaitez modifier l’échelle de l’ensemble du modèle.
-
Si vous souhaitez ajuster l’échelle séparément sur les axes X, Y ou Z, décochez la case Conserver le ratio pour X,Y,Z et ajustez l’échelle sur chaque direction respectivement.
-
Configurer la logique de contrôle de l’outil
Outil standard |
Veuillez vous référer à Configurer des actions d’outil générales pour des instructions détaillées. |
Pince à vide de dépalletisation |
Veuillez vous référer à Pince à vide de dépalletisation pour des instructions détaillées. |
Préhenseur en matrice |
Veuillez vous référer à Configurateur de préhenseur en matrice pour des instructions détaillées. |