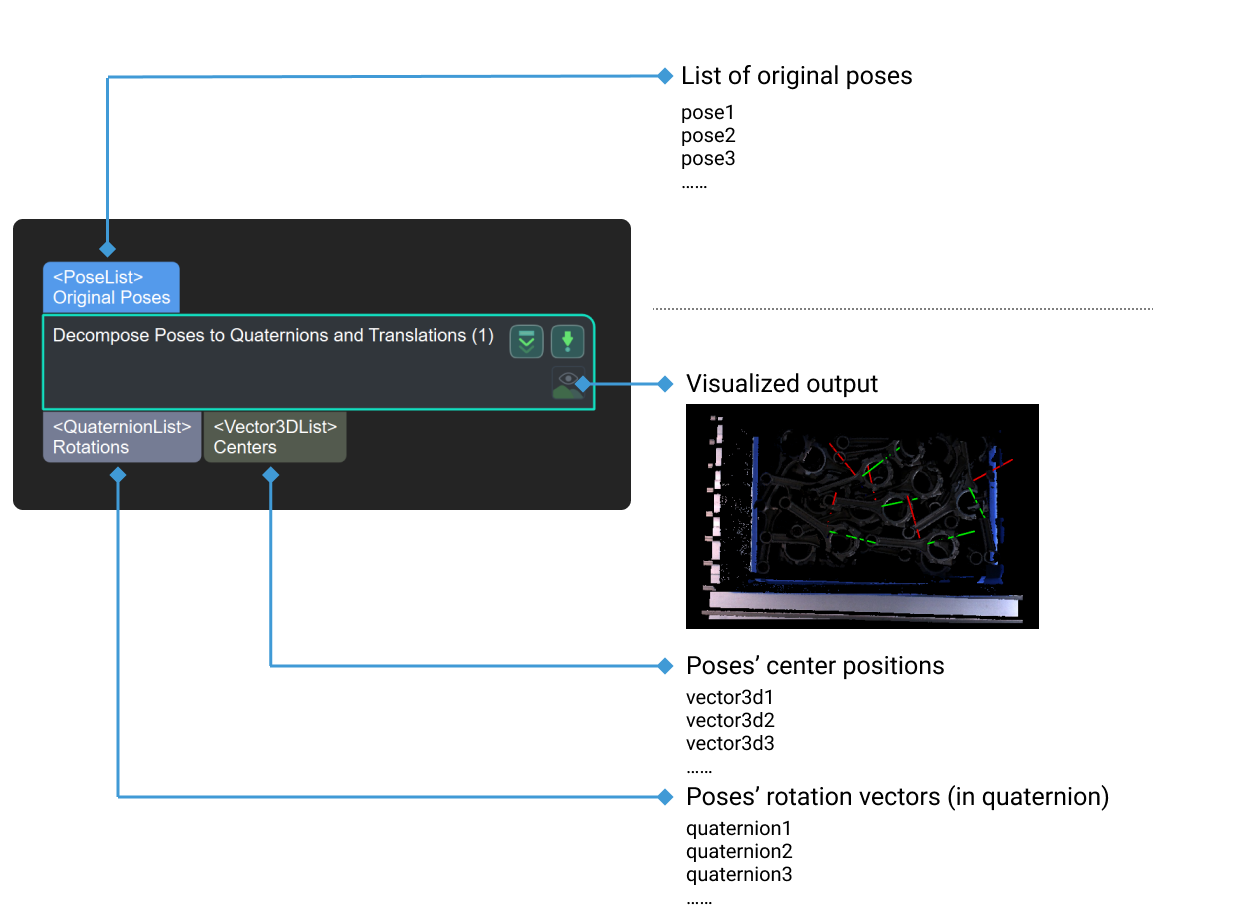
Décomposer les poses en quaternions et translations
|
Le contenu de cette étape est en cours de maintenance. Si vous avez besoin d’informations supplémentaires de toute urgence à propos de cette étape, veuillez consulter Mech-Mind Communauté en ligne. |
Scénario d’utilisation
Une étape générale de décomposition de pose qui fournit des sources de données pour les étapes suivantes qui nécessitent les types de données vecteur de rotation et centre de pose.