Vérifier la précision absolue du robot
Cette section décrit comment vérifier la précision absolue du robot.
Les méthodes pour vérifier la précision absolue sont les suivantes.
Vérifier la position zéro de chaque axe
Reportez-vous aux instructions du fabricant pour vérifier les positions zéro sur le robot utilisé.
Mesurer l’erreur sur la distance de déplacement du robot
Utilisez le boîtier d’enseignement pour commander le robot à se déplacer d’une certaine distance selon une direction fixe (par ex., X ou Y) dans l’espace de travail. Après le déplacement, comparez la distance théorique avec la distance réelle parcourue par le robot et mesurez l’écart.
Par exemple, la distance de déplacement affichée sur le boîtier d’enseignement est de 1000 mm. Cependant, la distance mesurée que le robot a effectivement parcourue est de 998 mm. L’erreur de distance de déplacement du robot est alors de 2 mm.
Vérifier par rotation autour d’un pointeau
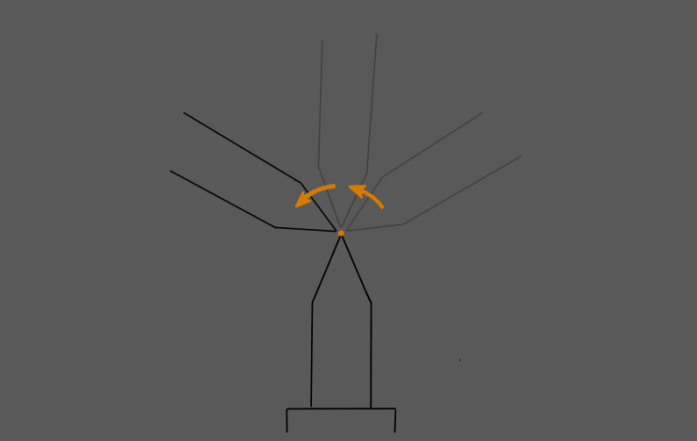
Comme illustré sur la figure ci-dessus, on peut vérifier la précision absolue du robot en faisant tourner le TCP autour d’un pointeau. Les instructions sont les suivantes.
-
Montez un pointeau sur la bride d’extrémité du robot.
-
Saisissez les coordonnées du pointeau actuel sur le boîtier d’enseignement afin de le définir comme le TCP du robot.
-
Montez et fixez un autre pointeau dans l’espace de travail du robot.
-
Déplacez le robot à l’aide du boîtier d’enseignement et faites en sorte que le TCP du robot touche exactement le pointeau dans l’espace de travail.
-
Faites tourner l’extrémité du robot autour du pointeau, vérifiez si les deux pointeaux sont toujours en contact et, si les deux pointeaux s’écartent, enregistrez l’intervalle de fluctuation de la distance.
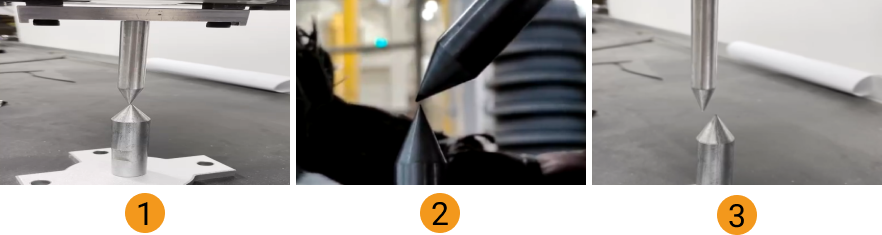
Comme illustré sur la figure ci-dessous, sur la figure 1, le pointeau monté sur la bride du robot coïncide avec un autre pointeau, ce qui indique une bonne précision absolue. Sur la figure 2, le pointeau monté sur la bride du robot s’écarte légèrement d’un autre pointeau, ce qui indique une précision absolue médiocre. Sur la figure 3, le pointeau monté sur la bride du robot s’écarte nettement d’un autre pointeau, ce qui indique une très mauvaise précision absolue.
Autres suggestions de vérification
La précision absolue est le principal facteur influençant la précision de reconnaissance et de prise. Si la précision absolue du robot, telle que déterminée par les étapes précédentes, ne répond pas aux exigences, veuillez d’abord contacter le fabricant du robot pour une correction de précision.
Si le fabricant du robot est incapable de rectifier la précision ou si la précision corrigée ne peut toujours pas répondre aux exigences, envisagez de créer différents modèles de nuage de points à différentes positions ou de déplacer le robot en mode jog pour enregistrer différents points de prise afin de compenser la précision absolue du robot.