Appariement grossier 3D V2
Fonction
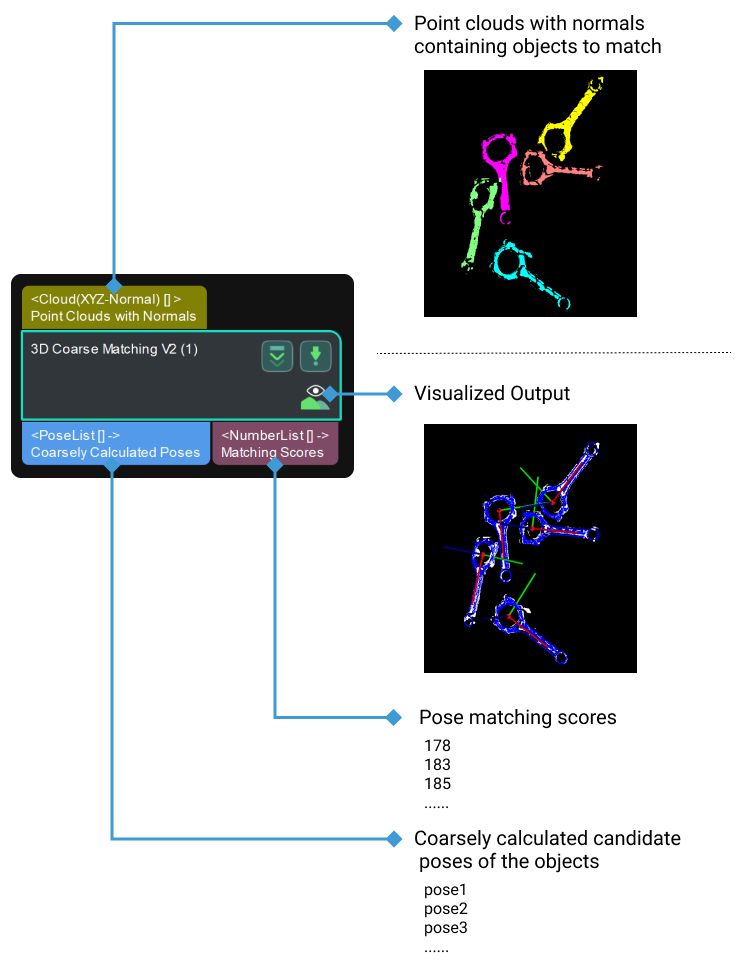
Cette étape apparie grossièrement le modèle de nuage de points avec les nuages de points d’origine et produit les poses candidates des objets cibles calculées de manière grossière.
Scénario d’utilisation
Cette étape est généralement utilisée pour détecter l’objet cible dans le nuage de points de la scène et obtenir des poses candidates approximatives. Cette étape est généralement utilisée conjointement avec l’étape Appariement fin 3D.
Paramètres
Niveau de réglage des paramètres
Description du paramètre : Ce paramètre est utilisé pour sélectionner le niveau de réglage des paramètres pour l’étape.
Valeur par défaut : Basique
Niveau de réglage des paramètres basique
Paramètres du modèle
- Sélection du modèle
-
Description du paramètre : Ce paramètre est utilisé pour sélectionner le fichier de modèle de nuage de points dans la bibliothèque de modèles (project folder/resource/3d_matching).
Instruction de réglage : Après avoir créé un modèle de nuage de points avec éditeur d’objet cible, cliquez sur le bouton à droite du paramètre pour faire apparaître la liste déroulante afin de sélectionner ou de changer le fichier de modèle de nuage de points.
- Méthode d’appariement
-
Description du paramètre : Ce paramètre est utilisé pour sélectionner le mode d’appariement pour l’appariement grossier 3D.
Liste des valeurs : Appariement des arêtes et Appariement des surfaces.
Valeur par défaut : Appariement des arêtes.
Instruction de réglage : Veuillez sélectionner le mode en fonction du modèle de nuage de points utilisé. Si le modèle de nuage de points représente l’arête de la pièce, sélectionnez Appariement des arêtes ; si le modèle de nuage de points représente la surface de la pièce, sélectionnez Appariement des surfaces.
Paramètres de prétraitement
- Calcul automatique du nombre de points attendu
-
Description du paramètre : Ce paramètre est utilisé pour déterminer s’il faut calculer automatiquement le nombre de points du nuage de points sous-échantillonné. Une fois cette option sélectionnée, le nombre de points du nuage de points sous-échantillonné sera calculé automatiquement. Si elle n’est pas activée, vous devez spécifier manuellement « Nombre de points attendu du modèle échantillonné ».
Valeur par défaut : activé.
Recommandation de réglage : Veuillez régler ce paramètre selon vos besoins réels.
- Nombre de points attendu du modèle échantillonné
-
Description du paramètre : Ce paramètre permet de définir le nombre de points attendu dans le modèle de nuage de points après sous-échantillonnage. Plus cette valeur est faible, moins il y a de points dans le nuage de points sous-échantillonné, et plus la précision d’appariement est faible.
Valeur par défaut : 300
Recommandation de réglage : Définissez la valeur selon le besoin réel. Veuillez consulter l’exemple de réglage pour le résultat d’application.
- Seuil supérieur du nombre de points du nuage de points d’entrée échantillonné
-
Description du paramètre : Ce paramètre est utilisé pour définir le nombre maximal de points dans le nuage de points de la scène après sous-échantillonnage. Si le nombre de points dans le nuage de points de la scène après sous-échantillonnage dépasse cette valeur, le nuage de points de la scène sera ignoré et des données vides seront sorties.
Valeur par défaut : 1000000
Recommandation de réglage : Définissez la valeur selon le besoin réel. Veuillez consulter l’exemple de réglage pour le résultat d’application.
Paramètres de vérification de pose
- Nombre attendu de poses détectées par nuage de points d’entrée
-
Description du paramètre : Ce paramètre est utilisé pour définir le nombre attendu de poses appariées pour chaque nuage de points d’entrée.
Valeur par défaut : 3
Recommandation de réglage : Définissez la valeur selon le besoin réel. Veuillez consulter l’exemple de réglage pour le résultat d’application.
Niveau de réglage des paramètres avancé
Paramètres du modèle
- Sélection du modèle
-
Description du paramètre : Ce paramètre est utilisé pour sélectionner le fichier de modèle de nuage de points dans la bibliothèque de modèles (project folder/resource/3d_matching).
Instruction de réglage : Après avoir créé un modèle de nuage de points et ajouté le point de préhension avec modèle d’objet cible, cliquez sur le bouton à droite du paramètre pour faire apparaître la liste déroulante afin de sélectionner ou de changer le fichier de modèle de nuage de points.
- Fichier du modèle
-
Description du paramètre : Ce paramètre est utilisé pour sélectionner le fichier de modèle de nuage de points.
Instruction de réglage : Cliquez sur
 pour sélectionner un fichier de modèle de nuage de points au format PLY.
pour sélectionner un fichier de modèle de nuage de points au format PLY. - Fichier du centre géométrique
-
Description du paramètre : Ce paramètre est utilisé pour sélectionner le fichier du centre géométrique.
Instructions : Cliquez sur
pour sélectionner un fichier de centre géométrique au format JSON.
Méthode d’appariement
Description du paramètre : Ce paramètre est utilisé pour sélectionner le mode d’appariement pour l’appariement grossier 3D.
Liste des valeurs : Appariement des arêtes et Appariement des surfaces.
Valeur par défaut : Appariement des arêtes.
Instruction de réglage : Veuillez sélectionner le mode en fonction du modèle de nuage de points utilisé. Si le modèle de nuage de points représente l’arête de la pièce, sélectionnez Appariement des arêtes ; si le modèle de nuage de points représente la surface de la pièce, sélectionnez Appariement des surfaces.
Paramètres de prétraitement
- Calcul automatique du nombre de points attendu
-
Description du paramètre : Ce paramètre est utilisé pour déterminer s’il faut calculer automatiquement le nombre de points du nuage de points sous-échantillonné. Une fois cette option sélectionnée, le nombre de points du nuage de points sous-échantillonné sera calculé automatiquement. Si elle n’est pas activée, vous devez spécifier manuellement « Nombre de points attendu du modèle échantillonné ».
Valeur par défaut : activé.
Recommandation de réglage : Veuillez régler ce paramètre selon vos besoins réels.
- Nombre de points attendu du modèle échantillonné
-
Description du paramètre : Ce paramètre permet de définir le nombre de points attendu dans le modèle de nuage de points après sous-échantillonnage. Plus cette valeur est faible, moins il y a de points dans le nuage de points sous-échantillonné, et plus la précision d’appariement est faible.
Valeur par défaut : 300
Recommandation de réglage : Définissez la valeur selon le besoin réel. Veuillez consulter l’exemple de réglage pour le résultat d’application.
- Seuil supérieur du nombre de points du nuage de points d’entrée échantillonné
-
Description du paramètre : Ce paramètre est utilisé pour définir le nombre maximal de points dans le nuage de points de la scène après sous-échantillonnage. Si le nombre de points dans le nuage de points de la scène après sous-échantillonnage dépasse cette valeur, le nuage de points de la scène sera ignoré et des données vides seront sorties.
Valeur par défaut : 1000000
Recommandation de réglage : Définissez la valeur selon le besoin réel. Veuillez consulter l’exemple de réglage pour le résultat d’application.
- Nombre de points voisins
-
Description du paramètre : Ce paramètre est utilisé pour définir le nombre de points voisins pour calculer l’orientation de chaque point. Ce paramètre n’est disponible qu’en mode Appariement des arêtes.
Plage de valeurs : 1–100
Valeur par défaut : 30
Paramètres de vote
- Limite supérieure du nombre de paires de points par caractéristique
-
Description du paramètre : Ce paramètre spécifie la limite supérieure du nombre de paires de points contenues dans chaque caractéristique lors de l’analyse du modèle. Plus cette valeur est faible, plus l’exécution sera rapide, mais la précision est aussi plus faible.
Valeur par défaut : 50
- Quantification de la distance
-
Description du paramètre : Ce paramètre est utilisé pour quantifier la distance entre les points dans le nuage de points de l’objet. Intervalle de distance = Quantification de la distance × Pas d’échantillonnage. Plus cette valeur est grande, moins le résultat d’appariement a tendance à être précis.
Valeur par défaut : 1.0000
- Quantification de l’angle
-
Description du paramètre : Ce paramètre est utilisé pour quantifier l’angle entre les normales des points dans le nuage de points de l’objet. Intervalle d’angle = 360°/Quantification de l’angle. Plus cette valeur est grande, plus l’intervalle d’angle sera petit, et donc plus la précision du résultat d’appariement est élevée, mais un nuage de points de meilleure qualité est requis.
Valeur par défaut : 60
- Seuil inférieur du taux de vote
-
Description du paramètre : Les poses dont les scores sont supérieurs à « Score le plus élevé dans le vote × Seuil inférieur du taux de vote » passeront à la vérification de pose. Plus cette valeur est basse, plus de poses sont utilisées pour la vérification de pose, et donc plus il est probable de trouver une correspondance exacte, mais l’étape prendra également plus de temps à s’exécuter.
Valeur par défaut : 0.80
- Pas d’échantillonnage du point de référence
-
Description du paramètre : Ce paramètre est utilisé pour ajuster la taille du pas afin de sous-échantillonner le point de référence. Le pas prend un point d’échantillonnage à intervalle à partir du nuage de points. Lorsque la valeur est plus grande, les points d’échantillonnage à intervalle sont moins nombreux, la vitesse d’exécution est plus rapide, mais la précision d’appariement est réduite.
Valeur par défaut : 5
- Pas d’échantillonnage du point référé
-
Instruction : Ce paramètre est utilisé pour ajuster la taille du pas afin de sous-échantillonner le point référé. Le pas prend un point d’échantillonnage à intervalle à partir du nuage de points. Lorsque la valeur est plus grande, les points d’échantillonnage à intervalle sont moins nombreux, la vitesse d’exécution est plus rapide, mais la précision d’appariement est réduite.
Valeur par défaut : 1
Un point de référence et un point référé constituent une paire de points. Plus le pas d’échantillonnage est grand, moins il y a de points de référence et de points référés après le sous-échantillonnage, plus le nombre de paires de points est réduit, et plus l’exécution est rapide. |
Paramètres de filtrage de pose
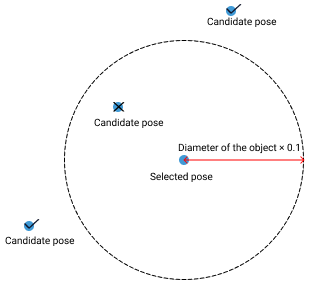
- Utiliser NMS par distance
-
Description du paramètre : Après activation de cette fonction, les poses candidates dont les distances aux poses sélectionnées sont inférieures à 0,1 fois le diamètre de l’objet seront filtrées.
Valeur par défaut : activé.
Instruction de réglage : Veuillez consulter l’exemple de réglage pour le résultat d’application.
- Filtrer les poses selon l’angle de rotation du modèle
-
Instruction : En mode Appariement des arêtes, le modèle de nuage de points peut nécessiter une rotation d’un certain angle pour correspondre au nuage de points de la scène, et les poses seront filtrées selon l’angle de rotation du modèle de nuage de points. Lorsque l’angle de rotation du modèle dépasse le seuil supérieur de différence d’angle, la pose sera filtrée.
Valeur par défaut : activé.
- Seuil supérieur de différence d’angle
-
Instruction : Voir l’infobulle de Filtrer les poses selon l’angle de rotation du modèle.
Valeur par défaut : 135.000°
Paramètres de vérification de pose
- Nombre attendu de poses détectées par nuage de points d’entrée
-
Description du paramètre : Ce paramètre est utilisé pour définir le nombre attendu de poses appariées pour chaque nuage de points d’entrée.
Valeur par défaut : 3
Recommandation de réglage : Définissez la valeur selon le besoin réel. Veuillez consulter l’exemple de réglage pour le résultat d’application.
- Stratégie de génération de la longueur de voxel
-
Description du paramètre : Ce paramètre est utilisé pour sélectionner la stratégie de génération de la longueur de voxel.
Liste des valeurs : Automatique et Manuel.
Valeur par défaut : Automatique
Recommandation de réglage : Automatique est recommandé pour les nouveaux utilisateurs. Si Manuel est sélectionné, vous devrez définir la Longueur de voxel.
- Limite inférieure de la longueur de voxel
-
Description du paramètre : Ce paramètre est utilisé pour définir la longueur minimale du voxel en millimètres. Valeur par défaut : 1.000 mm
- Limite supérieure de la longueur de voxel
-
Description du paramètre : Ce paramètre est utilisé pour définir la longueur maximale du voxel en millimètres. Valeur par défaut : 15.000 mm
|
Si vous divisez l’espace occupé par le nuage de points en une grille 3D, chaque cube minimal de cette grille est un voxel. Longueur de voxel est la longueur de l’arête du cube. |
Visualisation des résultats
- Options de visualisation
-
Description du paramètre : Ce paramètre est utilisé pour sélectionner l’élément que vous souhaitez visualiser.
Liste des valeurs : Modèle échantillonné, Scène échantillonnée, Résultat du recalage, and Points utilisés pour la vérification de pose.
Valeur par défaut : Résultat du recalage.
Instruction de réglage : Définissez la valeur selon le besoin réel. Veuillez consulter l’exemple de réglage pour le résultat d’application.
Exemples de réglage
Exemples au niveau de réglage basique des paramètres
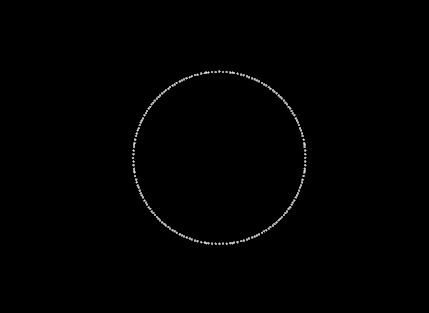
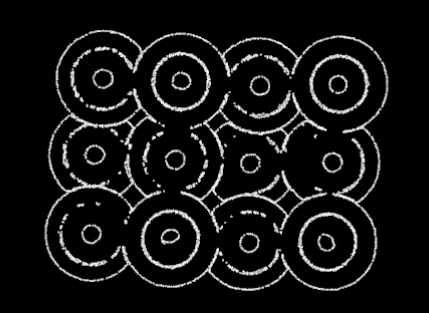
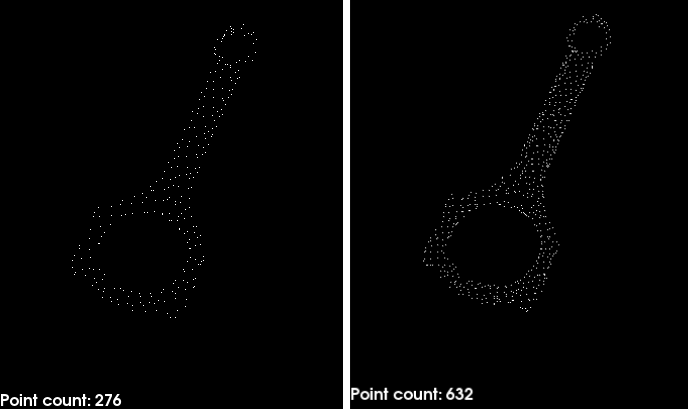
Nombre de points attendu du modèle échantillonné
Dans le cas d’un projet de prise de bielle, lorsque le Nombre de points attendu du modèle échantillonné est réglé à 300 et 600, les modèles de nuage de points correspondants après sous-échantillonnage sont montrés respectivement sur les figures de gauche et de droite ci-dessous.
Comme on peut le voir sur les figures, les points du nuage de points de gauche sont clairsemés tandis que les points du nuage de points de droite sont denses.
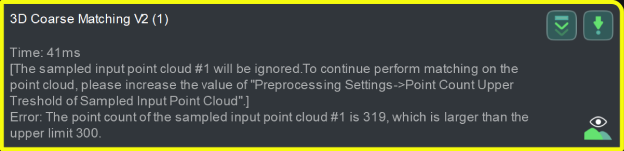
Seuil supérieur du nombre de points du nuage de points d’entrée échantillonné
Lorsque le nombre de points dans le nuage de points d’entrée dépasse la valeur définie, un message comme ci-dessous apparaît.
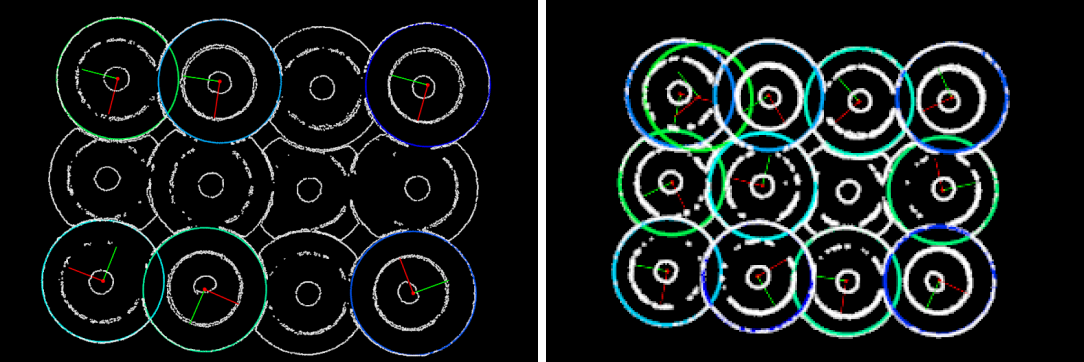
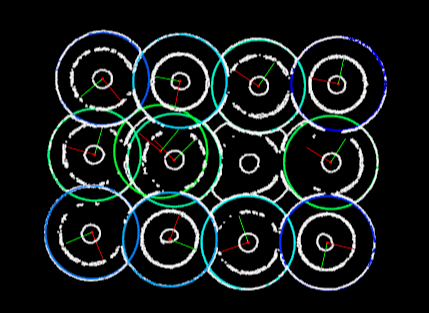
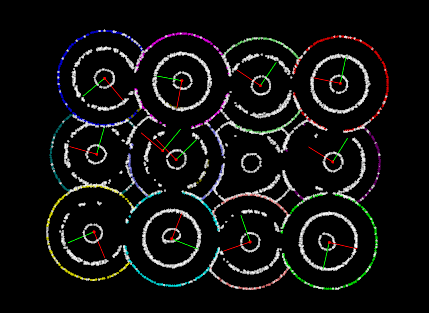
Nombre attendu de poses détectées par nuage de points d’entrée
Lorsque le Nombre attendu de poses détectées par nuage de points d’entrée est réglé à 6 et 12, les nombres de résultats de pose produits par cette étape sont présentés respectivement sur les figures de gauche et de droite ci-dessous.
Il y a 6 résultats de pose dans la figure de gauche tandis qu’il y a 12 résultats de pose dans la figure de droite.