Branchement par étiquette
Fonction
Branchement par étiquette doit être utilisé conjointement avec Définir l’étiquette pour la branche. Vous pouvez définir des étiquettes dans le flux de travail, puis sélectionner différentes sorties de branche selon les étiquettes dans le flux de travail ultérieur.
| Les projets d’exemple de l’Étape « Définir une étiquette pour le branchement » et de l’Étape « Branchement par étiquette » sont fournis pour vous aider à mieux comprendre les étiquettes de branchement. Pour le projet d’exemple, vous pouvez aller dans Fichier > Nouveau > Projets d’exemple > Autres > Branchement avec des étiquettes dans le logiciel. |
Description des paramètres
Nombre de ports de sortie
Utilisé pour définir le nombre de ports de sortie de l’Étape. Ce paramètre doit être défini en se référant au paramètre Étiquette de l’Étape « Définir une étiquette pour le branchement ».
Le nombre d’Étapes « Définir une étiquette pour le branchement » doit être identique à la valeur de « Nombre de ports de sortie ». Si deux Étapes « Définir une étiquette pour le branchement » sont utilisées, le « Nombre de ports de sortie » doit être réglé sur 2. L’étiquette de branche 1 correspond à la Sortie 0 de l’Étape « Branchement par étiquette », l’étiquette de branche 2 correspond à la Sortie 1 de l’Étape « Branchement par étiquette », et ainsi de suite.
Exemples d’application
Exemple 1
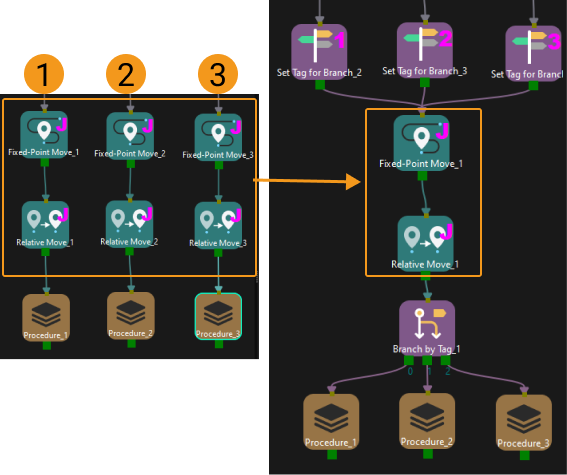
Dans l’exemple suivant,
Dans les trois branches (①, ②, ③), il y a des Étapes identiques (Déplacement en point fixe, Déplacement relatif) avec des réglages de paramètres identiques. Par conséquent, l’Étape « Définir une étiquette pour le branchement » peut être utilisée pour étiqueter chacune des trois branches séparément. Ensuite, un seul ensemble de Déplacement en point fixe et Déplacement relatif peut être appliqué, puis « Branchement par étiquette » est utilisé pour revenir vers différentes branches.
Exemple 2
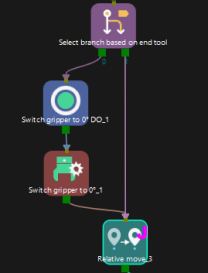
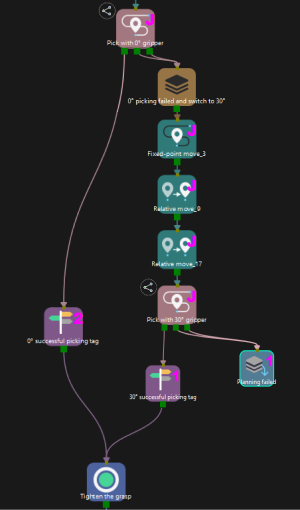
Dans le projet d’exemple « Branchement par étiquette », le robot tentera de saisir l’objet cible en utilisant deux outils à des angles différents. Lors du dépôt de l’objet cible, il est nécessaire de revenir à l’angle de 0°.
-
Pendant le processus de préhension, le flux de travail de saisie de l’objet cible avec l’outil à 30° est étiqueté 1, et le flux de travail de saisie de l’objet cible avec l’outil à 0° est étiqueté 2.
-
Pendant le processus de pose, l’Étape « Branchement par étiquette » détermine s’il est nécessaire d’ajuster la pose de l’outil en fonction des étiquettes du flux de travail précédent, c’est-à-dire de ramener l’outil de 30° à 0°.