Vérifier les paramètres DH du robot
Lorsque les données de pose échangées entre le robot et le système de vision sont sous forme de positions articulaires, la justesse des paramètres DH affecte la précision absolue du robot. Cette section présente les paramètres DH du robot et la manière de les vérifier.
Introduction aux paramètres DH
Les paramètres DH d’un robot servent à décrire les caractéristiques de ses articulations et de ses maillons. Ces paramètres nous aident à connaître les caractéristiques géométriques et dynamiques du robot et donc à mieux contrôler son mouvement.
Grâce à ces paramètres, nous pouvons connaître la forme et les dimensions du robot et déterminer sa position et son orientation pour différents angles articulaires.
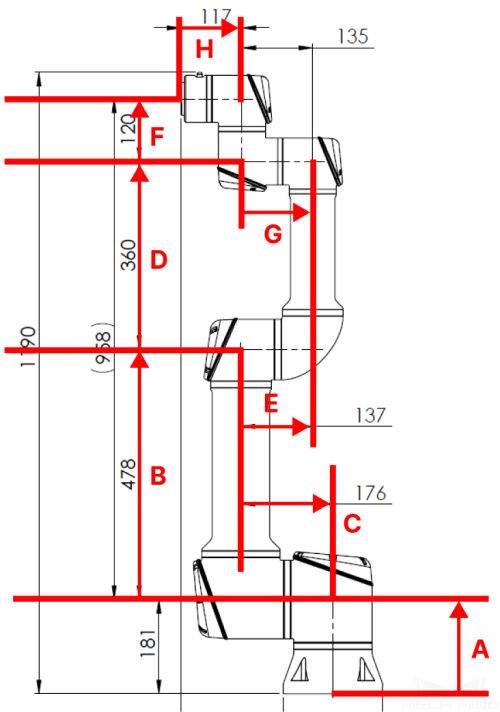
À titre d’exemple, les paramètres DH d’un robot collaboratif à six axes (similaire à l’UR5) sont présentés ci-dessous.
Scénarios d’utilisation des paramètres DH
Dans certains scénarios de préhension, on utilisera les paramètres DH du robot, par exemple :
-
Calibration main-œil (communication maître-contrôle) pour certains robots.
-
Scénarios EIH qui ne reçoivent que les positions articulaires du robot.
-
Envoyer au robot les positions articulaires d’un point de passage.
Vérifier les paramètres DH
Lorsque les données de pose échangées entre le robot et le système de vision sont sous forme de positions articulaires et que les paramètres DH du robot réel ne correspondent pas à ceux du robot simulé, cela introduit une erreur de précision du robot. Vous devez alors vérifier les paramètres DH du robot. Les étapes sont les suivantes :
-
Consultez le manuel d’utilisation du robot pour voir les paramètres DH du robot réel.
-
Référez-vous à la bibliothèque de modèles de robots pour voir les paramètres DH du robot simulé.
-
Comparez les paramètres DH du robot réel et du robot simulé. S’ils ne sont pas cohérents, veuillez modifier le fichier [robot]_algo.json.
Veuillez consulter Guide de vérification des paramètres du modèle de robot pour plus de détails.