Estimation des arêtes du nuage de points par méthode 3D
Scénario d’utilisation
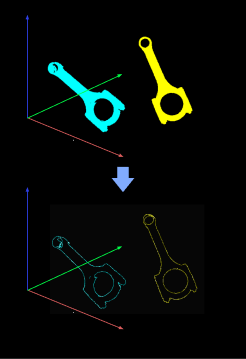
Cette étape est généralement utilisée pour l’appariement de nuages de points basé sur les arêtes.
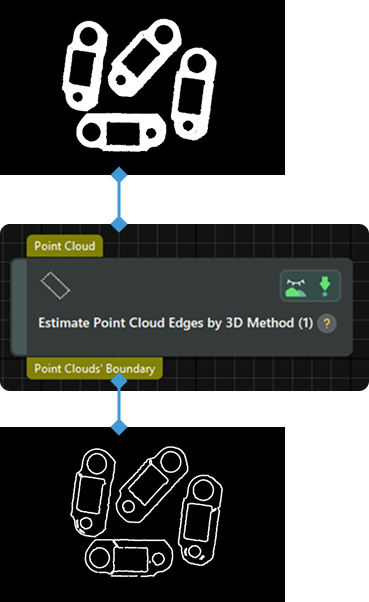
Extraire les arêtes du nuage de points
Le flux de travail de cette étape est le suivant:
-
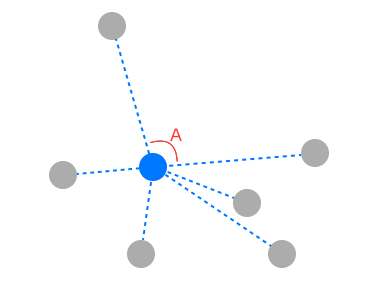
Recherchez plusieurs points voisins autour d’un point donné en utilisant le Type de recherche du plus proche voisin spécifié, et reliez ce point aux autres points.
-
Comparez l’angle maximal formé par des segments adjacents avec le Seuil d’angle défini. Si l’angle maximal dépasse le Seuil d’angle, le point est considéré comme un point d’arête.
Comme indiqué sur la figure ci-dessous, le point bleu est un point dans l’espace et les points gris sont les points voisins trouvés. Dans ce cas, le Seuil d’angle est réglé sur 90°. ∠A est l’angle maximal formé par les segments de connexion adjacents et, si ∠A > 90°, le point bleu est considéré comme un point d’arête.
Les sections suivantes décrivent les paramètres liés au processus ci-dessus.
Description des paramètres
Paramètres de détermination des arêtes
- Seuil d’angle
-
Description : Ce paramètre sert à déterminer si un point donné est un point d’arête. Si l’angle maximal formé par deux segments adjacents parmi les connexions entre le point et plusieurs points recherchés dépasse cette valeur, le point sera considéré comme un point d’arête.
Valeur par défaut : 90°
Recommandation de réglage : il est recommandé d’utiliser la valeur par défaut.
Paramètres de recherche des voisins
- Type de recherche du plus proche voisin
-
Description : Ce paramètre permet de sélectionner la méthode de recherche des points voisins.
Liste des valeurs : KNN, Radius
-
KNN : Une recherche des K plus proches voisins (KNN) est utilisée pour trouver les K points les plus proches d’un point donné dans l’espace. Après avoir sélectionné cette méthode, vous devez définir le paramètre Nombre de recherche pour déterminer la valeur de K. Il est recommandé d’utiliser la valeur par défaut de 20. Cette méthode est plus rapide pour calculer les arêtes d’un nuage de points.
-
Radius : Une recherche de voisinage basée sur un rayon est utilisée pour trouver des points dans un certain rayon à partir d’un point donné dans l’espace. Après avoir sélectionné cette méthode, vous devez définir le paramètre Rayon de recherche pour préciser la plage de recherche. Il est recommandé d’utiliser la valeur par défaut de 5.000 mm.
Valeur par défaut : KNN
Recommandation de réglage : il est recommandé d’utiliser la valeur par défaut.
-