Classer
Description de la fonction
Effectuer une classification automatique avant l’étape Déplacement visuel ou sélectionner une branche en fonction des informations de l’objet cible tenu pendant l’exécution de l’étape.
Scénario d’utilisation
Cette étape est utilisée pour la planification de trajectoire basée sur les informations de l’objet cible.
|
Les « informations sur l’objet cible » comprennent le nom de l’objet cible, le nom du point de préhension et l’étiquette du point de préhension. |
Description des paramètres
Cette étape propose deux modes d’utilisation : Classification automatique avant « Déplacement visuel » et Sélection de la branche selon l’objet cible tenu.
Cliquer pour afficher la description détaillée des autres paramètres lorsque Classification automatique avant « Déplacement visuel » est sélectionnée
Lorsque l’étape « Classify » précède l’étape Déplacement visuel, veuillez sélectionner cette option. Lorsque cette option est sélectionnée, les étapes susceptibles d’interrompre la planification de trajectoire ne sont pas autorisées entre l’étape « Classify » et l’étape Déplacement visuel.
Sélectionner le nom de l’étape
Sélectionnez l’étape Déplacement visuel utilisée conjointement.
Sélection de la branche selon
Lorsque Noms de l’objet cible et du point de préhension est sélectionné, l’étape classera en fonction des noms des objets cibles et des points de préhension définis dans l’éditeur d’objet cible.
Lorsque Étiquette du point de préhension est sélectionnée, l’étape classera en fonction de l’étiquette d’apprentissage profond ou de l’étiquette numérique définie dans l’éditeur d’objet cible.
| Classer par « Noms de l’objet cible et du point de préhension » | Classer par « Étiquette du point de préhension » |
|---|---|
|
|
Tri des données
Ce paramètre n’est disponible que lorsque l’étape Classification automatique avant « Déplacement visuel » est sélectionnée. Il définit l’ordre du résultat classé utilisé pour la planification de trajectoire.
Ordre des points de préhension |
L’étape « Classify » appliquera, sur la base de l’ordre des points de préhension présenté dans les résultats de vision, ces points séquentiellement pour la planification suivante. Si l’ordre des points de préhension dans le résultat de vision est 1-C, 2-A et 3-B, alors l’ordre de planification est 1-C, 2-A et 3-B. |
Ordre des ports de sortie |
L’étape « Classify » utilisera les points de préhension selon l’ordre des ports de sortie de l’étape actuelle (de gauche à droite). Si l’ordre des points de préhension dans le résultat de vision est 1-C, 2-C, 3-A, 4-B, 5-A et 6-B, et que les noms de points de préhension correspondant aux ports de sortie de l’étape actuelle, de gauche à droite, sont A, B et C, alors l’ordre de planification est 3-A, 5-A, 4-B, 6-B, 1-C et 2-C. |
| Dans l’exemple ci-dessus, les lettres représentent les noms de l’objet cible et du point de préhension ou l'étiquette du point de préhension, et les chiffres représentent leur ordre dans les résultats de vision. |
Étiquettes
-
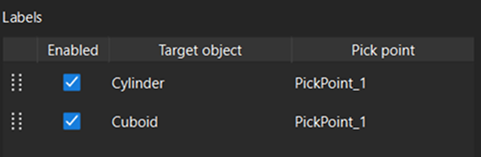
Lorsque Sélection de la branche selon est défini sur Noms de l’objet cible et du point de préhension, les objets cibles et leurs points de préhension seront automatiquement affichés dans cette zone. Si vous désélectionnez En usagepour certains points de préhension et leur objet cible correspondant, le nombre de ports de sortie de l’étape « Classify » diminuera en conséquence.
-
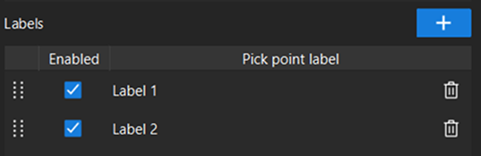
Lorsque Sélection de la branche selon est défini sur Étiquette du point de préhension, vous pouvez ajouter des étiquettes personnalisées. Les étiquettes ajoutées ici doivent correspondre à l’étiquette d’apprentissage profond ou à l’étiquette numérique définie dans l’éditeur d’objet cible. Si vous désélectionnez En usage pour certaines étiquettes de points de préhension, le nombre de ports de sortie de l’étape « Classify » diminuera en conséquence.
Ajouter des étiquettes Cliquez sur le bouton
 pour ajouter des étiquettes.
pour ajouter des étiquettes.Personnaliser les noms d’étiquettes Double-cliquez sur le nom de l’étiquette sous Étiquette du point de préhension pour le modifier.
Supprimer des étiquettes Cliquez sur
 sur le côté droit de l’entrée pour supprimer l’étiquette sélectionnée.
sur le côté droit de l’entrée pour supprimer l’étiquette sélectionnée.Ajuster l’ordre des étiquettes Faites glisser
 sur le côté gauche de chaque entrée pour ajuster l’ordre, et l’ordre des ports de sortie changera également en conséquence.
sur le côté gauche de chaque entrée pour ajuster l’ordre, et l’ordre des ports de sortie changera également en conséquence.
| Si les points de préhension sont planifiés selon l'ordre des ports de sortie, l’ajustement de l’ordre des étiquettes modifiera également l’ordre de planification. |
Cliquer pour afficher la description détaillée des autres paramètres lorsque Sélection de la branche selon l’objet cible tenu est sélectionnée
Lorsque cette option est sélectionnée, le logiciel choisira la branche à suivre en fonction des informations de l’objet cible tenu pendant l’exécution de l’étape « Classify ».
Sélection de la branche selon
Lorsque Noms de l’objet cible et du point de préhension est sélectionné, l’étape classera en fonction des noms des objets cibles et des points de préhension définis dans l’éditeur d’objet cible.
Lorsque Étiquette du point de préhension est sélectionnée, l’étape classera en fonction de l’étiquette d’apprentissage profond ou de l’étiquette numérique définie dans l’éditeur d’objet cible.
| Classer par « Noms de l’objet cible et du point de préhension » | Classer par « Étiquette du point de préhension » |
|---|---|
|
|
Étiquettes
-
Lorsque Sélection de la branche selon est défini sur Noms de l’objet cible et du point de préhension, les objets cibles et leurs points de préhension seront automatiquement affichés dans cette zone. Si vous désélectionnez En usagepour certains points de préhension et leur objet cible correspondant, le nombre de ports de sortie de l’étape « Classify » diminuera en conséquence.
-
Lorsque Sélection de la branche selon est défini sur Étiquette du point de préhension, vous pouvez ajouter des étiquettes personnalisées. Les étiquettes ajoutées ici doivent correspondre à l’étiquette d’apprentissage profond ou à l’étiquette numérique définie dans l’éditeur d’objet cible. Si vous désélectionnez En usage pour certaines étiquettes de points de préhension, le nombre de ports de sortie de l’étape « Classify » diminuera en conséquence.
Ajouter des étiquettes Cliquez sur le bouton
pour ajouter des étiquettes.Personnaliser les noms d’étiquettes Double-cliquez sur le nom de l’étiquette sous Étiquette du point de préhension pour le modifier.
Supprimer des étiquettes Cliquez sur
sur le côté droit de l’entrée pour supprimer l’étiquette sélectionnée.Ajuster l’ordre des étiquettes Faites glisser
sur le côté gauche de chaque entrée pour ajuster l’ordre, et l’ordre des ports de sortie changera également en conséquence.
Exemple d’application
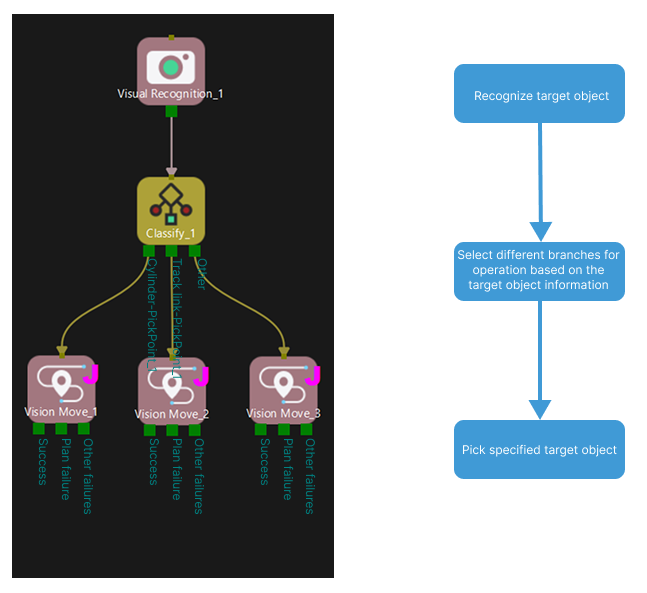
Changer la pince pour saisir différents objets cibles
L’étape « Classify » est utilisée avant l’étape Déplacement visuel pour changer la pince afin de saisir différents objets cibles.
La logique générale du flux de travail est : reconnaître l’objet cible > sélectionner différentes branches d’opération en fonction des informations de l’objet cible > saisir l’objet cible spécifié, comme illustré ci-dessous.
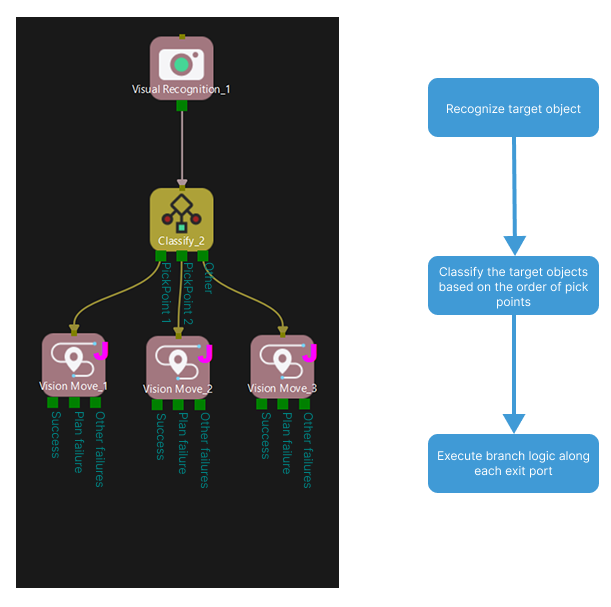
Planifier la trajectoire selon l’ordre des points de préhension
L’étape « Classify » est utilisée avant l’étape Déplacement visuel pour classer les objets cibles et planifier la trajectoire séquentiellement selon l’ordre des points de préhension dans le résultat de vision.
La logique générale du flux de travail est : reconnaître l’objet cible > classer les objets cibles selon l’ordre des points de préhension > exécuter la logique de branche le long de chaque port de sortie.
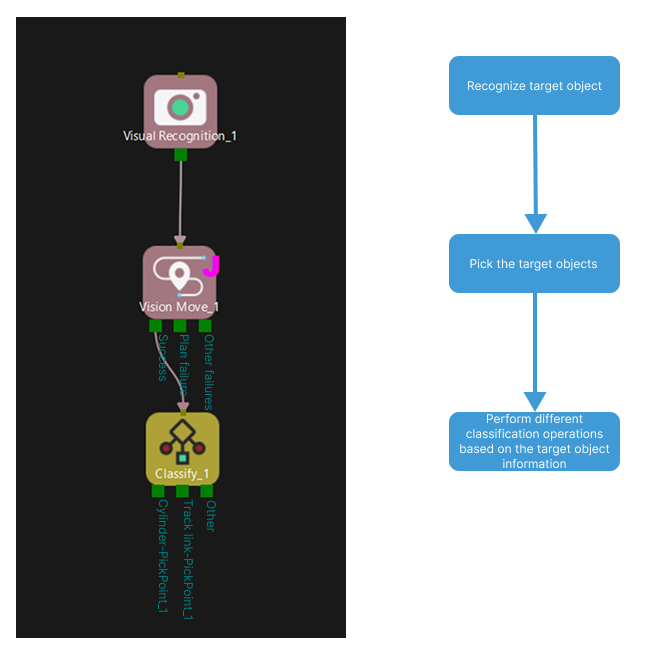
Classer l’objet cible et le déposer dans différents bacs
L’étape « Classify » est utilisée après l’étape Déplacement visuel pour classer l’objet cible et le déposer dans différents bacs en utilisant la même pince.
La logique générale du flux de travail est : reconnaître l’objet cible > saisir les objets cibles > effectuer différentes opérations de classification en fonction des informations de l’objet cible, comme illustré ci-dessous.