Chemin intelligent dans le bac
Présentation du projet
Cet exemple montre comment utiliser l’Étape Chemin intelligent dans le bac pour saisir des tubes cylindriques empilés aléatoirement dans un bac profond. En se basant sur les informations du bac et des modèles d’objets cibles, Mech-Viz génère automatiquement une trajectoire permettant au robot d’entrer dans le bac, de saisir l’objet cible, puis de sortir du bac, en évitant efficacement les collisions.
Le résultat de l’opération est le suivant:
Scénario d’application
Il convient à la préhension d’objets cibles soigneusement disposés ou empilés aléatoirement dans un bac profond ou peu profond.
| Objets cibles dans un bac peu profond | Objets cibles dans un bac profond |
|---|---|
|
|


Description du flux de travail
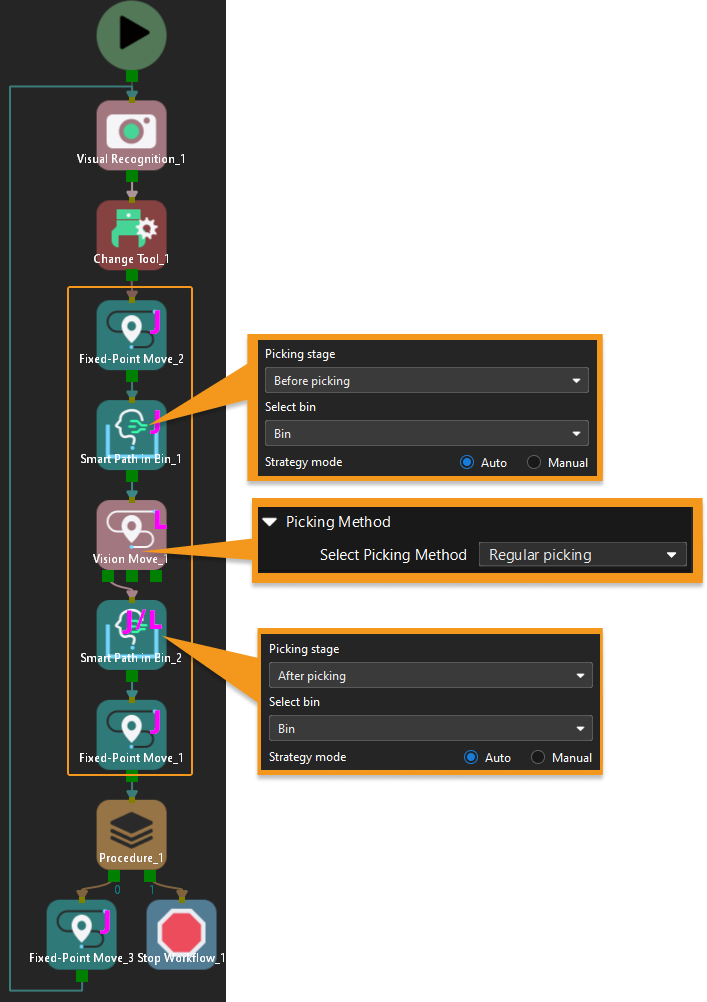
Le paradigme du projet avec l’Étape Chemin intelligent dans le bac est illustré dans la figure ci-dessous.
Les points suivants doivent être pris en compte lors de la construction du projet:
-
L’Étape Chemin intelligent dans le bac doit être ajoutée pour les trajectoires d’entrée et de sortie du bac, et l’Étape Planification de trajectoire intelligente dans le bac doit être adjacente à l’Étape Déplacement visuel.
-
La Méthode de préhension définie dans l’Étape Déplacement visuel doit être Préhension normale.
-
L’Étape Chemin intelligent dans le bac ne peut pas être placée à la fin du flux de travail. Elle doit être suivie d’une Étape de type déplacement avec un point de passage fixe.
-
Chaque Étape Chemin intelligent dans le bac correspond à deux points de passage. Lorsque la Phase de préhension est définie sur Avant la préhension, les points de passage correspondants sont Point d’approche et Point d’entrée dans le bac. Lorsque laPhase de préhension est définie sur Après la préhension, les points de passage correspondants sont Point de retrait et Point de sortie du bac. Lors de l’écriture du programme de communication du robot, il est important de recevoir les deux points de passage. Veuillez vous référer à Programme d’exemple pour une description détaillée.
-
Lorsque la Phase de préhension est définie sur Avant la préhension, l’Étape Chemin intelligent dans le bac doit être adjacente à l’Étape Déplacement visuel, et l’Étape Chemin intelligent dans le bac doit être placée avant l’Étape Déplacement visuel.
Description des paramètres
-
La Chemin intelligent dans le bac Étape
Phase de préhension: Pour l’Étape Chemin intelligent dans le bac avant l’Étape Déplacement visuel, sa Phase de préhension doit être définie sur Avant la préhension, tandis que pour l’Étape Chemin intelligent dans le bac après l’Étape Déplacement visuel, sa Phase de préhension doit être définie sur Après la préhension.
Sélectionner le bac: Sélectionnez le modèle de scène de type Bac ajouté dans Objets de scène de l’arborescence des ressources du projet. Si la pose ou les dimensions du bac sont définies de manière incorrecte, ou si le mauvais bac est sélectionné, cela peut conduire à des échecs de planification de trajectoire, voire à des collisions pendant le processus de préhension.
Mode de stratégie: Voir Mode de stratégie pour une présentation détaillée.
-
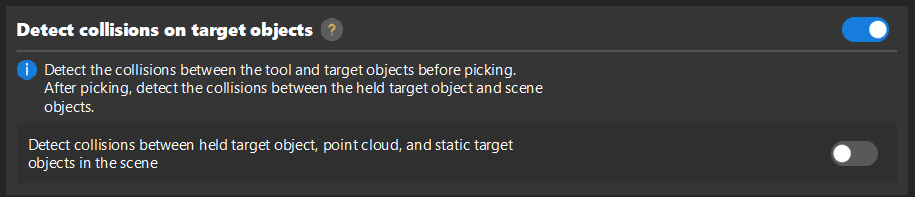
Configuration des paramètres de détection de collisions
Lorsque vous utilisez l’Étape Chemin intelligent dans le bac, vous devez activer Détecter les collisions sur les objets cibles dans le Collisions panneau fonctionnel. Pour plus d’instructions sur l’ajustement des paramètres de détection de collisions, reportez-vous à Configuration des paramètres de détection de collisions.
Notes
Pour appliquer cet exemple en production réelle, vous pouvez modifier et configurer le projet conformément aux notes suivantes afin de le mettre rapidement en service.
-
Fermez les enregistrements de vision et appelez le projet Mech-Vision correspondant pour obtenir des résultats de vision via l’Étape Reconnaissance visuelle.
-
Configurez des modèles pour objets de scène et outils.
-
Configurez les paramètres dans le Collisions panneau fonctionnel.