Configurer la communication UDP
Cette section explique comment configurer la communication UDP. Avant la configuration, veuillez confirmer que vous avez déjà sélectionné le robot et que vous êtes entré dans l’interface de configuration de la communication.
-
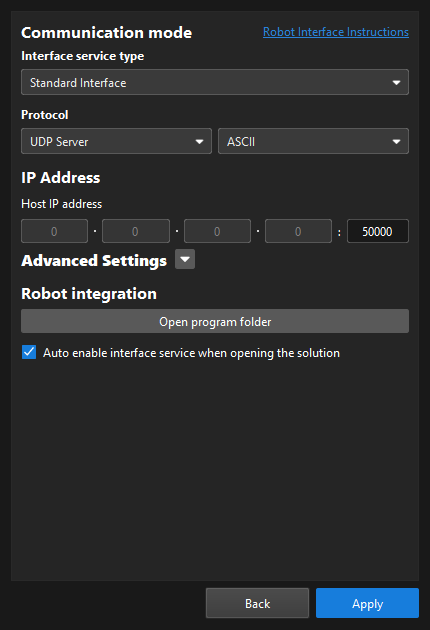
Dans la section Mode de communication, définissez le paramètre « Type de service d’interface » sur Interface standard, définissez le paramètre « Protocole » sur Serveur UDP, et définissez le format de transmission des données en fonction de la prise en charge de HEX et ASCII.
-
Dans la section Adresse IP, saisissez le numéro de port de l’hôte.
Le numéro de port doit être défini sur 50000 ou supérieur.
-
(Optionnel) Dans la section Paramètres avancés, configurez les paramètres selon vos besoins.
-
Nombre maximal de poses à envoyer à chaque fois: Lorsque vous utilisez la commande d’exécution du projet Mech-Vision, vous pouvez définir le nombre maximal de poses que le système de vision peut envoyer à chaque fois. Le nombre maximal est 30.
-
Délai d’attente pour l’obtention des données Mech-Viz (s): Si vous utilisez la commande d’exécution du projet Mech-Viz et que Mech-Viz ne renvoie pas le résultat pendant la période de délai spécifiée, un code d’erreur de dépassement de délai sera renvoyé.
-
Délai d’attente pour l’obtention des données Mech-Vision (s): Si vous utilisez la commande d’exécution du projet Mech-Vision et que Mech-Vision ne renvoie pas le résultat pendant la période de délai spécifiée, un code d’erreur de dépassement de délai sera renvoyé.
-
Retourner «1102:Déclenchement réussi» après la capture: Dans des scénarios œil-en-main, si vous sélectionnez cette option, le système de vision renverra «1102:Déclenchement réussi» après que la caméra a terminé la capture d’image. De cette façon, le robot peut se déplacer immédiatement sans attendre la fin de l’exécution du projet Mech-Vision, ce qui réduit le temps de cycle. Si vous ne sélectionnez pas cette option, le robot doit attendre l’arrêt de l’exécution du projet Mech-Vision avant de se déplacer.
Après avoir sélectionné cette option, Délai d’attente de fin de capture (s) sera affiché. Si la caméra a besoin d’une période relativement longue pour capturer l’image, spécifiez un délai d’attente plus long. -
Configuration des propriétés: Cliquer sur ce bouton ouvrira le fichier roperty_config.txt. Lorsque vous exécutez la commande de lecture de la valeur du paramètre d’étape Mech-Viz ou la commande de définition de la valeur du paramètre d’étape Mech-Viz, vous devez utiliser ce fichier pour définir l’ID de l’étape ou le paramètre d’étape.
-
Réinitialiser: Réinitialise les éléments de configuration précédents (sauf Configuration des propriétés) aux valeurs par défaut.
-
-
(Optionnel) Sélectionnez Activer automatiquement le service d’interface lors de l’ouverture de la solution. À l’ouverture de la solution, vous n’avez pas besoin de démarrer le service d’interface manuellement.
-
Cliquez sur le bouton Appliquer.
Ensuite, vous devez compléter la configuration de l’interface standard restante en fonction de l’objet de communication.