Reconnaissance d’objet cible en 3D
Fonction
Cette étape intègre des fonctions de traitement de vision telles que le prétraitement de nuages de points, l’apprentissage profond et la suppression des objets chevauchés, ce qui facilite une reconnaissance rapide des objets cibles.
Scénario d’utilisation
Cette étape convient aux scénarios de chargement de pièces. Elle est capable de reconnaître des pièces de diverses formes et méthodes d’empilage, y compris des dispositions séparées, un empilage ordonné en monocouche, un empilage ordonné en multicouche et un empilage aléatoire. Cette étape suit généralement l’étape Capturer des images depuis la caméra.
Entrée et sortie
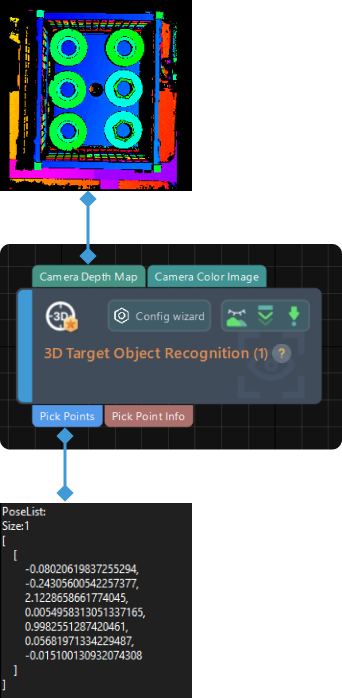
|
Après avoir sélectionné « Déclencher le flux de contrôle en l’absence de sortie » pour l’étape « Reconnaissance d’objet cible en 3D », le flux de contrôle sera tout de même déclenché même si la sortie de l’étape est vide. Remarque:
|
Description des paramètres
- Assistant de configuration
-
Description: Ce paramètre est l’entrée de l’outil « Reconnaissance d’objet cible en 3D ».
Instruction: Cliquez sur Assistant de configuration pour ouvrir l’outil « Reconnaissance d’objet cible en 3D ». Reportez-vous à Présentation de l’interface utilisateur pour la présentation de l’interface utilisateur. Reportez-vous à « Reconnaissance d’objet cible en 3D » pour des instructions détaillées.
Vous pouvez également cliquer sur le bouton Assistant de configuration sur le bloc de l’étape pour ouvrir l’outil « Reconnaissance d’objet cible en 3D ».
- Sélectionner l’objet cible
-
Description: Sélectionnez un objet cible à reconnaître dans la liste déroulante. L’objet cible doit être ajouté au préalable via l’assistant de configuration.