Calculer les normales du nuage de points et le filtrer
|
Le contenu de cette étape est en cours de maintenance. Si vous avez besoin d’informations supplémentaires sur cette étape de toute urgence, veuillez visiter Communauté en ligne de Mech-Mind. |
Fonction
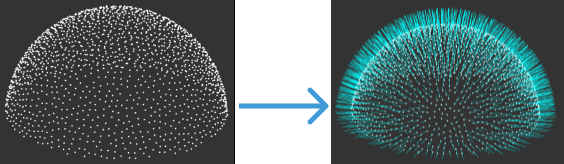
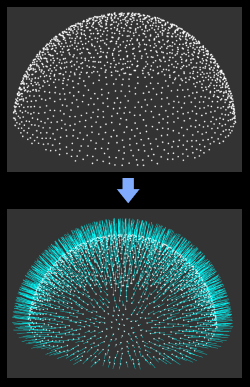
Cette étape est utilisée pour calculer les normales du nuage de points et supprimer les points aberrants.
Scénario d’utilisation
Cette étape permet d’ajouter des normales au nuage de points d’origine et de supprimer les points aberrants. Elle suit généralement les étapes Capturer des images depuis la caméra et De la carte de profondeur au nuage de points.