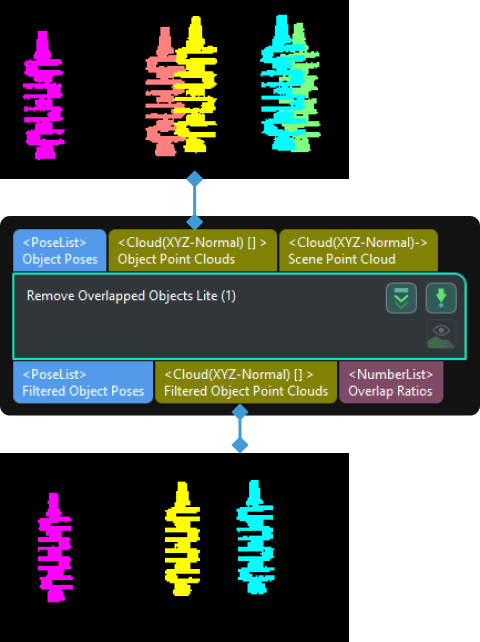
Suppression des objets superposés Lite
Fonction
Cette étape sert à supprimer les objets superposés, c’est-à-dire que lorsque plusieurs résultats de vision existent au même emplacement d’une pièce, les résultats de vision non admissibles peuvent être supprimés en ajustant les paramètres.
Scénario d’utilisation
Cette étape est généralement utilisée après Appariement fin 3D Lite (recommandé) ou Appariement fin 3D pour supprimer les objets superposés qui ne sont pas adaptés à la préhension.
Paramètres
- Niveau de réglage des paramètres
-
Description : Ce paramètre permet de définir le niveau de réglage des paramètres. Les paramètres diffèrent selon le niveau de réglage.
Liste des valeurs : Basique, Avancé
Consigne : Si le Niveau de réglage des paramètres est défini sur Basique, veuillez compléter les paramètres sous « Type de modèle d’objet » et « Réglage du seuil ». Si le Niveau de réglage des paramètres est défini sur Avancé, les paramètres sous Paramètres avancés devront également être configurés.
Type de modèle d’objet
- Type de modèle d’objet
-
Description : Ce paramètre permet de sélectionner le type de modèle de nuage de points de l’objet.
Liste des valeurs : Modèle de surface, Modèle de bord
Consigne : Sélectionnez le type de modèle de nuage de points selon les besoins réels. Si le modèle de bord est sélectionné, veuillez fournir le nuage de points de scène qui représente l’ensemble de la surface de l’objet, et non le nuage de points de scène qui ne représente que les arêtes extraites.
Réglage du seuil
- Seuil du taux de superposition
-
Description : Le seuil du taux de superposition entre l’objet et les autres objets. Si le taux de superposition dépasse cette valeur, l’objet sera considéré comme superposé.
Taux de superposition = Aire projetée du nuage de points se superposant à l’objet / Aire projetée du modèle de nuage de points de l’objet Valeur par défaut : 30%
Paramètres avancés
- Méthode de génération de la taille de pixel
-
Description : Lorsque le taux de superposition est calculé à partir de la projection orthographique 2D du nuage de points de l’objet, sélectionnez la méthode pour générer la taille par pixel sur l’image 2D projetée.
Liste des valeurs : Auto, Manuel
-
Auto : Génère automatiquement la taille par pixel sur l’image 2D projetée.
-
Manuel : Définissez manuellement la Taille de pixel.
Consigne : Si la « Méthode de génération de la taille de pixel » est définie sur « Auto », les nuages de points en entrée doivent appartenir au même type d’objet. Cette fonctionnalité ne prend pas en charge les nuages de points d’entrée de types d’objets différents. Si les nuages de points en entrée appartiennent à des types d’objets différents, veuillez régler la « Méthode de génération de la taille de pixel » sur « Manuel ».
-
- Taille de pixel
-
Description : Définissez la taille de pixel en millimètres.
Valeur par défaut : 2.5 mm
Consigne : Il est recommandé de définir la « Taille de pixel » identique à l’« Intervalle d’échantillonnage » lors de la création du modèle de nuage de points. Si la valeur est trop grande, la précision du taux de superposition calculé peut être réduite. Si la valeur est trop petite, le taux de superposition calculé peut être plus faible.
- Plage de suppression des points de scène autour de l’objet
-
Description : Dans cette plage, les points du nuage de points de scène autour de l’objet seront supprimés, et le reste du nuage de points de scène sera pris en compte pour la détection de superposition. L’unité est le millimètre.
Valeur par défaut : 3 mm
- Option de visualisation
-
Description : Ce paramètre permet de sélectionner l’élément à visualiser.
Options :
-
Résultat filtré : Le nuage de points de scène est affiché en blanc, les objets superposés dont le taux de superposition dépasse le seuil sont affichés en rouge, et les objets non superposés sont affichés dans d’autres couleurs.
-
Image de projection de l’objet : Image 2D d’un objet individuel après projection.
-
Carte de profondeur de l’arrière-plan sans objets : La carte de profondeur de l’arrière-plan après suppression des objets.
-
Nuage de points de boîte englobante du modèle de bord : Nuage de points de boîte englobante du modèle de bord de l’objet.
-