Analyser l’erreur des paramètres extrinsèques dans une configuration EIH
Construire le projet pour obtenir les poses de la mire de calibration
-
Ajouter l’étape « Capturer des images à partir de la caméra ».
Créez un nouveau projet et ajoutez l’étape « Capturer des images à partir de la caméra », ou sélectionnez l’étape dans un projet ouvert. Cliquez sur le bouton Sélectionner la caméra dans le panneau des paramètres de l’étape pour sélectionner et connecter la caméra. Sélectionnez ensuite les paramètres de calibration de la caméra à vérifier.
-
Ajouter l’étape « Calculer la pose de la mire de calibration et vérifier les paramètres intrinsèques de la caméra ».
Ajoutez l’étape « Calculer la pose de la mire de calibration et vérifier les paramètres intrinsèques de la caméra » et connectez-la à l’étape « Capturer des images à partir de la caméra ».
-
Ajouter l’étape « Transformer les poses ».
Ajoutez l’étape « Transformer les poses » et réglez le type de transformation sur « CameraToRobot ». Connectez ensuite l’étape « Calculer la pose de la mire de calibration et vérifier les paramètres intrinsèques de la caméra » à cette étape.
Si vous utilisez un robot portique, veuillez remplacer l’étape « Transformer les poses » par l’étape « Transformer les poses pour portique ».
-
Ajouter l’étape « Sortie ».
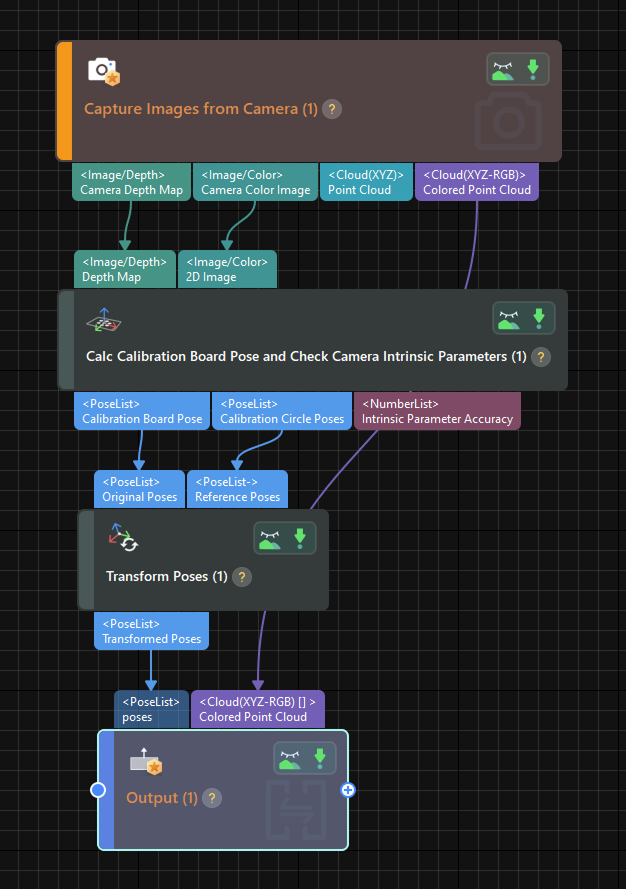
Ajoutez l’étape « Sortie », réglez le type de port sur « Custom », sélectionnez « poses » dans la fenêtre « Assistant de configuration de sortie », et connectez l’étape « Transformer les poses » à l’étape « Sortie » pour produire la pose calculée de la mire de calibration.
Le projet construit est présenté ci-dessous.
-
Exécutez le projet et vérifiez le résultat.
Exécutez le projet et vérifiez le résultat du calcul de la pose de la mire de calibration dans le panneau Journal en bas.
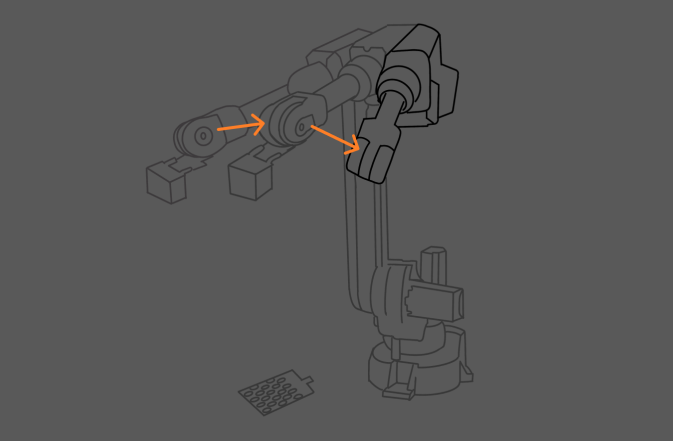
Le robot transporte la caméra pour capturer des images de la mire de calibration depuis différentes positions
Le robot transporte la caméra et se déplace vers différentes positions dans l’espace de travail. Il est recommandé d’inclure à la fois des translations et des rotations dans le mouvement. La caméra capturera des images après l’exécution du projet, puis les données de pose de la mire de calibration seront enregistrées et utilisées pour analyser l’erreur des paramètres extrinsèques.
Ajouter des poses et analyser l’erreur
-
Cliquez sur + pour ajouter davantage de poses.
-
Cliquez sur Analyser l’erreur pour afficher le résultat.
Si l’erreur est trop grande, ajoutez des points de passage fixes à proximité des positions nécessitant une grande précision, puis capturez à nouveau les images de la mire de calibration et réanalysez l’erreur. Par exemple, ajoutez un point de passage près de la position de prise de vue ou du point de préhension. Ainsi, lorsque le robot atteint ce point de passage depuis une certaine distance, l’erreur de préhension due à une mauvaise répétabilité peut être réduite.