Guide de vérification des paramètres du modèle de robot
Lorsque la pose du robot ou celle de l’outil du robot simulé dans Mech-Viz n’est pas cohérente avec celle du robot réel, veuillez vous référer à cette section pour vérifier les paramètres du modèle de robot.
Exemple de pose incohérente
Un robot Kawasaki RS007N est utilisé dans l’exemple suivant.
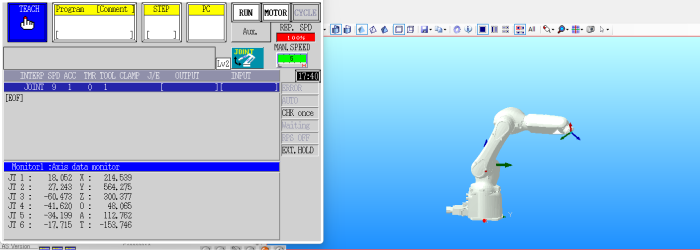
| Dans l’exemple suivant, le robot virtuel affiché dans le logiciel de simulation fourni par le fabricant du robot représente le robot réel. |
-
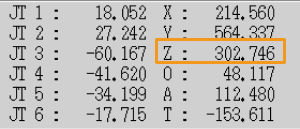
Utilisez le boîtier d’apprentissage pour déplacer le robot réel vers une pose aléatoire, et relevez les valeurs des JPs ainsi que la pose de l’outil.
-
Recherchez Kawasaki RS007N dans la Bibliothèque des modèles de robot et sélectionnez le modèle de robot.
-
Saisissez les valeurs des JPs du robot réel dans Mech-Viz, et la pose du robot simulé est montrée ci-dessous.
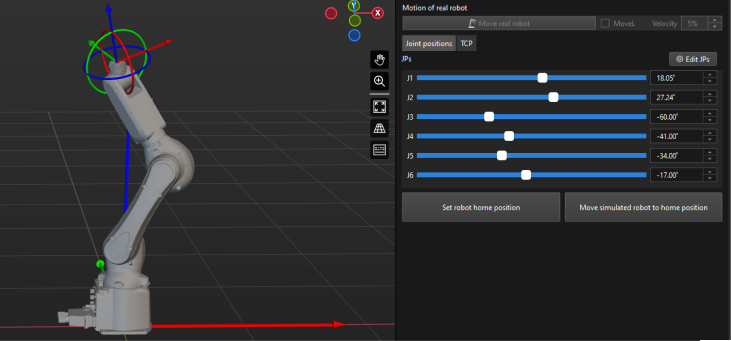
Comme vous pouvez le constater à partir des deux figures ci-dessus, les poses du robot sont très différentes.
Procédure de vérification
Veuillez vérifier les éléments suivants dans l’ordre :
-
Reportez-vous à Configurations du robot pour vérifier si les configurations du robot sont correctes.
-
Vérifiez si les paramètres DH du modèle de robot correspondent à ceux des spécifications du robot.
-
Pour vérifier les paramètres du modèle de robot, les éléments spécifiques à contrôler sont les suivants :
-
Les orientations des axes dans le repère de référence du robot.
-
Les sens de rotation des articulations du robot.
-
Les poses des articulations du robot.
-
L’origine du repère de référence du robot.
-
|
Les éléments ci-dessus sont définis dans le fichier [robot]_algo.json.
|
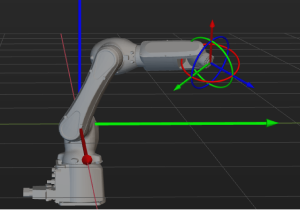
Orientations des axes dans le repère de référence du robot
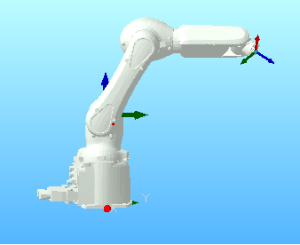
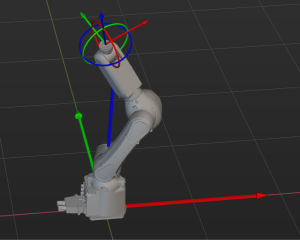
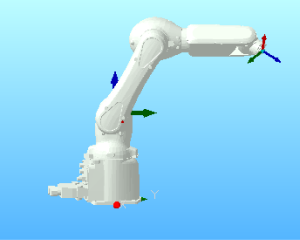
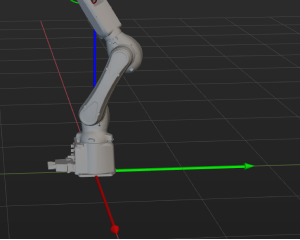
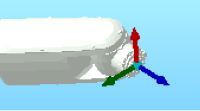
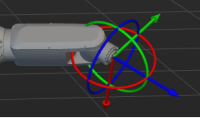
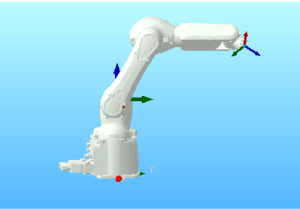
Comme on peut le voir dans la figure suivante, le robot réel est orienté vers la direction Z positive de son propre repère de référence, tandis que le robot simulé est orienté vers la direction X positive de son propre repère de référence.
|
|
Robot réel |
Robot simulé |
| Veuillez passer cette partie si les orientations des axes dans le repère du robot réel sont cohérentes avec leurs homologues simulés. |
Dans ce cas, les axes X et Y dans le repère du robot simulé doivent être pivotés de 90° dans le sens antihoraire autour de l’axe Z. Veuillez suivre les étapes ci-dessous pour résoudre la différence :
-
Définissez la valeur du paramètre robot_frame_in_robot_base_frame dans le fichier kawasaki_RS007N_algo sur [0,0,0,0,0,-90], puis enregistrez la modification.
-
Cliquez avec le bouton droit sur le nom du robot dans l’arborescence des ressources du projet et sélectionnez Recharger le robot dans le menu contextuel.
-
Saisissez de nouveau les valeurs des JPs du robot réel dans Mech-Viz, et comparez les poses du robot.
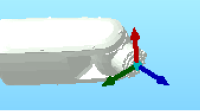
Robot réel
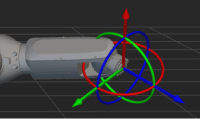
Robot simulé
Sens de rotation des articulations du robot
Ajustez les positions des articulations sur le boîtier d’apprentissage et dans Mech-Viz en conséquence, puis comparez les sens de rotation des articulations pour le robot réel et le robot simulé.
|
|
Robot réel |
Robot simulé |
| Veuillez passer cette partie si les sens de rotation des articulations du robot réel sont cohérents avec leurs homologues simulés. |
Dans ce cas, les J3 du robot réel et du robot simulé tournent dans des directions opposées. Veuillez suivre les étapes ci-dessous pour résoudre la différence :
-
Modifiez la valeur du paramètre axis_flip dans le fichier kawasaki_RS007N_algo de 100010 à 101010, puis enregistrez la modification.
Remplacer 0 par 1 ou 1 par 0 permet d’inverser le sens de rotation de l’articulation correspondante. -
Cliquez avec le bouton droit sur le nom du robot dans l’arborescence des ressources du projet et sélectionnez Recharger le robot dans le menu contextuel.
-
Faites pivoter séparément les articulations du robot et comparez le sens de rotation des axes du robot réel avec celui du robot simulé.
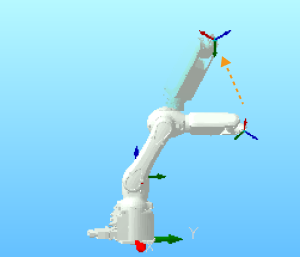
Poses des articulations du robot
Après avoir corrigé les sens de rotation des articulations, saisissez de nouveau les JPs du robot réel dans Mech-Viz et comparez les poses du robot réel et du robot simulé.
|
|
Robot réel |
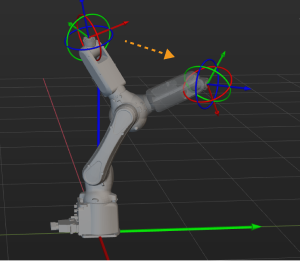
Robot simulé |
| Veuillez passer cette partie si les poses des articulations du robot réel sont cohérentes avec leurs homologues simulés. |
D’après les poses du robot ci-dessus, les orientations de J6 diffèrent de 180°. Veuillez suivre les étapes ci-dessous pour résoudre la différence :
-
Modifiez la valeur du paramètre mastering_joints dans le fichier kawasaki_RS007N_algo de [ 0, 0, 90, 0, 0, -90 ] à [ 0, 0, 90, 0, 0, 90 ], puis enregistrez la modification.
-
Cliquez avec le bouton droit sur le nom du robot dans l’arborescence des ressources du projet et sélectionnez Recharger le robot dans le menu contextuel.
Saisissez de nouveau les valeurs des JPs du robot réel dans Mech-Viz, et comparez les poses du robot.
|
|
Robot réel |
Robot simulé |
Origine du repère de référence du robot
Avant de vérifier l’origine du repère de référence du robot, assurez-vous qu’aucun outil terminal n’est installé sur le robot réel et qu’il n’existe aucune configuration d’outil dans Mech-Viz.
Comparez les poses de l’outil lorsque les JPs du robot réel et du robot simulé sont identiques.
|
|
Pose de l’outil du robot réel |
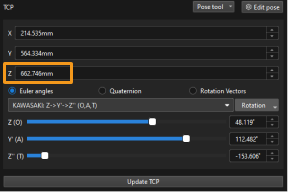
Pose de l’outil du robot simulé |
| Veuillez passer cette partie si l’origine du repère de référence du robot réel est cohérente avec son homologue simulé. |
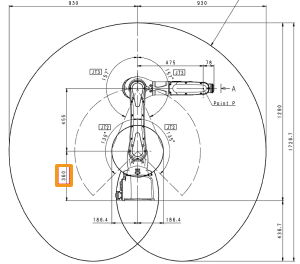
Comme on peut le constater à partir des figures ci-dessus, il existe une différence de 360 mm entre les valeurs Z des poses de l’outil. En se référant aux spécifications DH, la valeur de DH1 est 360. Tout cela indique que le repère de référence du robot réel n’est pas situé au bas du robot mais au niveau de J2.
Veuillez suivre les étapes ci-dessous pour résoudre la différence :
-
Définissez la valeur du paramètre robot_frame_in_robot_base_frame dans le fichier kawasaki_RS007N_algo sur [0,0,0.36,0,0,-90], puis enregistrez la modification.
-
Cliquez avec le bouton droit sur le nom du robot dans l’arborescence des ressources du projet et sélectionnez Recharger le robot dans le menu contextuel.
-
Saisissez de nouveau les valeurs des JPs du robot réel dans Mech-Viz, et comparez les poses du robot.
|
|
Robot réel |
Robot simulé |
Vérification finale
Après avoir vérifié les éléments ci-dessus, déplacez le robot réel vers une autre pose et saisissez les JPs à cette pose dans le logiciel pour vérifier si les poses du robot réel et du robot simulé sont cohérentes.
Si les poses sont cohérentes, vous avez terminé la vérification des paramètres du modèle de robot.