Créer un flux de travail
Après configurer les ressources du projet, vous pouvez commencer à créer le flux de travail.
Introduction
Le flux de travail désigne le programme de commande de mouvement du robot construit sous forme d’organigramme dans Mech-Viz. Mech-Viz utilise une approche graphique pour construire des flux de travail.
Un flux de travail est composé de nombreuses étapes, et chaque étape représente un module de programmation robotique différent. Vous pouvez sélectionner l’étape dont vous avez besoin dans la bibliothèque d’étapes, la faire glisser vers la zone d’édition du flux de travail et définir la logique et le déroulement du programme en paramétrant et en connectant des étapes, afin de créer la logique pour contrôler le robot.
Mech-Viz fournit de nombreuses étapes pour répondre aux exigences de divers scénarios industriels, tels que le contrôle du mouvement du robot, la connexion du système de vision, le traitement des résultats de vision, le contrôle DI/DO, la topologie logique, l’évaluation logique, la préhension, la dépalettisation et la communication.
Procédures de base pour utiliser des étapes
| Objectifs | Description |
|---|---|
Rechercher une étape |
Saisissez un mot-clé dans la zone de recherche en haut du panneau du flux de travail ou consultez la catégorie pertinente pour l’étape souhaitée. |
Ajouter une étape |
Faites glisser l’étape depuis la bibliothèque d’étapes vers l’espace de programmation graphique. |
Supprimer une étape |
Sélectionnez l’étape à supprimer puis appuyez sur la touche Supprimer; ou cliquez avec le bouton droit sur l’étape à supprimer et choisissez Supprimer dans le menu contextuel. |
Connecter des étapes |
Placez le curseur sur le port de sortie d’une étape, puis faites-le glisser vers le port d’entrée d’une autre étape. |
Supprimer une connexion entre des étapes |
Cliquez sur la connexion à supprimer puis appuyez sur la touche Supprimer. Vous pouvez aussi sélectionner la connexion, cliquer dessus avec le bouton droit, puis choisir Supprimer dans le menu contextuel. |
Personnaliser la description de l’étape |
Cliquez avec le bouton droit sur une étape et sélectionnez Description personnalisée dans le menu contextuel. |
Comment créer un flux de travail
En général, la trajectoire de mouvement du robot est constituée de plusieurs points de passage. Cette section est une introduction à la création d’un flux de travail simple avec une trajectoire formée de deux points de passage.
Suivez les étapes ci-dessous pour créer le flux de travail:
-
Ouvrez Mech-Viz, cliquez sur Nouveau projet vide et sélectionnez un modèle de robot dans la bibliothèque de modèles de robot.
Passez la première étape si vous avez déjà créé un projet Mech-Viz. -
Sélectionnez Flux de travail dans le coin inférieur droit des panneaux fonctionnels.
-
Trouvez l’étape « Déplacement en point fixe » dans la catégorie Déplacement de base du panneau du flux de travail, puis faites-la glisser vers l’espace de programmation graphique à droite.
-
Affichez les angles initiaux des articulations du robot dans le paramètre JPs sur la droite. Vous pouvez ajuster la position d’une articulation en faisant glisser le curseur correspondant, et observer les changements de la pose du robot dans la zone de simulation 3D. La pose après ajustement peut être prise comme point de passage.
-
Reliez l’icône de démarrage à Déplacement en point fixe_1. Cliquez sur le bouton Simuler dans le coin supérieur gauche de l’interface du logiciel. Le robot se déplacera vers le point de passage que vous avez défini auparavant.
-
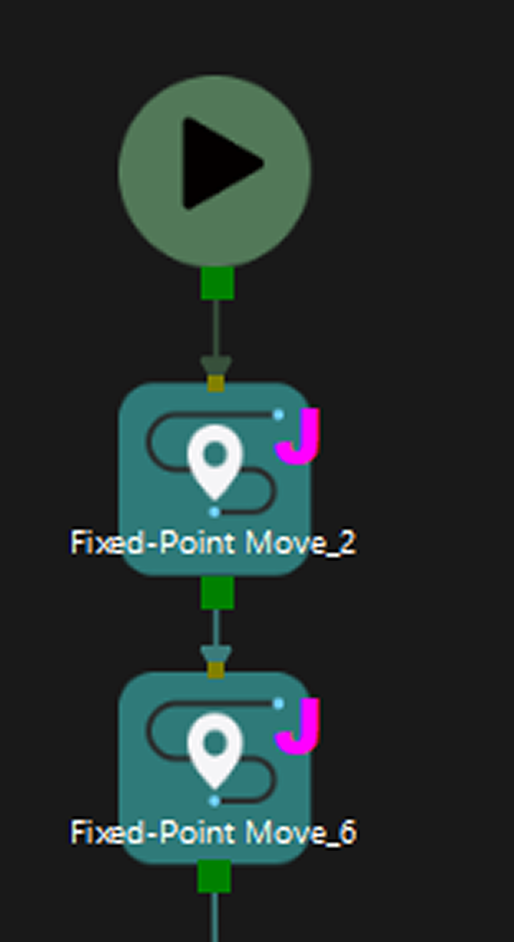
Ajoutez un autre point de passage. De la même manière, faites glisser l’étape Déplacement en point fixe depuis le panneau du flux de travail vers l’espace de programmation graphique. Ensuite, ajustez l’angle d’une articulation. Connectez le port de sortie de Déplacement en point fixe_1 au port d’entrée de Déplacement en point fixe_2, puis cliquez sur le bouton Simuler. Le robot se déplacera d’un point de passage à l’autre.
-
Connectez le port de sortie de Déplacement en point fixe_2 au port d’entrée de Déplacement en point fixe_1 pour une exécution circulaire. Le flux de travail construit est illustré ci-dessous.
|
Pour la création du flux de travail dans des scénarios complexes, veuillez vous référer à Exemples de projets pour plus d’informations.