Prise en main de l’apprentissage profond
Après avoir découvert les bases de l’apprentissage profond, cette section vous guidera pour approfondir ce domaine. Vous devez sélectionner un modèle d’apprentissage profond en fonction de vos besoins réels, puis vous pourrez appliquer ce modèle aux tâches pertinentes.
Choisir une solution d’apprentissage profond
Lors de la conception de la solution de vision, vous devez d’abord déterminer le scénario d’utilisation (chargement et déchargement ou palettisation et dépalettisation) de la solution. Vous devez également évaluer si les performances de reconnaissance des méthodes traditionnelles d’appariement 3D peuvent répondre aux exigences. Vous pourrez ensuite décider d’employer l’apprentissage profond, et la solution d’apprentissage profond spécifique pourra être déterminée. Si vous ne pouvez pas sélectionner une solution d’apprentissage profond en fonction de la situation réelle, veuillez contacter l’assistance technique de Mech-Mind pour obtenir de l’aide.
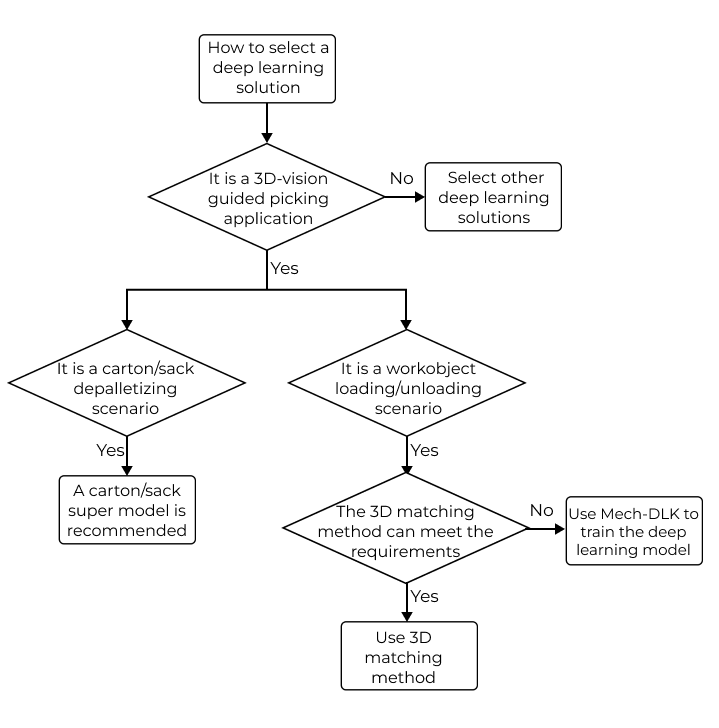
Si les méthodes traditionnelles n’arrivent pas à résoudre les problèmes suivants lors du processus de reconnaissance visuelle, l’emploi de l’apprentissage profond peut apporter une solution.
| N° | Défis pour les méthodes traditionnelles | Illustration |
|---|---|---|
1 |
Les surfaces des objets cibles sont très réfléchissantes, et la qualité du nuage de points est médiocre. |
|
2 |
Les caractéristiques géométriques sur le nuage de points de l’objet cible sont moins nombreuses, et le nombre de points caractéristiques dans le nuage de points est plus faible. |
|
3 |
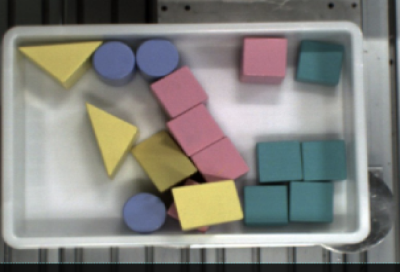
Lorsque les objets cibles sont disposés de manière ordonnée et étroitement ajustés, il est difficile d’identifier les nuages de points des objets individuels ou les nuages de points des objets individuels peuvent être mal identifiés. |
|
4 |
La caractéristique de l’objet cible n’est visible que sur l’image 2D et n’est pas visible dans le nuage de points. |
|
5 |
Le projet a des exigences strictes en matière de temps de cycle de la vision. Lorsqu’il y a un grand nombre d’objets cibles, le temps d’appariement utilisant le modèle de nuage de points peut être long. En utilisant l’apprentissage profond pour d’abord filtrer un lot d’objets cibles puis effectuer l’appariement, le temps nécessaire à l’appariement peut être réduit. |
|




Appliquer l’apprentissage profond
Une fois la solution d’apprentissage profond déterminée, veuillez vous référer à Comment appliquer l’apprentissage profond pour découvrir le flux de travail d’application de l’apprentissage profond afin d’assister la préhension robotisée guidée par vision 3D.