Enseigner la pose de l’objet cible
Lorsque vous souhaitez saisir des objets cibles avec plusieurs méthodes de prise, et que ces objets doivent être déposés dans une pose fixe, vous pouvez enseigner directement le point de passage de pose dans Mech-Viz, afin de garantir un placement précis des objets cibles dans la pose souhaitée.
Exemple d’application
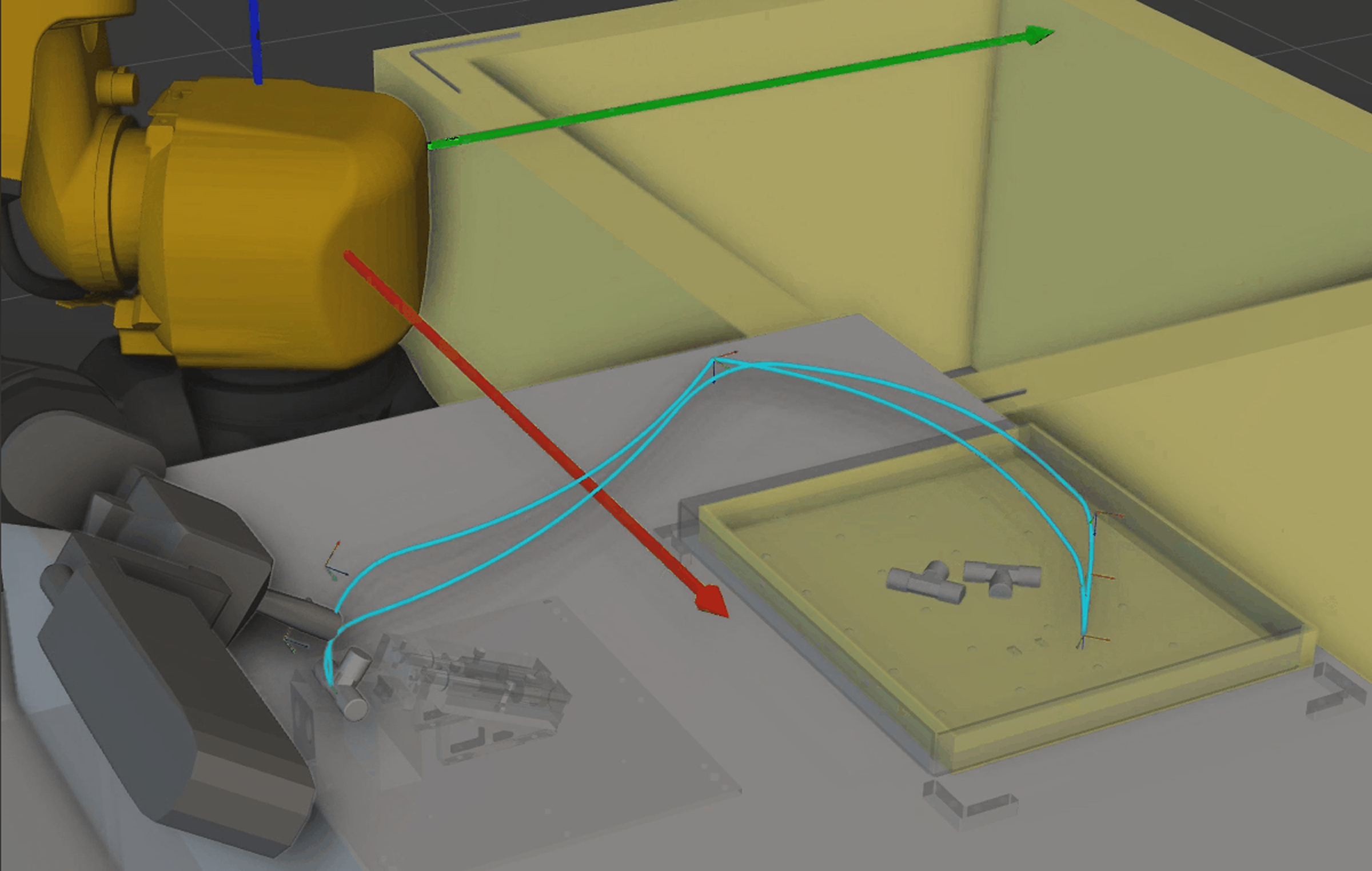
Par exemple, lorsque de petites pièces ont plusieurs points de prise possibles, elles peuvent être saisies de différentes manières. Cependant, les objets cibles doivent être déposés sur la plateforme de transfert dans une pose spécifique, de sorte que la pose de l’objet cible lors du dépôt doit rester cohérente.
Procédures d’opération
Il existe des différences entre la procédure d’enseignement de la pose de l’objet cible en mode de communication Master-Control et celle en mode de communication Standard Interface. Veuillez vous référer à la procédure correspondante pour l’opération.
Procédure d’enseignement des poses d’objet cible en mode de communication Master-Control
En mode de communication Master-Control, suivez les étapes ci-dessous pour enseigner la pose de l’objet cible:
-
Assurez-vous que le flux de travail établi peut piloter le robot en Master-Control pour saisir l’objet cible avec succès.
-
Assurez-vous que le robot, tenant l’objet cible, a atteint la position de pose cible.
-
Vérifiez et assurez-vous que la pose du robot simulé est cohérente avec la pose réelle du robot. Si ce n’est pas le cas, cliquez sur le bouton Synchroniser le robot dans la barre d’outils.
-
Sélectionnez l’étape « Déplacement à point fixe » utilisée comme point de pose dans le flux de travail, puis cliquez sur le bouton Enseigner la pose de l’objet cible dans le panneau de paramètres inférieur.
-
Après avoir cliqué sur Oui dans la fenêtre contextuelle, le type de point de passage du point de passage de pose sera basculé vers la pose de l’objet cible. À ce stade, l’enseignement de la pose de l’objet cible est terminé.
Procédure d’enseignement de la pose de l’objet cible en mode de communication Standard Interface
En mode de communication Standard Interface, suivez les étapes ci-dessous pour enseigner la pose de l’objet cible côté robot et synchroniser les points de passage du programme du robot avec ceux du flux de travail Mech-Viz:
-
Exécutez le programme de prise du robot et vérifiez que le robot saisit avec succès l’objet cible le long du trajet planifié fourni par Mech-Viz.
-
Déplacez en jog le robot tenant l’objet cible jusqu’à sa position de pose.
-
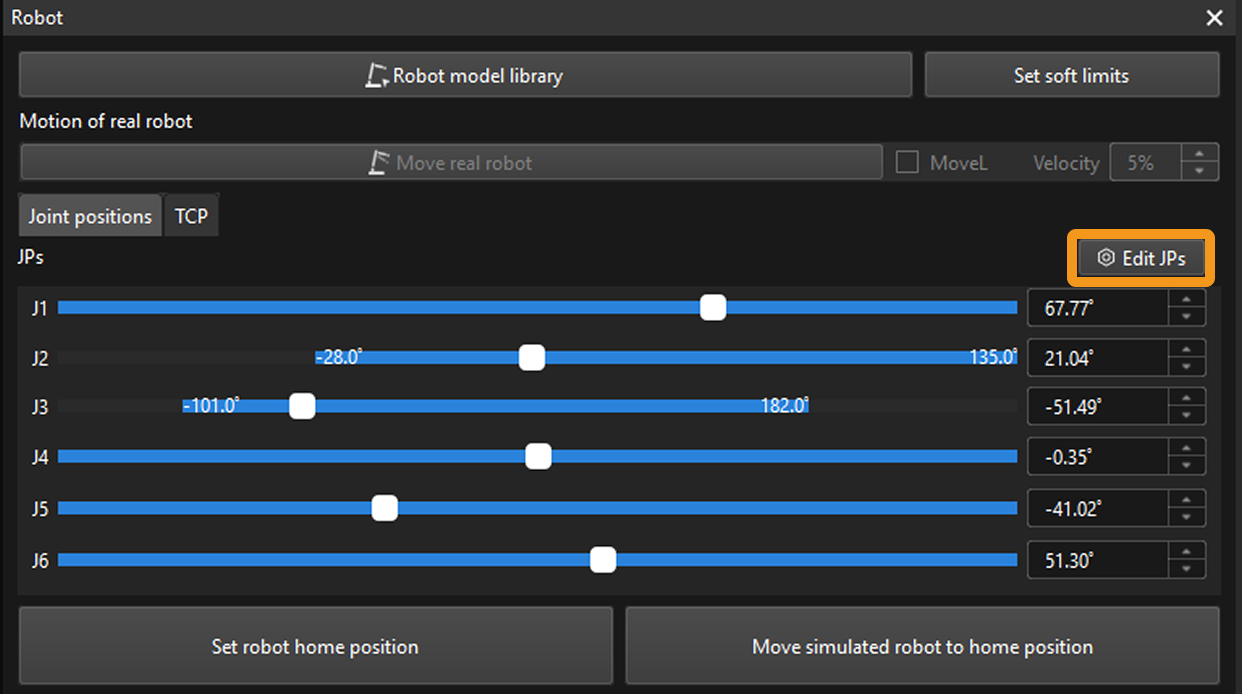
Dans le panneau fonctionnel Robt, cliquez sur le bouton Modifier les JPs, puis saisissez les JPs lus depuis le boîtier d’enseignement afin de vous assurer que la pose du robot simulé est cohérente avec la pose réelle du robot.
-
Sélectionnez l’étape « Déplacement à point fixe » utilisée comme point de pose dans le flux de travail, puis cliquez sur le bouton Enseigner la pose de l’objet cible dans le panneau de paramètres inférieur.
-
Après avoir cliqué sur Oui dans la fenêtre contextuelle, le type de point de passage du point de passage de pose sera basculé vers la pose de l’objet cible.