Outil de changement automatique
Présentation du projet
Cet exemple montre comment changer automatiquement d’outil dans le cas de la prise de petites pièces en tôle empilées de manière aléatoire. Le système de vision guide le robot pour passer à l’outil approprié en fonction des différents points de prise, permettant une prise intelligente dans des bacs profonds et garantissant un taux élevé de vidage de bac.
L’application est la suivante :
Scénario d’application
-
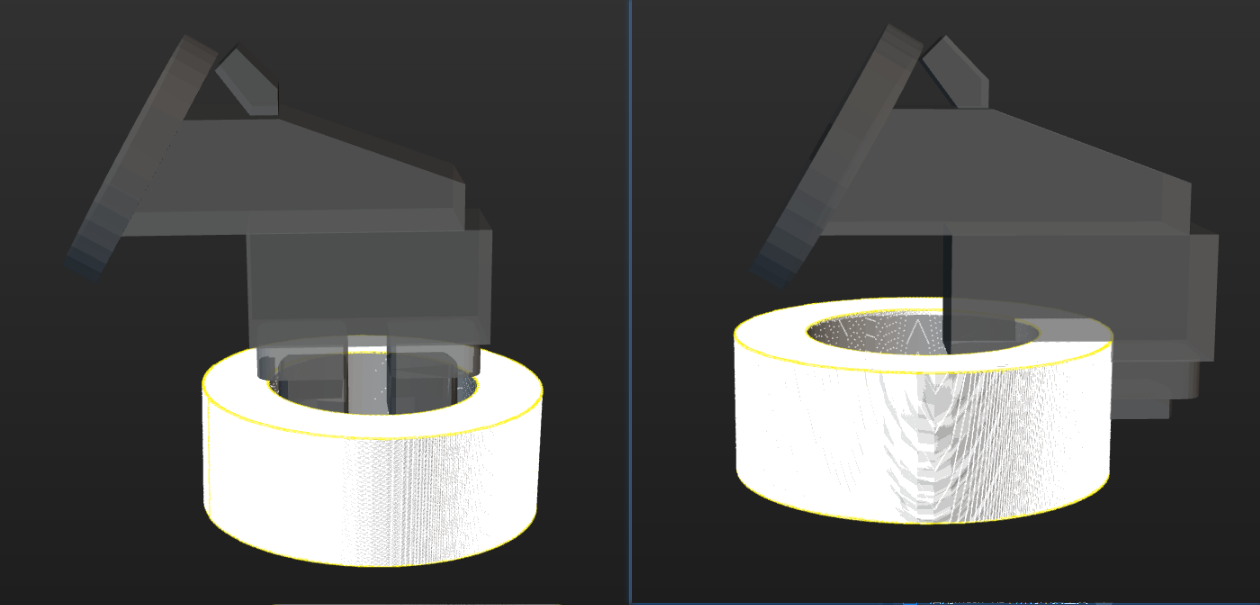
Adapté au scénario consistant à utiliser le même outil pour saisir des objets cibles de plusieurs manières. Par exemple, pour saisir un anneau, vous pouvez écarter le préhenseur à griffes depuis l’intérieur ou le refermer depuis l’extérieur.
-
Non adapté au scénario où le robot doit se déplacer vers la plateforme de changement d’outil pour changer d’outil.
| Cet exemple illustre l’effet de l’utilisation du même outil pour saisir des objets cibles de plusieurs façons. |
Prérequis
-
En mode de communication Master-Control, configurez la logique de contrôle de l’outil standard dans l’arborescence des ressources du projet.
-
Dans l’arborescence des ressources du projet, cliquez sur
 à droite de Outils pour ouvrir la fenêtre Configuration de l’outil. Ajoutez ensuite l’outil et terminez les réglages correspondants.
à droite de Outils pour ouvrir la fenêtre Configuration de l’outil. Ajoutez ensuite l’outil et terminez les réglages correspondants. -
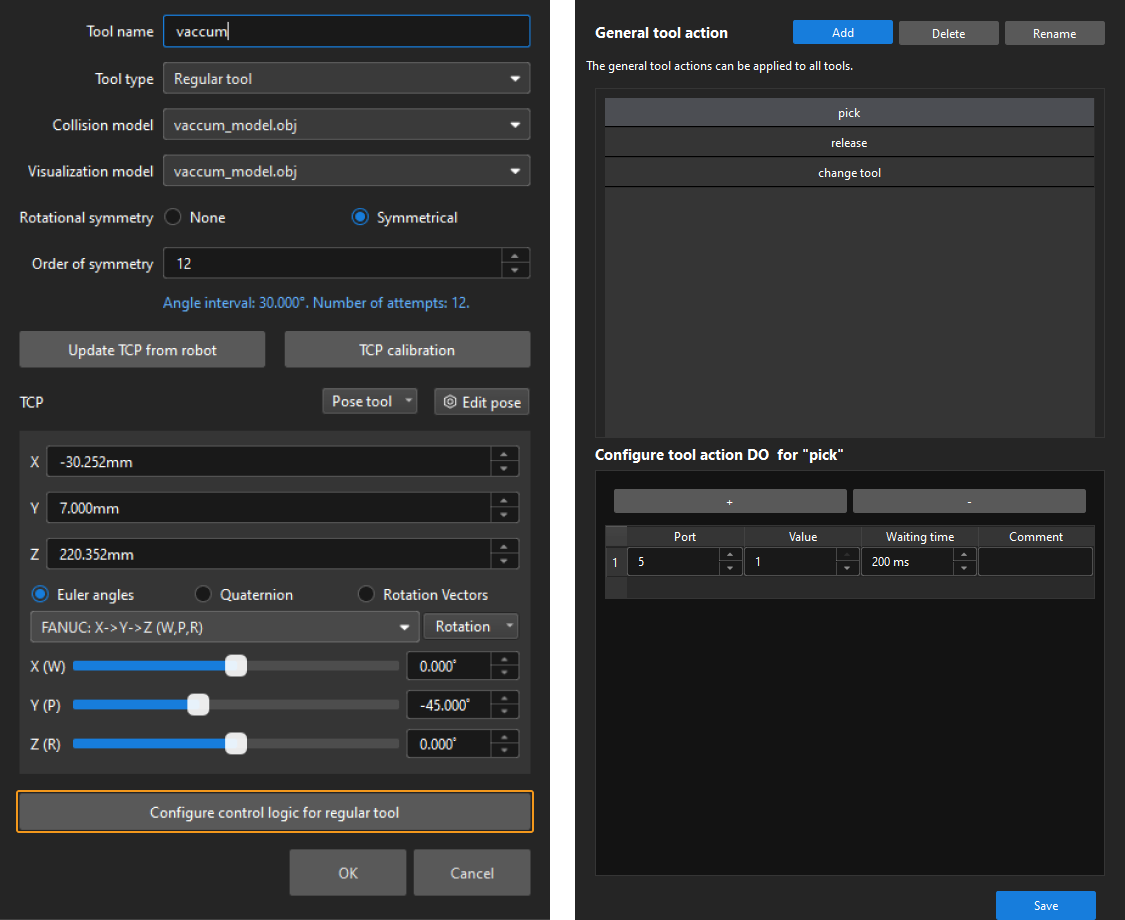
Cliquez sur le Configurer la logique de contrôle pour l’outil standard en bas de la fenêtre et complétez les configurations pertinentes.
-
Ajoutez les noms d’action partagés par tous les outils dans Action générale de l’outil.
-
Configurez les DO pour les actions d’outil correspondant aux différents outils.
-
-
-
Configurez la correspondance entre les points de prise et les outils dans l’éditeur d’objet cible.
Lors du réglage du point de prise, vous pouvez activer les outils requis à partir de Liste des outils afin de faciliter l’aperçu des positions relatives des outils et des points de prise dans l’éditeur d’objet cible. 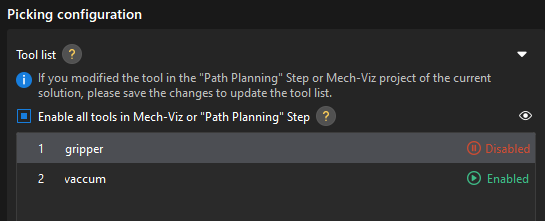
-
Si vous utilisez un programme d’interface standard ou Adapter pour la communication, vous devez écrire un programme côté robot. Ce projet d’exemple est fourni avec des programmes d’exemple. Vous pouvez les télécharger depuis le répertoire d’installation du logiciel à
Communication Component/Robot_Interface/FANUC/sample/MM_S7_Viz_SwitchTCP. Pour plus d’informations sur les programmes d’exemple, reportez-vous à Programmes d’exemple.
Description du flux de travail
-
En mode de communication Interface standard ou Adapter, la position de l’étape Changer d’outil dans le flux de travail est illustrée ci-dessous.

-
En mode de communication Master-Control, le flux de travail est présenté ci-dessous. Par rapport au flux de travail en modes Interface standard et Adapter, Exécuter l’action d’outil est ajouté pour effectuer les actions d’outil correspondantes.

Les étapes clés et leurs caractéristiques dans le flux de travail sont répertoriées dans le tableau ci-dessous.
N° Étape Caractéristique 1
Changement automatique vers l’outil approprié
2
Ajuster l’outil correspondant à l’état initial de prise
3
Utiliser l’outil correspondant pour exécuter la commande de prise
4
Utiliser l’outil correspondant pour exécuter la commande de dépose
Description des paramètres
-
L’étape Changer d’outil
Dans la zone des paramètres de l’étape, réglez Mode de fonctionnement sur Changement automatique vers l’outil approprié, et sélectionnez Limiter les outils utilisés si nécessaire. Si cette option n’est pas sélectionnée, le logiciel tentera de passer à l’outil approprié en essayant tous les outils activés dans l’éditeur d’objet cible.

-
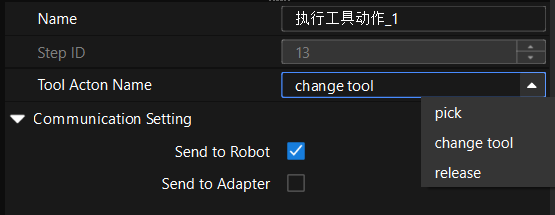
L’étape Exécuter l’action d’outil
Cette étape ne peut être utilisée qu’en mode de communication Master-Control. Sélectionnez l’action d’outil appropriée pour la phase dans le menu déroulant de Nom de l’action d’outil. Sélectionnez Envoyer au robot en mode de communication Master-Control.
Remarques
Pour appliquer cet exemple en production réelle, vous pouvez modifier et configurer le projet selon les remarques suivantes afin de le mettre rapidement en service.
-
Désactivez les enregistrements de vision et appelez le projet Mech-Vision correspondant pour obtenir les résultats de vision via l’étape Reconnaissance visuelle.
-
Configurez des modèles pour objets de scène et outils.
-
Configurez les paramètres dans le panneau fonctionnel détection de collision.
-
Si la communication Interface standard est utilisée, vous pouvez vous référer à Programmes d’exemple pour écrire un programme côté robot.