Outil d’analyse des erreurs
Au cours du processus de production réel, divers problèmes peuvent survenir, tels que des imprécisions dans les paramètres intrinsèques de la caméra et une préhension imprécise. Ces problèmes proviennent souvent d’une multitude de facteurs pouvant être rattachés à différentes étapes de la production.
Cette section explique comment utiliser l’outil d’analyse des erreurs pour diagnostiquer les problèmes ci-dessus.
Introduction
Lorsqu’une erreur survient pendant la reconnaissance et le positionnement, cet outil peut être utilisé pour le dépannage. En fonction de la situation sur site que vous avez décrite, l’outil recommandera des éléments spécifiques à vérifier, notamment la précision de la caméra, la précision absolue et la répétabilité du robot, ainsi que le résultat des paramètres extrinsèques après étalonnage. Cet outil ne permet pas de vérifier la logique du projet ni d’analyser la précision d’appariement.
Vous pouvez accéder à l’outil via . Après avoir ouvert l’outil, vous répondrez aux questions suivantes pour analyser les causes possibles.
-
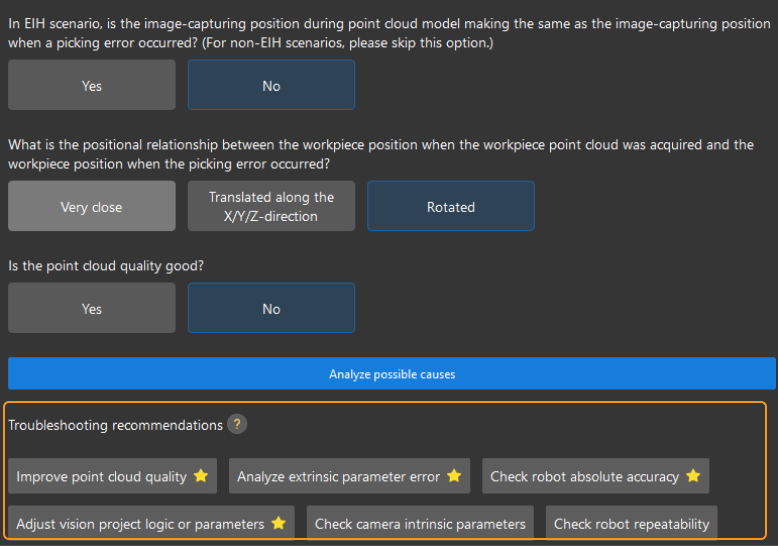
Dans le scénario EIH, la position de capture d’image lors de la création du modèle de nuage de points est-elle identique à la position de capture d’image au moment où une erreur de préhension s’est produite?
-
Quelle est la relation de position entre la position de la pièce lors de l’acquisition du nuage de points de la pièce et la position de la pièce lorsque l’erreur de préhension s’est produite?
-
La qualité du nuage de points est-elle bonne?
Après avoir répondu aux questions, cliquez sur le bouton Analyser les causes possibles, et l’outil fournira quelques recommandations de dépannage à titre de référence.
|
L’élément avec une icône en forme d’étoile est le plus susceptible de provoquer l’erreur, veuillez donc le vérifier attentivement. |
Fonctions principales
Cet outil peut être utilisé pour analyser les causes des erreurs liées aux caméras, aux robots et aux paramètres extrinsèques.
Pour l’analyse des erreurs de caméra, veuillez lire la section ci-dessous.
Pour l’analyse des erreurs du robot, veuillez lire la section ci-dessous.
Pour l’analyse des erreurs des paramètres extrinsèques, veuillez lire la section ci-dessous.
Pour la correction automatique de la dérive de précision dans le système de vision, veuillez lire la section ci-dessous.