Bases de l’apprentissage profond
Dans certains processus de reconnaissance visuelle, les méthodes traditionnelles d’appariement et de regroupement peuvent ne pas donner des résultats satisfaisants. Par exemple, lors de la préhension d’objets cibles fortement réfléchissants, la qualité des nuages de points peut être médiocre, ce qui conduit à des résultats imprécis des méthodes d’appariement 3D. De plus, lorsque les objets cibles sont disposés très près les uns des autres, les résultats des méthodes de regroupement peuvent être peu souhaitables, ce qui affecte négativement la reconnaissance visuelle et la préhension robotisée. Compte tenu de ces circonstances, vous pouvez envisager d’utiliser l’apprentissage profond pour aider à la reconnaissance.
L’apprentissage profond relève du domaine de l’intelligence artificielle et fait appel à des modèles de réseaux neuronaux complexes.Une fois qu’un grand volume de données est fourni, les techniques d’apprentissage profond peuvent simuler le processus d’apprentissage humain, prédire ou identifier des motifs à partir de vastes ensembles de données, extraire des caractéristiques des données, puis effectuer les tâches pertinentes.
Mech-Mind fournit un module d’algorithme de segmentation d’instances dans le domaine de la préhension robotisée guidée par la vision 3D. Lorsque les méthodes traditionnelles n’atteignent pas les résultats attendus, la méthode de segmentation d’instances peut être utilisée pour assister la reconnaissance. Les sections suivantes présenteront les effets du module d’algorithme de segmentation d’instances dans divers scénarios de préhension.
Palettisation et dépalettisation
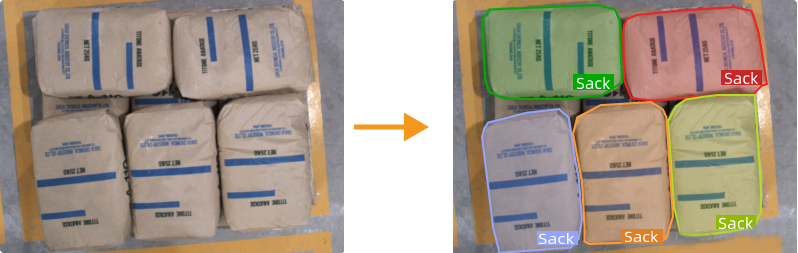
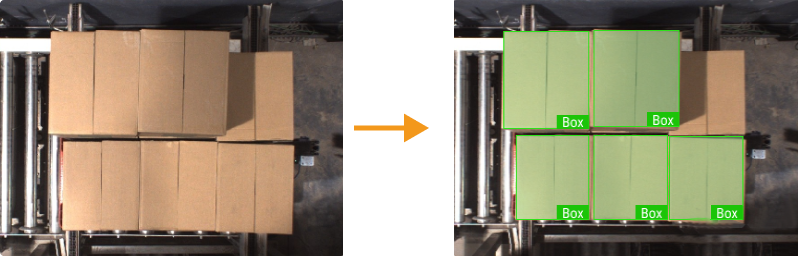
La palettisation et la dépalettisation désignent le retrait d’objets tels que des cartons, des bacs retournables et des sacs de la palette selon les besoins, et leur placement sur la palette ou sur des équipements associés (tels que des dispositifs d’ouverture de sacs, des convoyeurs, etc.). Le module d’algorithme de segmentation d’instances peut segmenter des cartons et des sacs placés étroitement les uns contre les autres, comme illustré dans la figure ci-dessous.
Chargement et déchargement
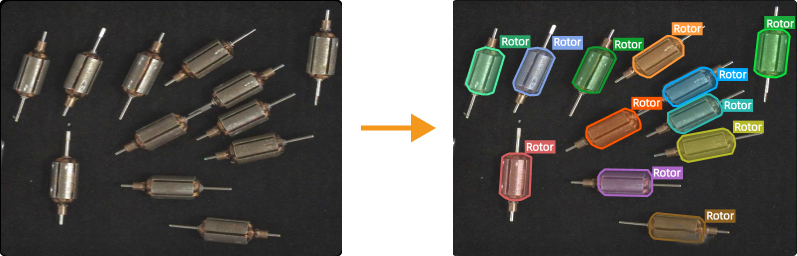
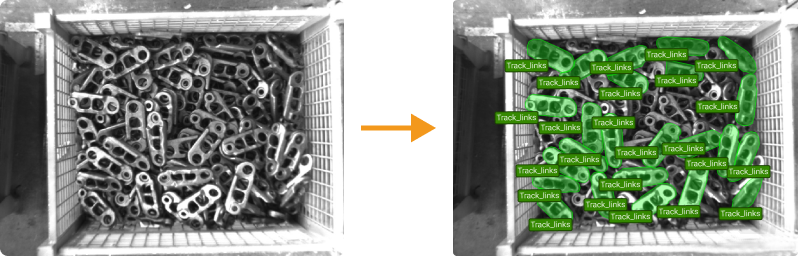
Le chargement et le déchargement désignent la manutention et la préhension d’objets cibles complexes, de composants métalliques et de pièces irrégulières dans des secteurs tels que l’automobile, la sidérurgie et la mécanique. Le module d’algorithme de segmentation d’instances peut segmenter le contour de chaque objet cible tout en produisant simultanément des étiquettes de classe. Par exemple, il peut segmenter des rotors dispersés et empilés, des maillons de chenilles, comme illustré dans la figure ci-dessous.