Configurer la détection de collisions
Dans ce panneau fonctionnel, vous pouvez configurer la détection de collisions. Lors de la planification de trajectoire du robot, Mech-Viz mettra en évidence les zones où des collisions pourraient se produire dans la zone de simulation 3D et arrêtera le projet afin d’éviter des collisions réelles.
Veuillez vous référer à Sujet : Détection de collisions pour davantage de savoir-faire sur le réglage des paramètres et le dépannage.
Vérifier la configuration de la détection de collisions
Ce tableau affiche dynamiquement la configuration de tous les types de détection de collisions. Cliquez sur Légende pour voir ce que représentent les différentes couleurs du tableau. Placez le curseur de la souris sur une cellule spécifique pour savoir comment activer la détection de collisions correspondante.
Détection de collisions par nuage de points
Lorsque le nombre, la position, la forme ou les dimensions des objets qui doivent être impliqués dans la détection de collisions ne peuvent pas être déterminés, et qu’ils ne peuvent donc pas être ajoutés au préalable comme objets de scène, il convient d’utiliser la reconnaissance visuelle. Dans ce cas, il faut activer la détection de collisions par nuage de points.
Plus il y a d’éléments impliqués dans la détection de collisions par nuage de points, plus le risque de collision sur la trajectoire du robot est faible, mais le temps nécessaire à la planification de trajectoire augmentera également en conséquence.
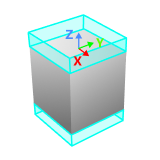
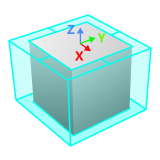
Forme du nuage de points pour la détection de collisions
| Cube de nuage de points | Colonne de nuage de points |
|---|---|
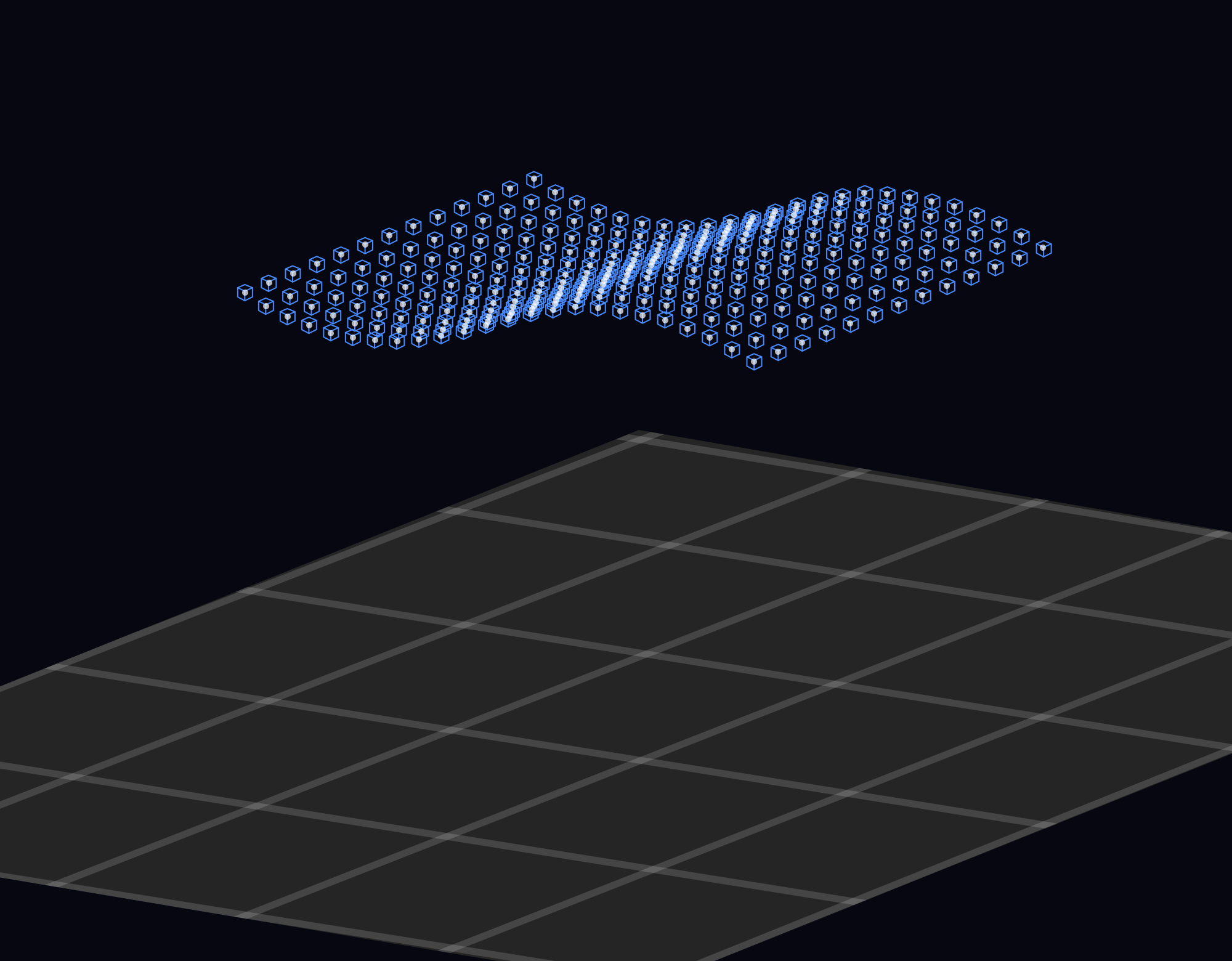
Remplissez la surface du nuage de points avec des cubes pour les calculs de détection de collisions. |
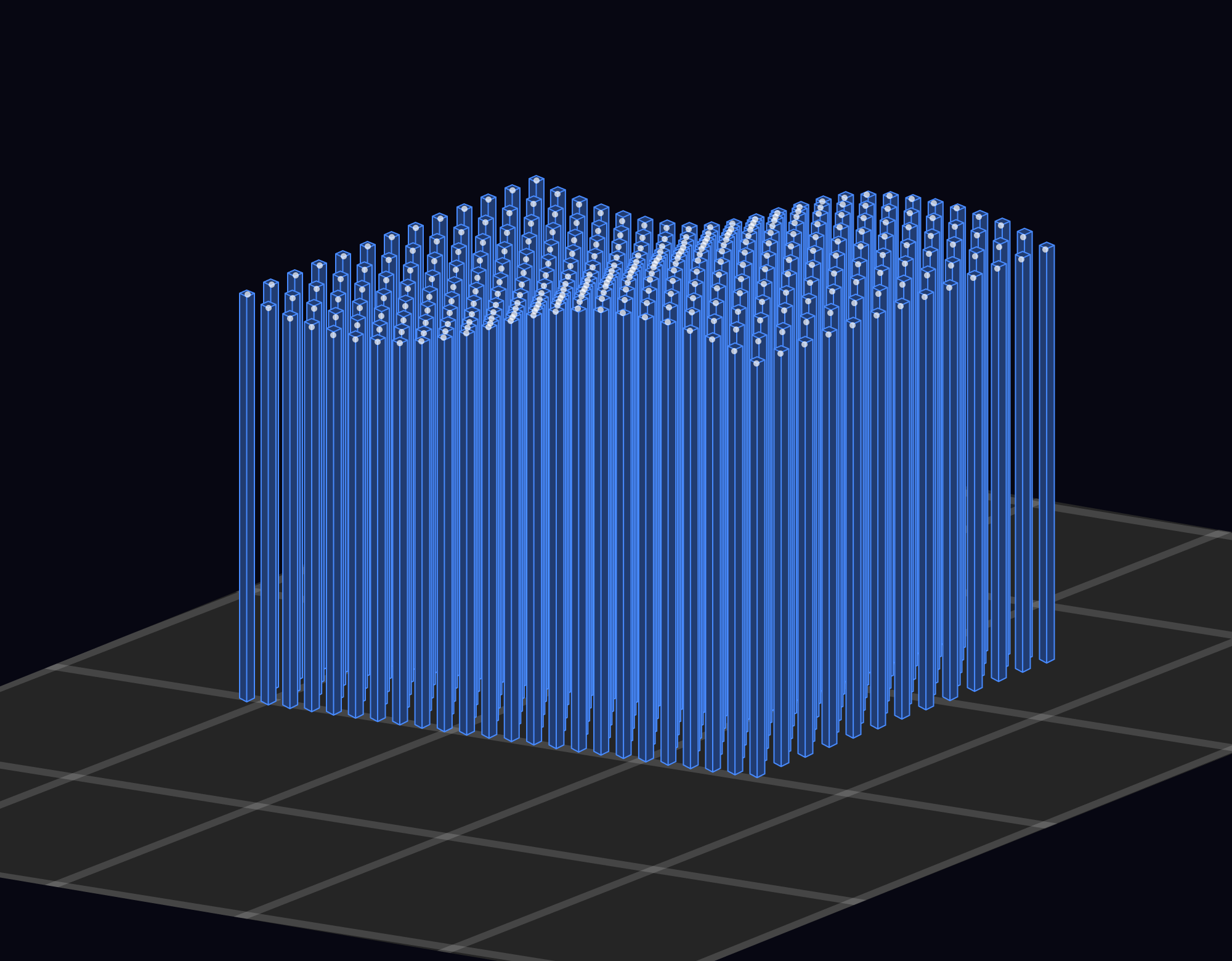
L’espace sous le nuage de points sera rempli de colonnes orientées selon la direction négative de l’axe Z du repère mondial pour les calculs de détection de collisions. La longueur d’extension des colonnes du nuage de points dans le repère mondial peut être déterminée en définissant la Position de base de la colonne. |
|
|
| Lorsque le modèle de l’outil du robot est au format STL, la Colonne de nuage de points est recommandée. Veuillez vous référer à Modèle de l’outil pour une explication détaillée. |
Dans un scénario de dépalletisation, l’utilisation d’une colonne de nuage de points peut éviter des collisions avec d’autres cartons lorsque l’on utilise des préhenseurs à vide pour saisir des cartons, en particulier lorsque le préhenseur aspire le carton depuis sa face latérale.
| L’outil entre en collision avec le carton | Collision non détectée avec le cube de nuage de points | Collision détectée avec la colonne de nuage de points |
|---|---|---|
|
|
|
Forme du nuage de points pour la détection de collisions |
Scénario adapté |
Colonne de nuage de points |
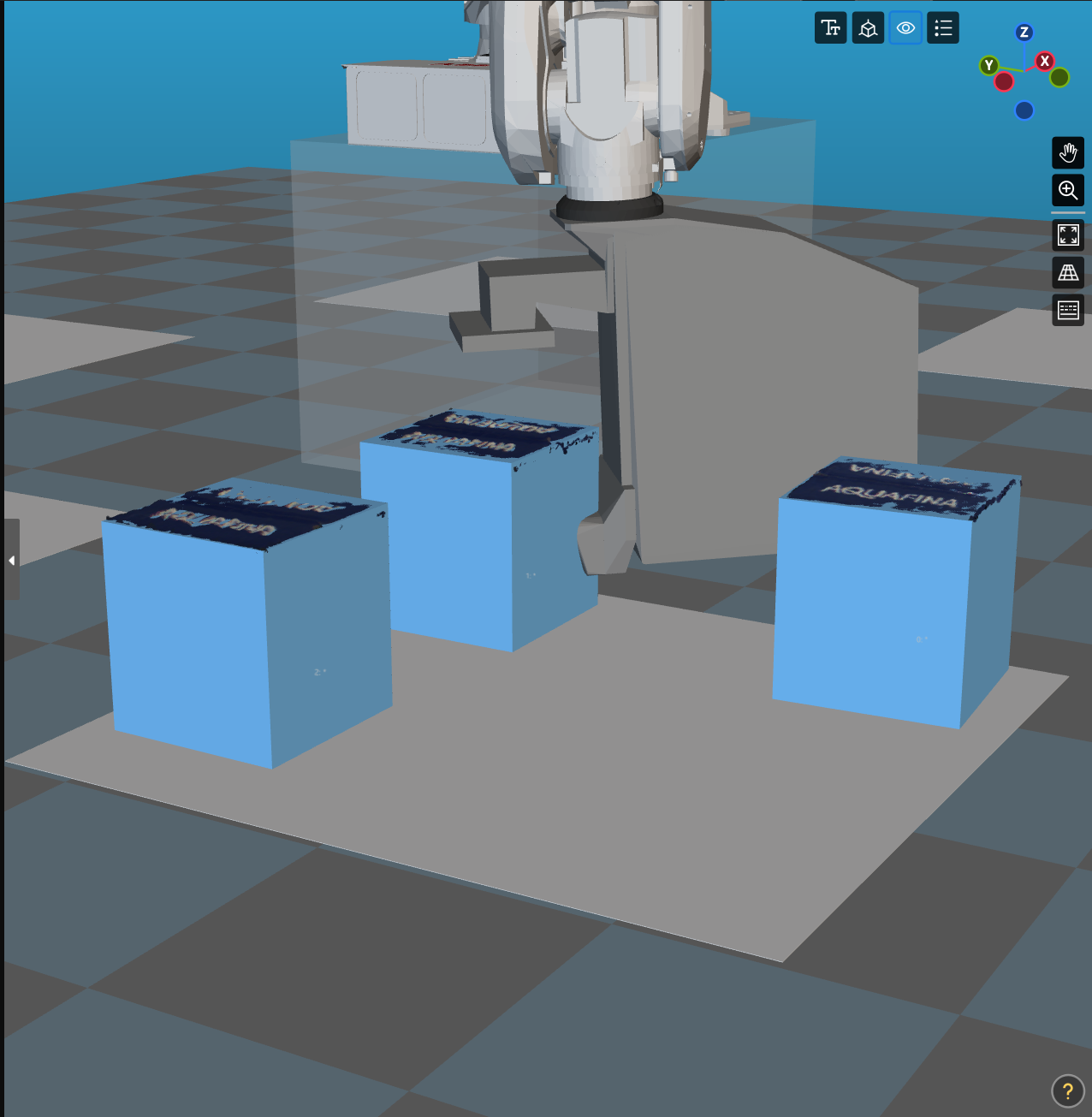
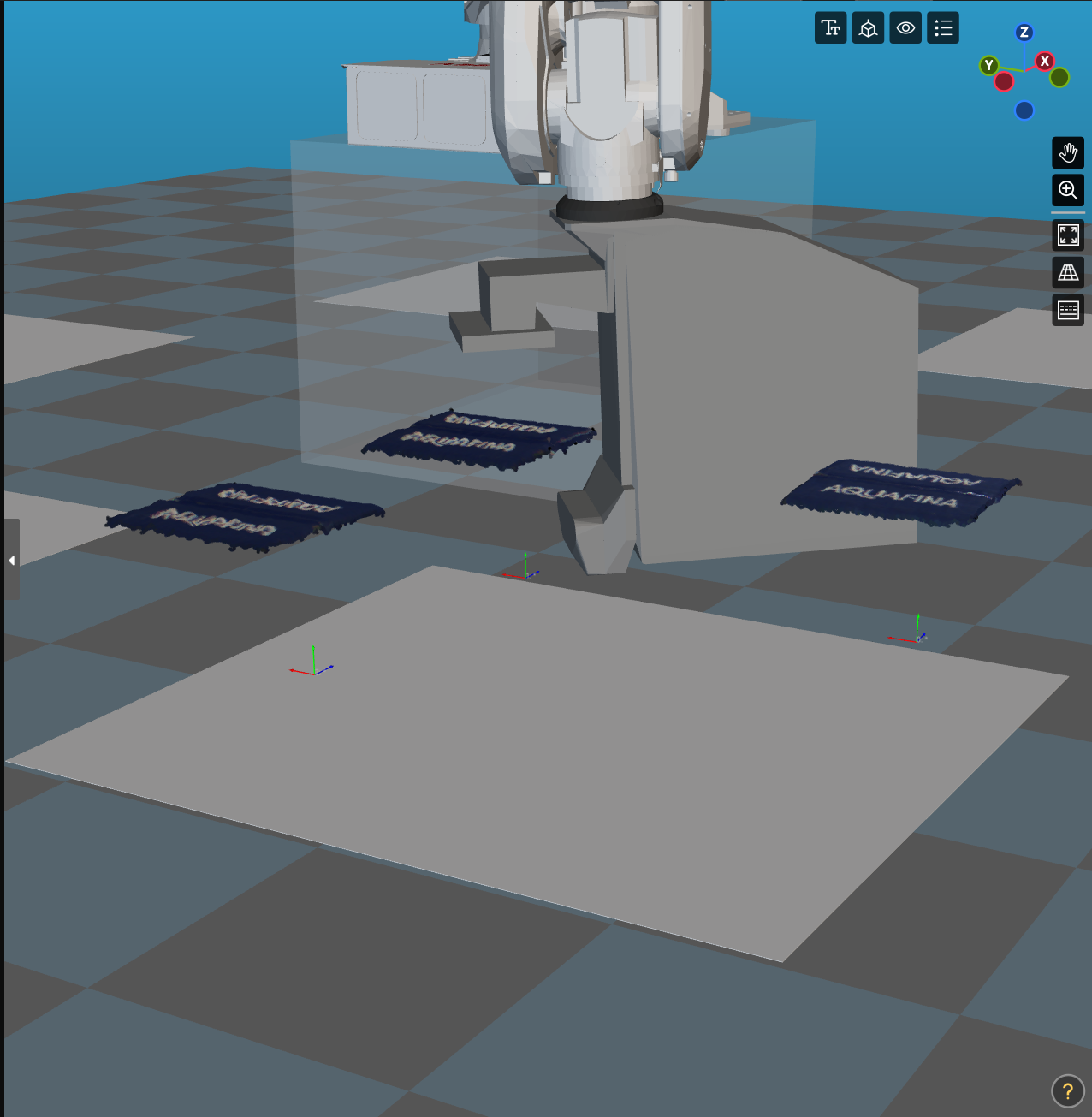
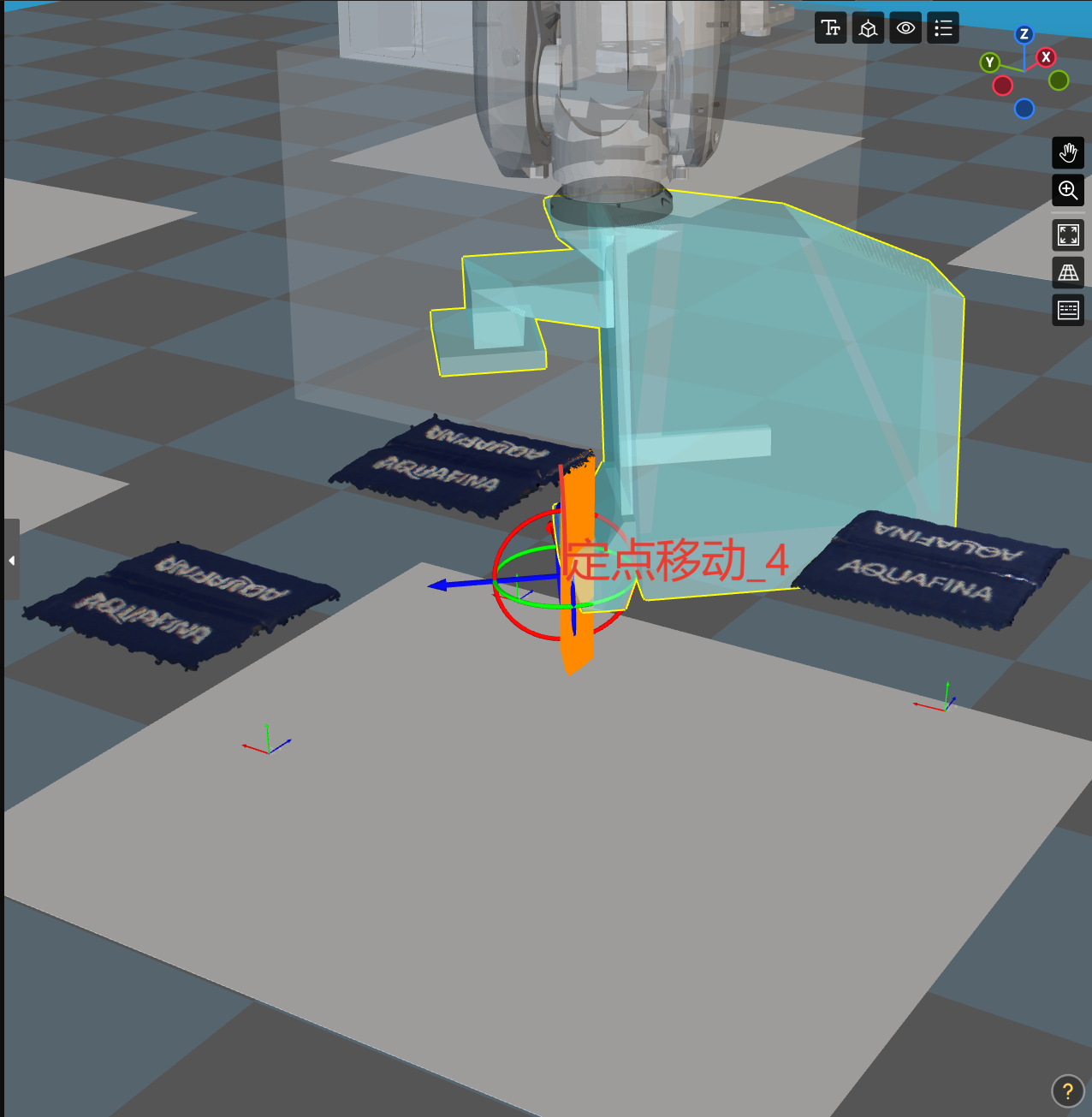
Lorsque une partie de l’objet cible n’est pas reconnue dans le projet Mech-Vision et que seul le nuage de points de la surface supérieure de l’objet est disponible, on peut utiliser la colonne de nuage de points pour générer un modèle de collision complet de l’objet cible. Cela évite efficacement les collisions causées par le passage de l’outil à travers le nuage de points lors de la prise d’autres objets cibles, comme illustré dans la figure ci-dessous.
|
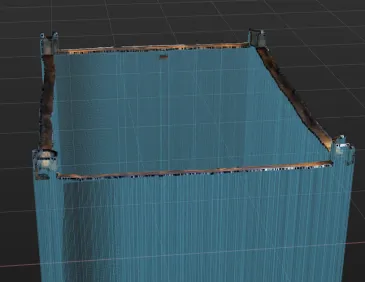
Lorsque le bac est déformé, l’utilisation de la colonne de nuage de points permet de générer avec précision le modèle de collision des parois du bac, empêchant l’outil d’entrer en collision avec ces parois déformées.
|
|
Dans des scénarios de dépalletisation où les cartons doivent être aspirés depuis la face latérale. |
|
Cube de nuage de points |
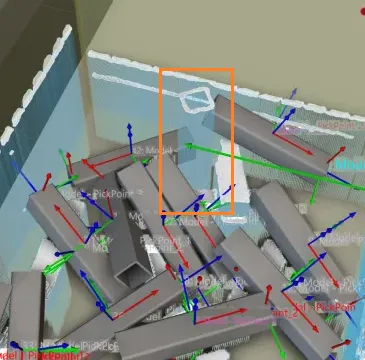
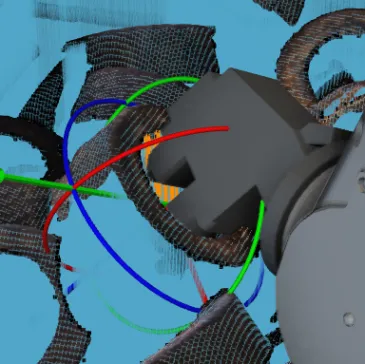
Lorsque l’outil doit traverser l’objet cible lui-même dans une direction horizontale ou oblique pour le saisir, comme montré dans la figure ci-dessous. Le préhenseur traverse l’anneau de manière oblique et ouvre la pince depuis l’intérieur. Si la colonne de nuage de points est sélectionnée, des colonnes de nuage de points verticales seront générées et l’outil entrera inévitablement en collision avec ces colonnes. Dans de tels cas, le cube de nuage de points est recommandé pour la détection de collisions.
|
Seuil de détection de collisions
Si le volume de collision détecté est supérieur à ce seuil, une alarme sera déclenchée. Si le volume de collision est inférieur à ce seuil, il est considéré qu’il n’y a pas collision.
Détecter les collisions entre le robot et le nuage de points
De manière générale, le corps du robot entre rarement en collision avec le nuage de points; il n’est donc pas recommandé d’activer cette option. Pour réduire le temps nécessaire à la planification de trajectoire et améliorer le temps de cycle dans l’application, veuillez n’activer la détection de collisions par nuage de points que pour les parties du robot présentant un risque réel de collision.
Parties du robot à détecter: Activez la détection de collisions par nuage de points pour des parties spécifiques du robot.
Détecter les collisions sur les objets cibles
Une fois cette option activée, vous devez configurer le modèle de collision de l’objet cible dans l’éditeur d’objet cible. Il est recommandé de n’activer cette option que dans les cas suivants:
-
Des collisions inacceptables peuvent survenir entre l’outil et les objets cibles.
-
L’objet cible est grand et susceptible d’entrer en collision avec des objets de la scène.
-
Il existe une incertitude considérable dans la trajectoire (par exemple lors de l’utilisation de l’étape Planification intelligente de trajectoire dans un bac).
-
Dans des scénarios de palettisation mixte.
Une fois cette option activée, Mech-Viz détectera les collisions entre l’outil et les objets cibles, ainsi qu’entre le robot et les objets cibles avant la prise. Après la prise, Mech-Viz détectera les collisions entre l’objet cible tenu et le robot, ainsi qu’entre l’objet cible tenu et les objets de la scène.
| Une fois cette option activée, veuillez ne pas ajuster les points de prise en utilisant des étapes d’ajustement de pose dans Mech-Vision, car cela entraînera des erreurs dans la pose du modèle de collision généré, pouvant conduire à des détections erronées de collisions entre l’objet cible et l’outil. |
Détecter les collisions entre l’objet cible tenu, le nuage de points et les objets cibles non saisis
Lorsque la forme de nuage de points pour la détection de collisions est définie sur colonne de nuage de points, l’activation de cette option peut augmenter le temps de planification de trajectoire. Si le temps de planification est trop long, il est recommandé d’utiliser une forme 3D courante ou un modèle STL pour générer le modèle de collision dans l’éditeur d’objet cible, ou de désactiver cette option. N’activez cette option que lorsque l’accrochage ou le raclage de l’objet cible affecte significativement la prise.
Après avoir activé cette option, vous pouvez définir le Seuil de détection de collisions.
| Lorsque le modèle de collision est généré par Utiliser une forme 3D courante dans l’éditeur d’objet cible, la détection de collisions entre l’objet cible tenu et les objets cibles non saisis n’est pas prise en charge. |
Solutions aux problèmes courants
Si les problèmes décrits dans cette interface surviennent durant l’application réelle, veuillez activer l’interrupteur à côté du problème correspondant et configurer les paramètres associés comme indiqué.
Problème 1: Lors de l’utilisation d’un préhenseur à vide pour saisir des objets cibles (comme la dépalletisation de cartons), le robot saisit le mauvais objet ou comprime des objets adjacents pendant le processus de prise
Lorsqu’un préhenseur à vide est utilisé pour saisir un objet cible (par exemple une boîte), si le préhenseur entre en contact étroit avec l’objet cible, le logiciel détectera une collision de nuage de points entre l’objet cible et l’outil, ce qui entraînera un échec de la prise. En supprimant le nuage de points de l’objet cible, le contact entre l’outil et l’objet cible ne sera pas détecté comme une collision. Pendant ce temps, les nuages de points des objets non saisis autres que l’objet cible seront conservés, ce qui permettra une détection normale des collisions par nuage de points afin d’éviter les prises erronées ou les collisions.
Pour garantir que le nuage de points de l’objet cible est complètement supprimé, il est généralement nécessaire d’étendre la plage de suppression vers l’extérieur le long de la surface de l’objet d’une certaine distance.
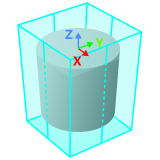
Extension de la plage de suppression du nuage de points selon l’axe Z détermine la distance étendue vers l’extérieur dans la direction verticale (axe Z) de la pose de l’objet cible, sur la base des dimensions originales de l’objet. Pour des objets cibles en forme de cylindre ou de cylindre creux, ce paramètre augmente la hauteur/longueur du cylindre.
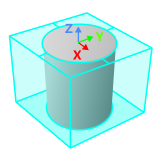
Extension de la plage de suppression du nuage de points selon les axes X/Y détermine la distance étendue vers l’extérieur dans la direction horizontale (plan XOY) de la pose de l’objet cible, sur la base des dimensions originales de l’objet. Pour des objets cibles en forme de cylindre ou de cylindre creux, ce paramètre augmente le rayon (extérieur) du cylindre.
| Extension de la plage de suppression du nuage de points selon l’axe Z | Extension de la plage de suppression du nuage de points selon les axes X/Y | |
|---|---|---|
Parallélépipède |
|
|
Cylindre |
|
|
Problème 2: Les objets cibles sont dispersés aléatoirement, ce qui rend difficile le calcul d’une trajectoire de prise réalisable
Lorsqu’un robot saisit des objets cibles (en particulier des objets dispersés aléatoirement), il est inévitable qu’il y ait contact entre l’outil et l’objet cible, ainsi qu’entre l’objet cible et d’autres objets cibles. Si un léger contact à proximité du point de prise est en fait acceptable mais est détecté comme une collision lors de la détection, entraînant un échec de la planification, les méthodes suivantes peuvent être utilisées pour résoudre le problème.
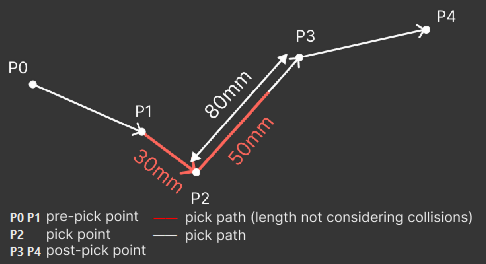
Après activation de la Détection de collisions par nuage de points ou de Détecter les collisions sur les objets cibles, une longueur de trajectoire entre le point de prise et le premier point de passage avant ou après la prise sera spécifiée, et la détection de collisions pour l’outil et l’objet cible tenu sera ignorée, ce qui facilite le calcul de trajectoires de prise plus réalisables. Cependant, les collisions entre l’outil et les objets de la scène ou les segments du robot seront toujours détectées.
L’activation de cette option peut augmenter les risques de collision. La plage exemptée de détection ne doit pas être excessivement grande afin d’éviter des collisions graves.
Si la longueur de trajectoire exemptée de détection dépasse la longueur de trajectoire entre le point de prise et le premier point de passage avant ou après la prise, la plage effective sera limitée à la longueur de trajectoire la plus courte.
Prenons l’image ci-dessous comme exemple, lorsque les longueurs exemptées de détection avant et après la prise sont toutes deux définies à 50mm, tandis que la longueur de trajectoire effective réelle avant la prise est de 30mm.
Problème 3: Pour la palettisation mixte, les boîtes ont tendance à entrer en collision car leurs dimensions varient
Une certaine épaisseur sera ajoutée au bas du modèle de collision de la boîte. Le modèle de collision épaissi sera utilisé dans la détection de collisions, évitant ainsi des collisions entre la boîte tenue et les boîtes adjacentes lors de la palettisation. L’Épaisseur augmentée au bas ne prendra effet que lorsque l’étape Palettisation mixte est utilisée pour la planification de trajectoire.