Configuration du modèle de collision
Vous pouvez ajuster les dimensions du modèle de collision pendant la phase de construction du projet afin de rendre la détection de collisions plus précise et efficace.
Modèle de scène
L’ajout d’un modèle d’objet de scène permet de représenter la scène dans le logiciel, ce qui facilite le calcul d’un chemin de mouvement du robot exempt de collisions.
Les modèles de scène doivent répondre aux exigences suivantes :
-
Complet: Ajoutez autant que possible les modèles de scène de tous les objets situés dans la zone d’action du robot afin d’éviter tout risque potentiel de collision.
-
Précision: Des poses ou des dimensions inexactes du modèle de scène peuvent entraîner une surdétection ou des détections manquées de collisions.
-
Autoriser une marge de sécurité: Pour garantir le fonctionnement sûr du robot, vous pouvez augmenter la taille des modèles d’objets concernés lorsque nécessaire afin de fournir une marge de sécurité suffisante. Pour les emplacements nécessitant une grande précision de détection de collisions (comme près du point de prise), le modèle de scène doit correspondre étroitement aux dimensions réelles afin d’éviter des échecs de calcul dus à des dimensions augmentées. Pour les emplacements dont l’exigence de précision de détection de collisions est faible mais avec des exigences élevées en matière de sécurité opérationnelle (comme les modèles de caméra dans le scénario ETH), le modèle de scène doit inclure une marge de sécurité suffisamment grande.
-
Simplification du modèle: Si le modèle de scène contient trop de détails, cela n’améliorera pas la précision de la détection de collisions et augmentera significativement le temps de calcul.
Les méthodes recommandées pour construire un modèle de scène sont les suivantes :
-
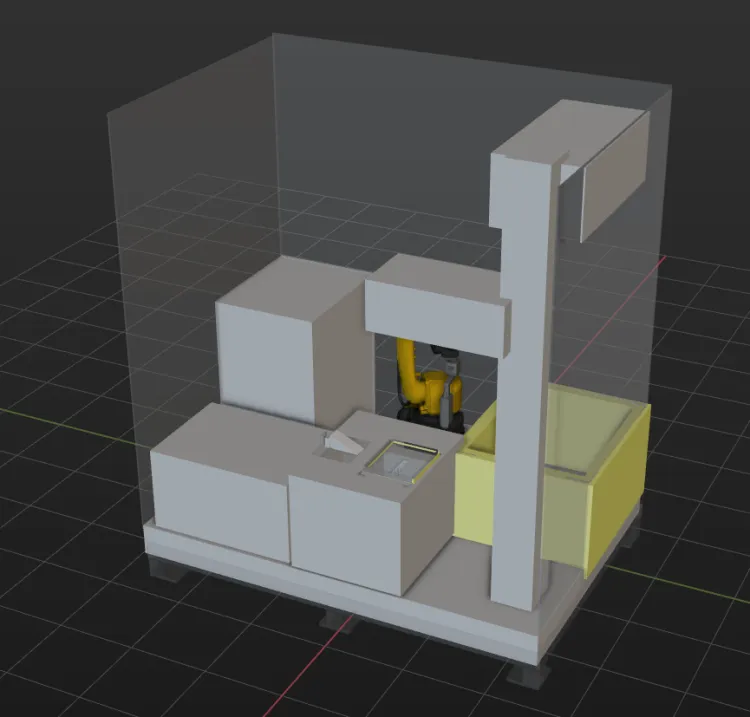
Pour améliorer l’efficacité de la détection de collisions, il est recommandé de créer un modèle en forme de parallélépipède ou de cylindre pour recouvrir le modèle personnalisé dans la zone de simulation 3D (comme montré ci-dessous).
-
Si le scénario réel ne contient pas de barrière de sécurité, vous pouvez créer un mur simulé à l’aide de l’objet de scène parallélépipédique. Lorsque la détection de collisions est activée, cela empêchera efficacement le robot de dépasser le poste de travail.
-
Il est recommandé de manœuvrer manuellement le robot pour s’approcher des objets du poste de travail et de synchroniser les poses du robot dans le logiciel Mech-Viz. Cela vous permet de vérifier si le robot entrera en collision avec les modèles de scène créés.
-
Lors de la création d’un objet de scène, il est recommandé d’inclure une marge de sécurité d’au moins 5 mm pour garantir la sécurité.
-
Si un objet de scène de type parallélépipède, bac ou cylindre coïncide avec le modèle personnalisé, ouvrez la fenêtre Scene Object Configuration et désélectionnez la case Involve in collision detection pour arrêter la détection de collisions avec le modèle personnalisé. Seuls les objets de scène de type parallélépipède, bac ou cylindre seront pris en compte pour la détection de collisions.
| Pour les stations ayant subi un calibrage des paramètres extrinsèques de la caméra, vous pouvez capturer une image afin de vérifier si le nuage de points coïncide avec le modèle pour en garantir la précision. |
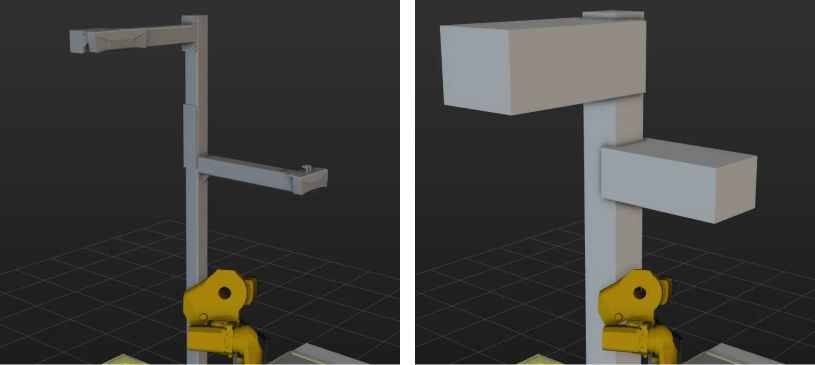
Modèle de caméra
Lors de la construction d’un modèle de scène, il est recommandé de placer un objet de scène de type parallélépipède à la position de montage de la caméra réelle, afin d’éviter des collisions entre le robot et la caméra réelle.
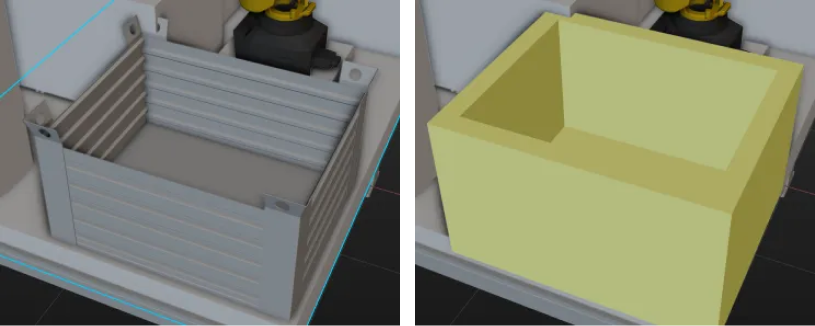
Modèle de bac
Vous pouvez créer un modèle de scène de type Bin dans Mech-Viz ou importer un modèle de scène de type Custom model pour la détection de collisions. Ci-dessous figurent les avantages et inconvénients des deux méthodes :
-
Créer un modèle de scène de type bac
-
Avantage: La taille du modèle peut être ajustée manuellement, ce qui permet des paramètres de détection de collisions plus stricts. Il est recommandé d’augmenter l’épaisseur du bac parallélépipédique de 5 mm.
-
Inconvénient: Le bac réel, qui n’est généralement pas un parallélépipède standard, peut différer du bac modèle créé. Si le modèle de bac est plus grand que le bac réel, les objets cibles proches des parois du bac peuvent se retrouver intégrés dans le modèle de bac, réduisant le taux de vidage du bac. Si le bac réel est plus grand que le modèle de bac, les parois du bac peuvent être rayées lors de la prise réelle.
-
-
Importer un modèle de bac personnalisé
-
Avantage: Le modèle personnalisé correspond étroitement à la forme du bac réel, évitant les fausses détections près des parois du bac lors de la prise des objets cibles. Recommandé pour les scénarios de bacs de forme spéciale.
-
Inconvénient: Des erreurs d’usinage ou des déformations peuvent provoquer des différences entre le bac réel et le modèle personnalisé importé, entraînant une surdétection des collisions ou des détections manquées.
-
Lorsque les poses des bacs entrants varient sur site, vous devez déterminer les poses réelles des bacs via la reconnaissance visuelle et ajuster en conséquence les poses des modèles de bac dans la zone de simulation 3D afin d’assurer une détection de collisions fiable. Pour plus d’instructions, reportez-vous à Mettre à jour la pose du bac dans Mech-Viz.
Modèle d’outil
Dans la version 2.0.0, les modèles de collision pour les outils sont pris en charge aux formats OBJ et STL. Il est recommandé d’utiliser en priorité le modèle de collision au format OBJ.
Comme le modèle STL est creux, le système ne peut détecter que la collision entre sa surface extérieure et le nuage de points pendant la détection de collisions sur nuage de points, et il est donc difficile d’évaluer précisément la gravité de la collision. De plus, il est difficile de définir un seuil de collision stable pour les modèles STL. À l’inverse, le modèle OBJ est solide et plus adapté à la détection de collisions des outils d’extrémité.
Si vous devez utiliser le modèle d’outil au format STL, il est recommandé de définir la forme du nuage de points pour la détection de collisions sur Colonne de nuage de points pour l’objet cible et l’objet de scène. Dans ce cas, les modèles de collision de l’objet cible et de l’objet de scène peuvent être considérés comme solides, réduisant le risque de détections manquées.
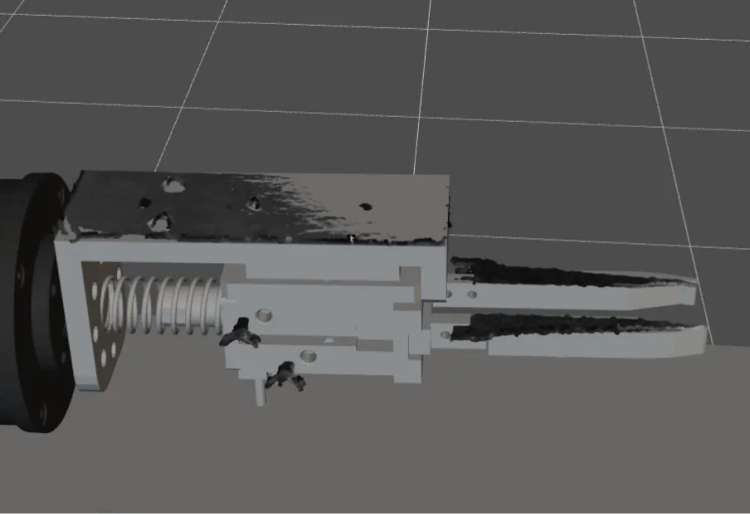
Créer le modèle d’outil au format OBJ
Vous pouvez utiliser l’Éditeur de modèles pour créer des coques convexes sur la base de modèles STL ou STEP et les convertir au format OBJ. Pour gagner du temps lors de la création d’un modèle de collision pour l’outil d’extrémité, il n’est pas toujours nécessaire de reproduire chaque détail du modèle original dans les coques convexes. Vous pouvez omettre certains détails selon les exigences spécifiques, comme illustré ci-dessous.
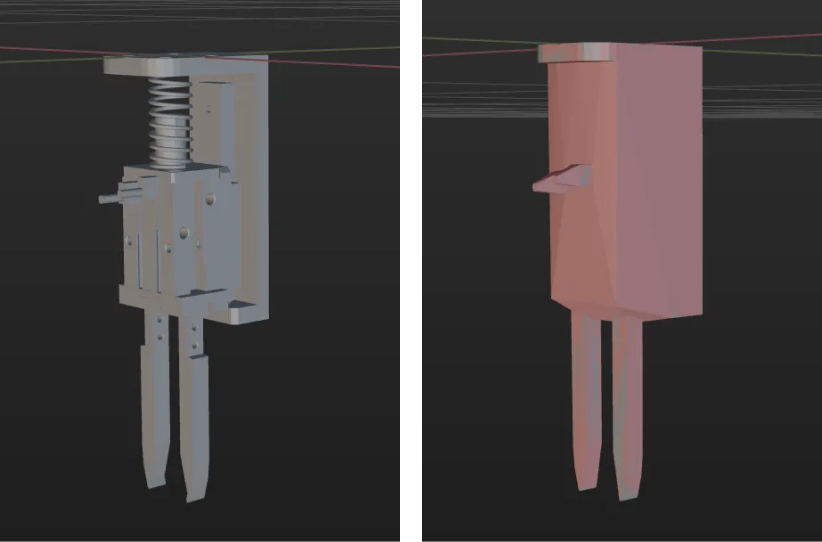
Approche simplifiée
-
Les doigts de la pince doivent être modélisés avec autant de détails que possible afin de représenter fidèlement leur forme physique, garantissant la précision de la détection de collisions et le taux de réussite de la planification de trajectoire.
-
Pour les structures mécaniques plus éloignées des doigts de la pince, la conception peut être simplifiée en utilisant des coques convexes parallélépipédiques plutôt que des conceptions structurelles complexes afin d’améliorer l’efficacité.
Vérification du modèle d’outil
Pour les stations ayant subi un calibrage des paramètres extrinsèques de la caméra, vous pouvez capturer une image et vérifier si le nuage de points de l’outil coïncide avec le modèle.