Configuration de la communication du robot
Dans ce tutoriel, vous apprendrez à charger les fichiers du programme Interface Standard sur le robot ABB, et à configurer la communication via l’Interface Standard entre le système de vision Mech-Mind et le robot.
|
Préparation avant le chargement
Vérifier la compatibilité du contrôleur et du logiciel
-
Le robot est un robot à 4 axes ou 6 axes. Cette section prend ABB_IRB6700_150_3_20 comme exemple.
-
Le contrôleur du robot est IRC4 ou IRC5, et la version de RobotWare est comprise entre 6.02 et 6.15.
-
L’option RobotWare 616-1 PC Interface est installée.
Cliquez ici pour les instructions
-
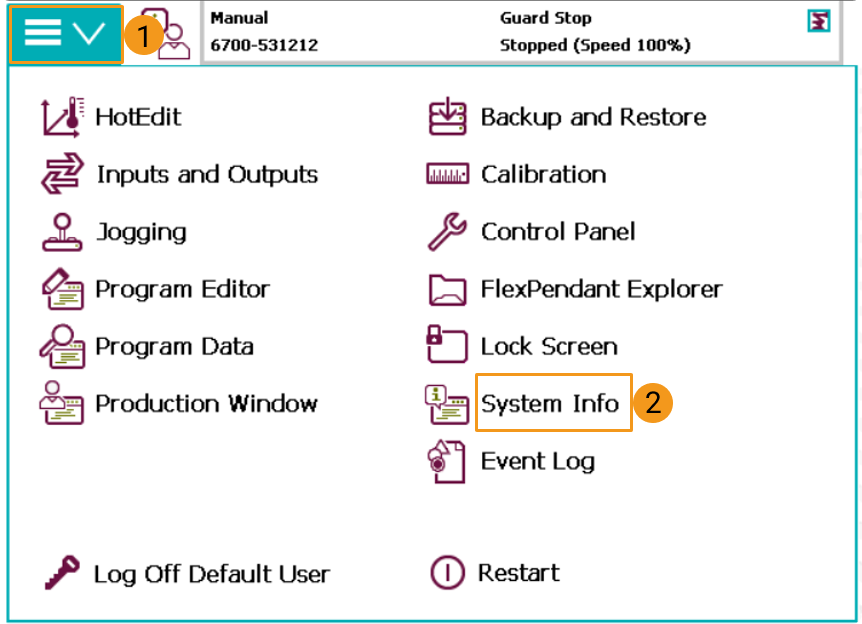
Touchez le bouton déroulant dans la barre de menu en haut à gauche de l’interface du pupitre d’enseignement et sélectionnez Informations système.
-
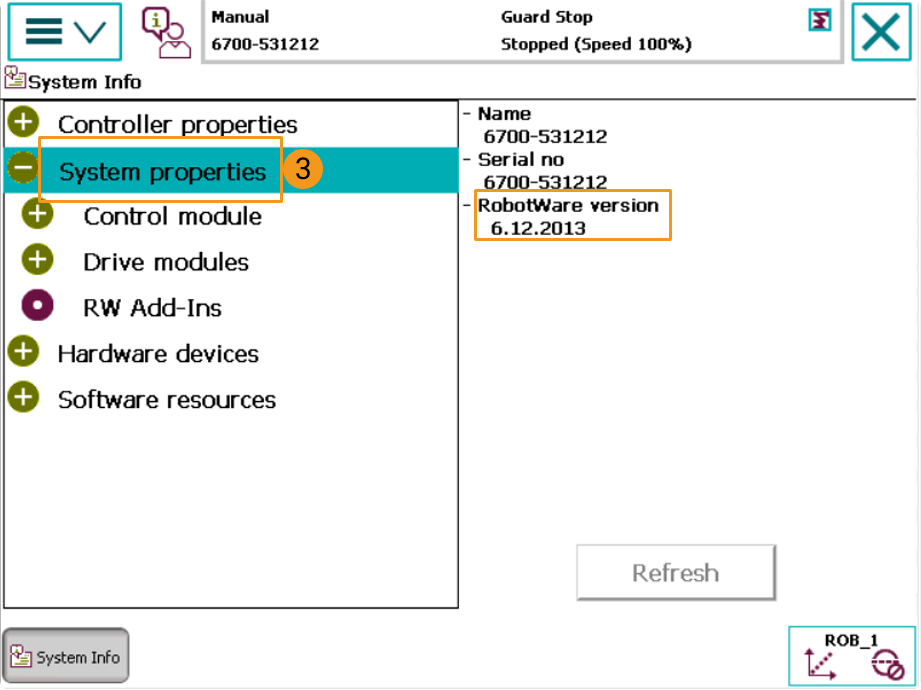
Touchez Propriétés du système et vérifiez si la version de RobotWare est supérieure à 6.02.
-
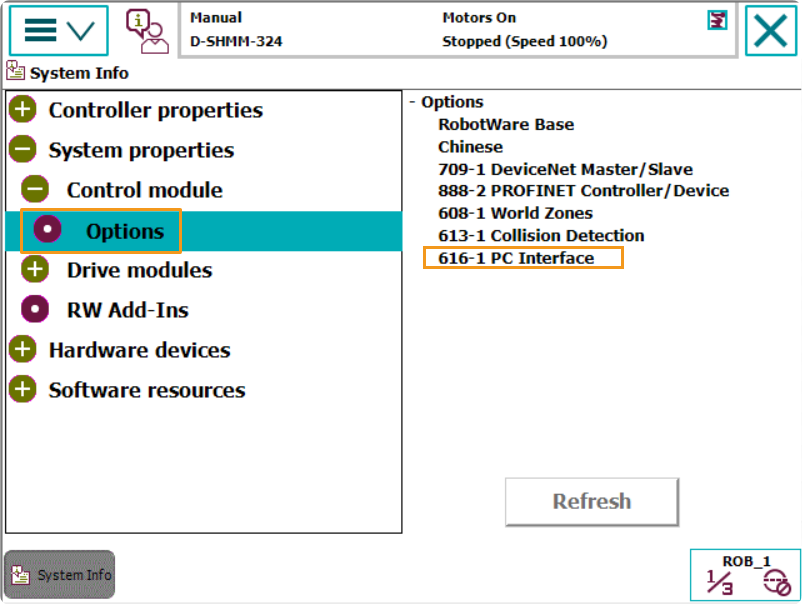
Touchez Options, et vérifiez si le module de contrôle 616-1 PC Interface est installé.
-
| Si les conditions précédentes ne sont pas remplies, le système de vision ne peut pas communiquer avec le robot via l’Interface standard. Contactez le fabricant du robot pour obtenir de l’assistance. |
Configurer la connexion réseau
Connecter le matériel
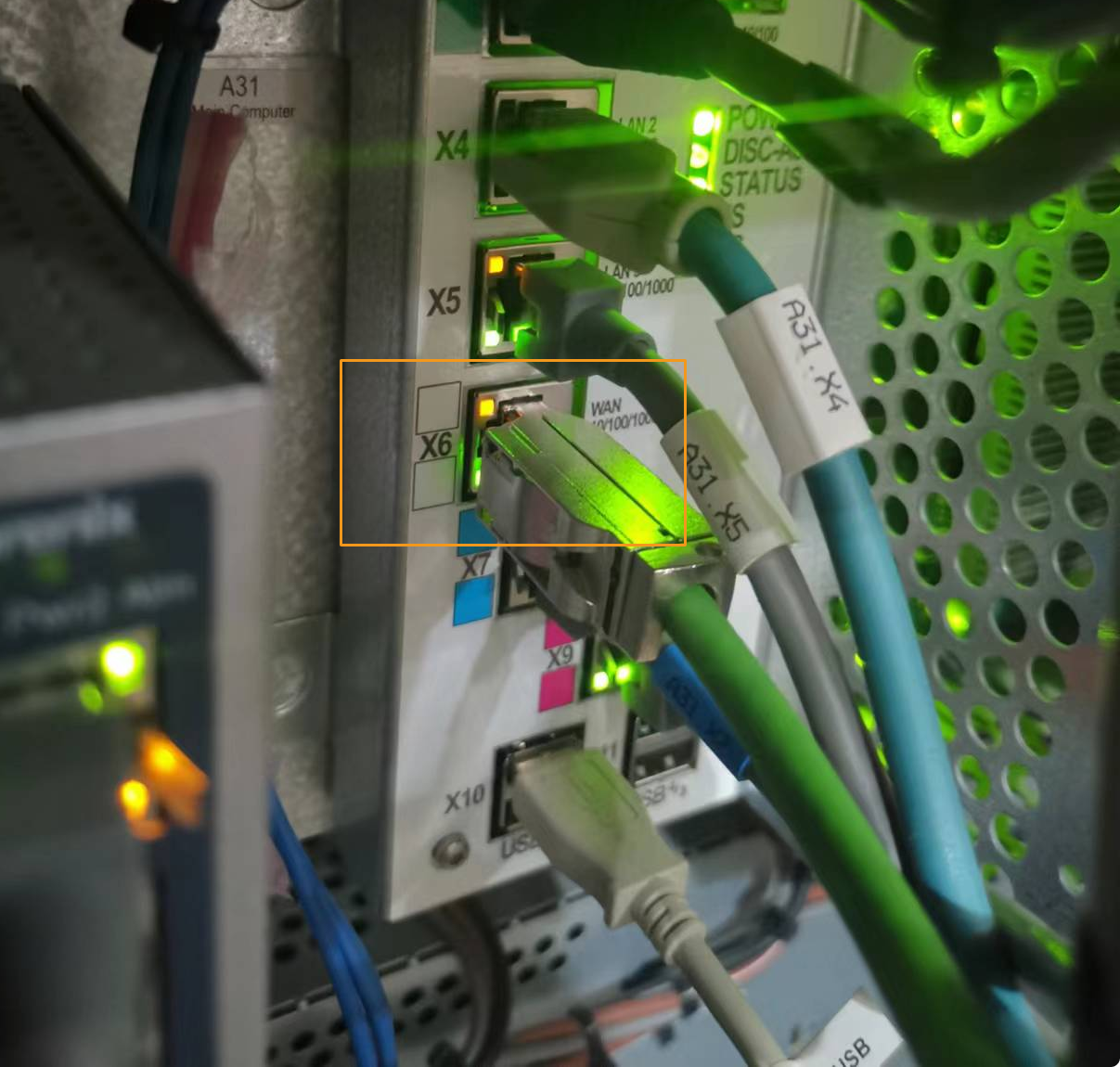
Branchez le câble Ethernet de l’IPC sur le port X6 (WAN) du contrôleur du robot, comme illustré ci-dessous.
Configurer les adresses IP
Veuillez configurer l’adresse IP du robot sur le même sous-réseau que celui de l’IPC. Vous pouvez définir l’adresse IP à l’aide du pupitre d’enseignement ou de RobotStudio. Cette section présente comment utiliser le pupitre d’enseignement pour définir l’adresse IP. Pour plus d’informations sur l’utilisation de RobotStudio pour configurer l’adresse IP, veuillez vous référer à Définir l’adresse IP dans RobotStudio.
-
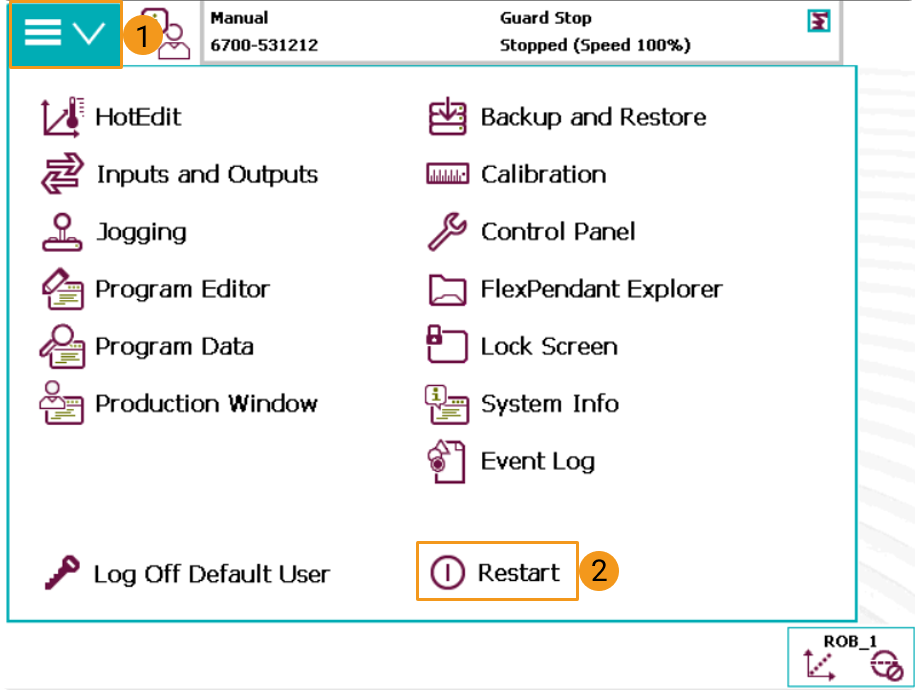
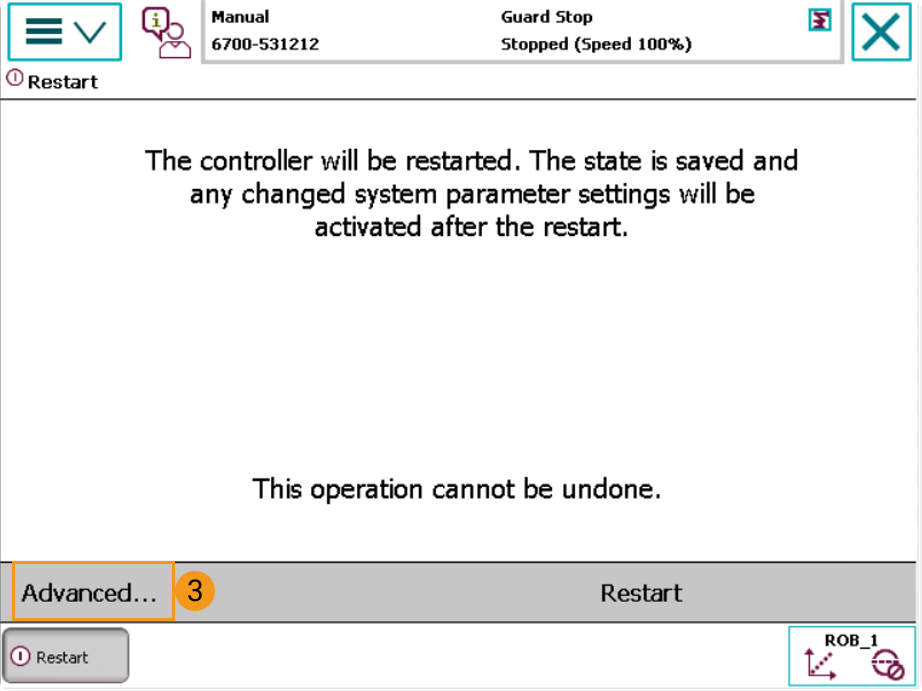
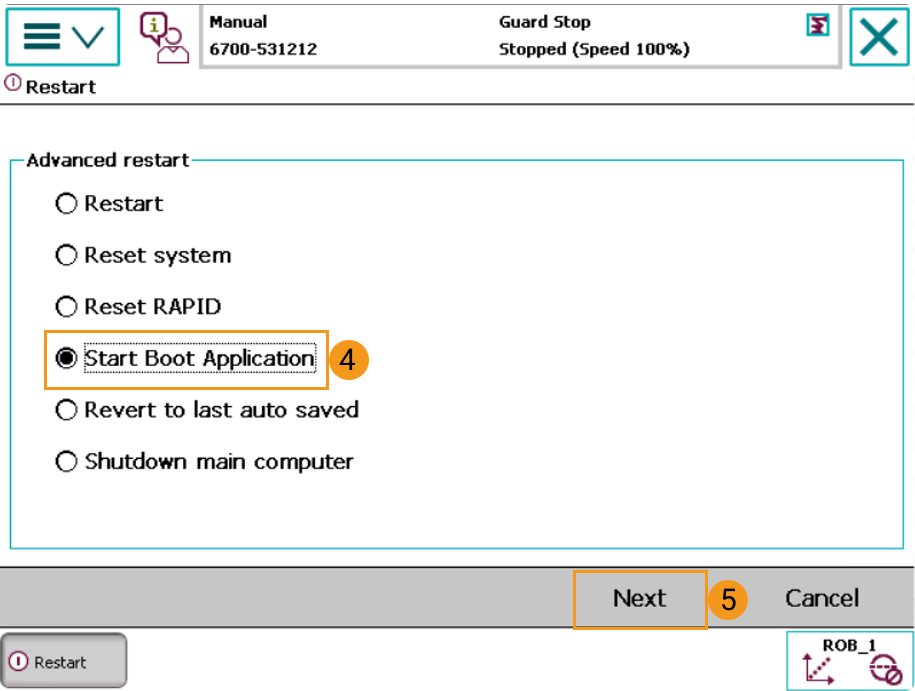
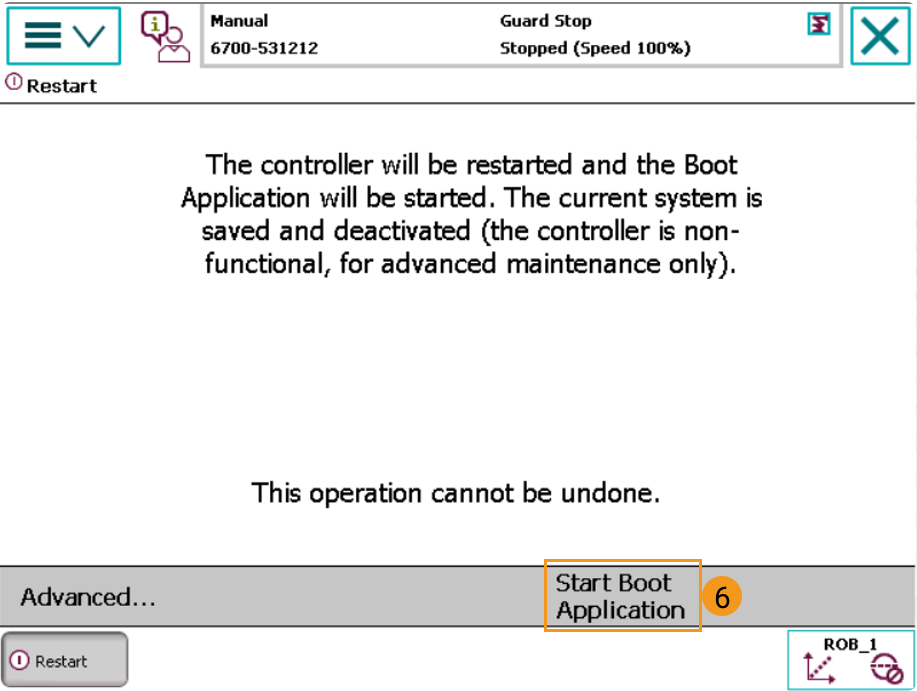
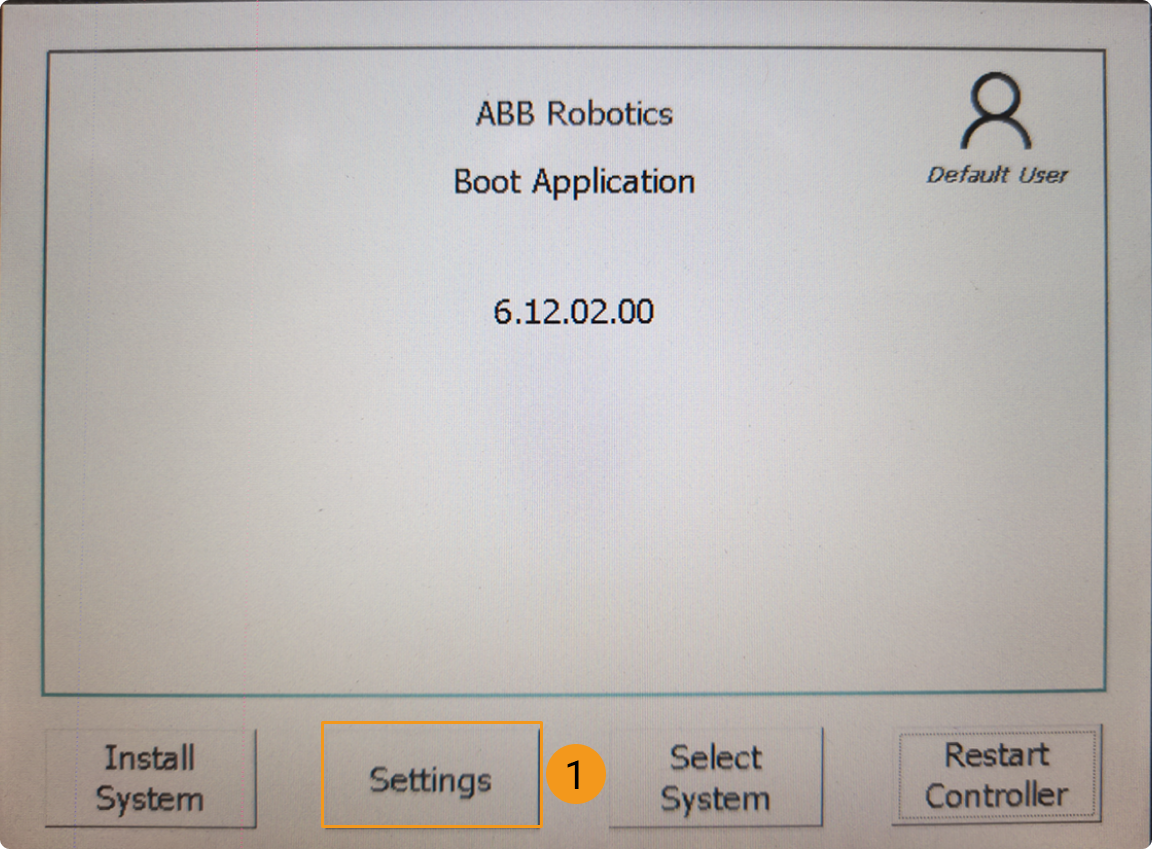
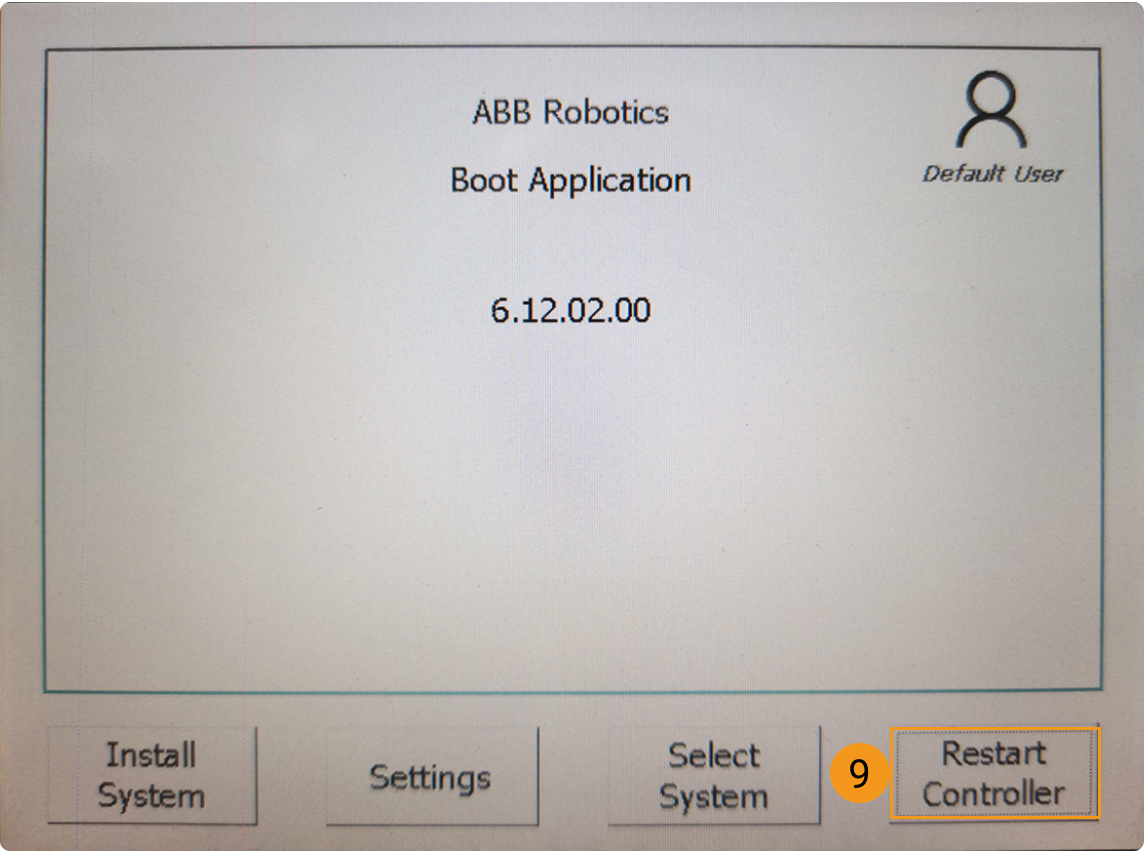
Suivez les étapes illustrées ci-dessous pour démarrer l’application de démarrage.
-
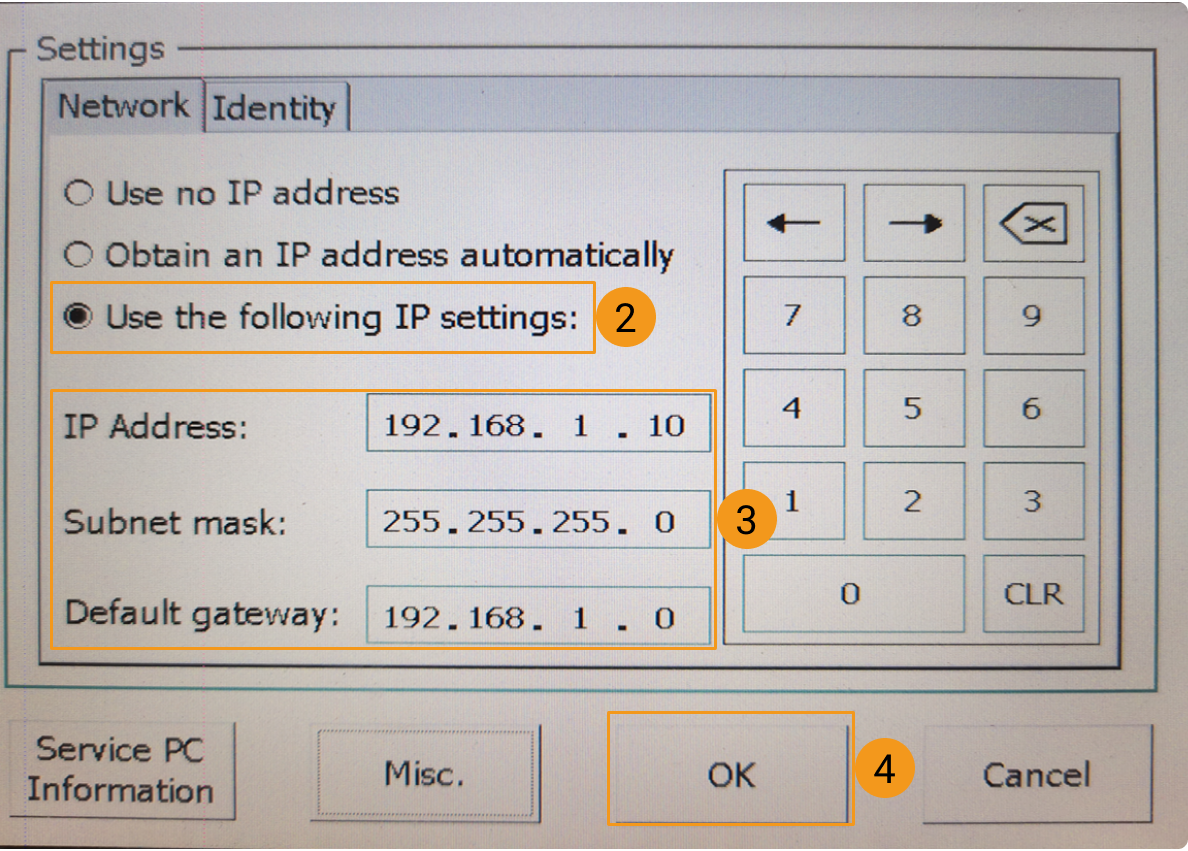
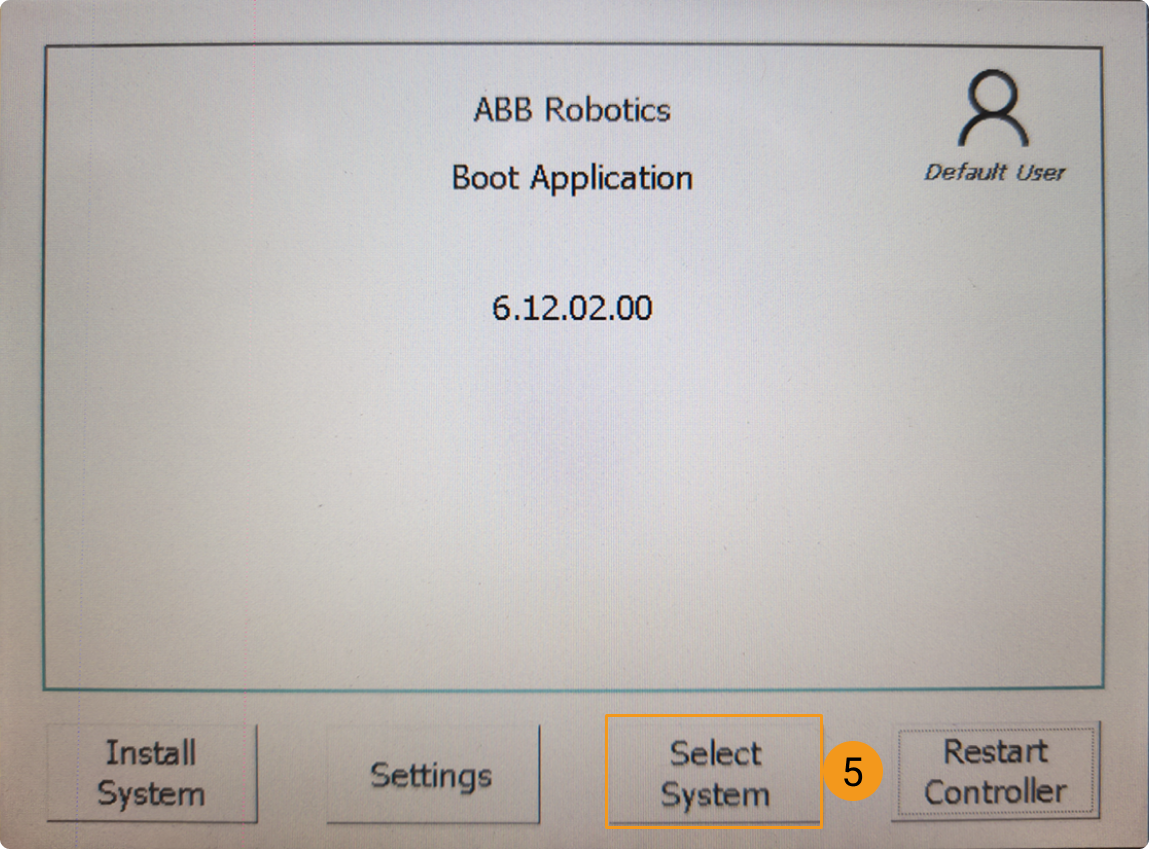
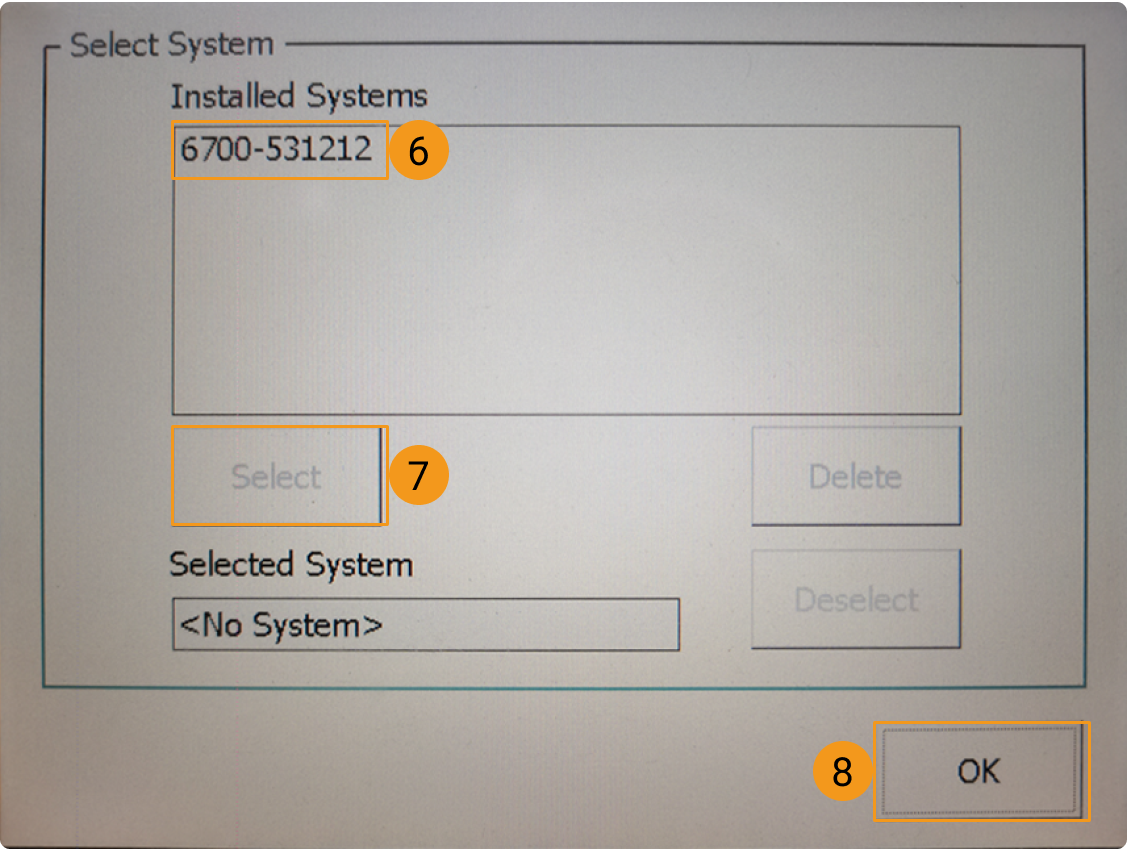
Après l’achèvement du redémarrage, l’interface suivante apparaît. Suivez les étapes ci-dessous pour configurer l’adresse IP. Les adresses IP du robot et de l’IPC doivent se trouver sur le même sous-réseau.
Créer un projet Mech-Vision et l’enregistrer
-
Ouvrez Mech-Vision. Si l’interface de bienvenue présentée ci-dessous s’affiche, cela indique que Mech-Vision a démarré avec succès.
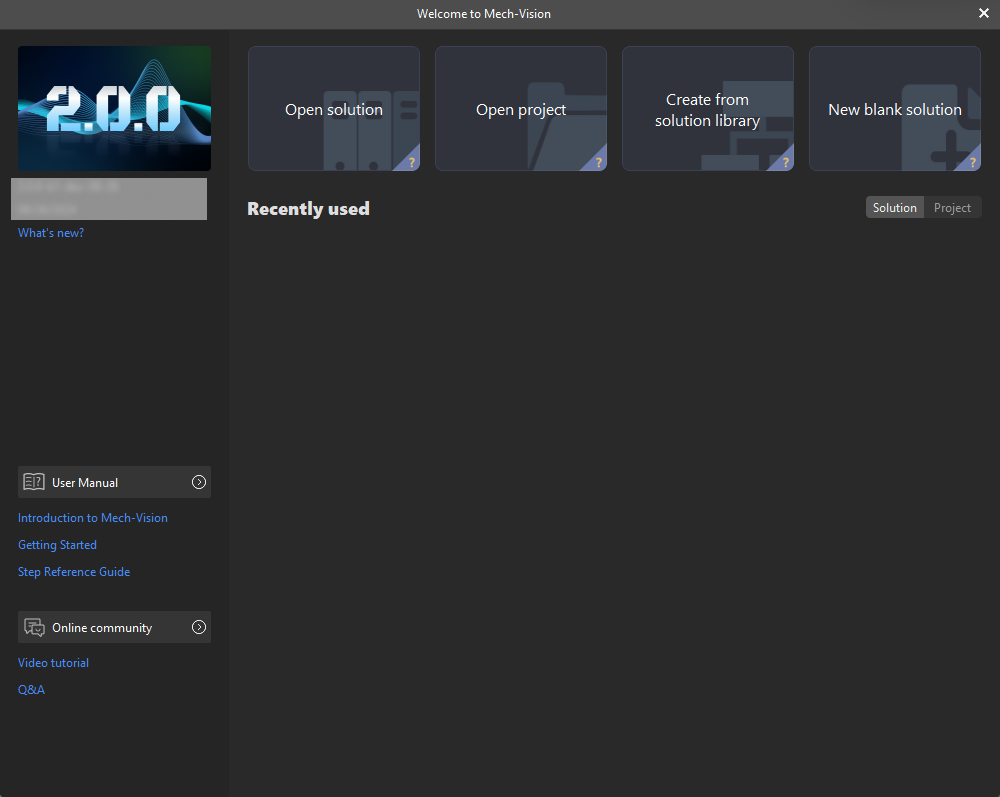
-
Dans l’interface de bienvenue de Mech-Vision, cliquez sur Créer à partir de la bibliothèque de solutions pour ouvrir la Bibliothèque de solutions.

La Bibliothèque de solutions est une bibliothèque de ressources qui fournit des solutions ou des projets typiques (avec des données d’exemple) provenant de divers scénarios d’application. -
Dans l’onglet Modèle d’application de la Bibliothèque de solutions, sélectionnez la solution Single-Case Depalletizing, comme illustré ci-dessous.
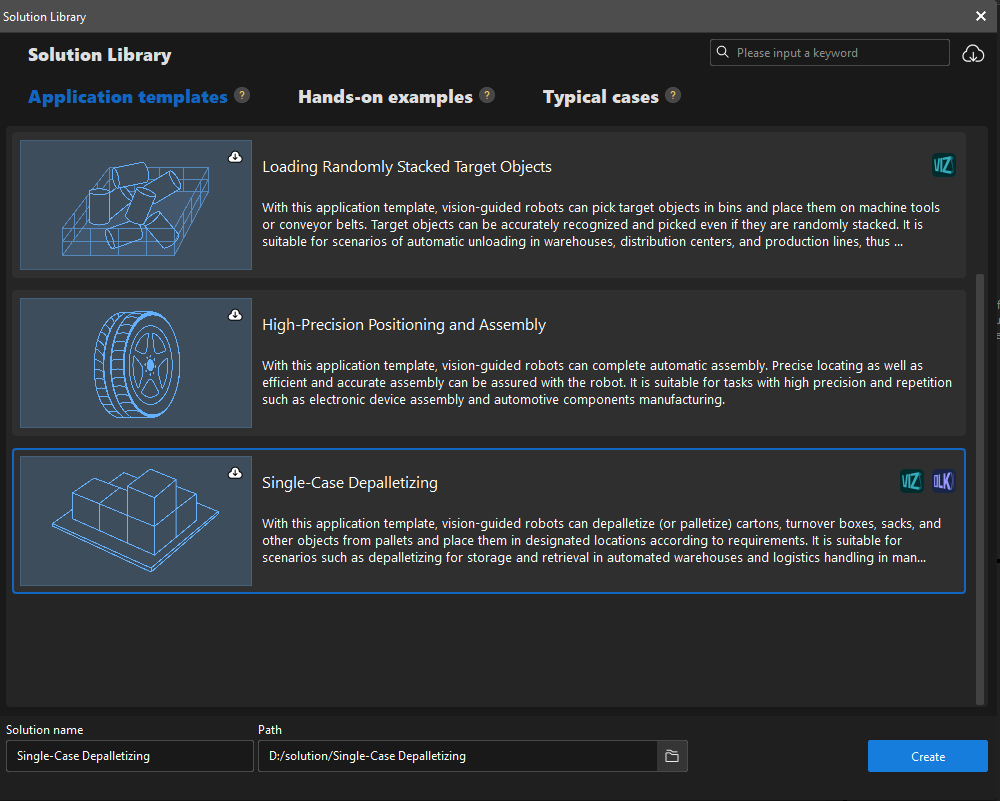
Si vous ne trouvez pas la solution Single-Case Depalletizing dans la Bibliothèque de solutions, cliquez sur l’icône Télécharger dans l’angle supérieur droit.
-
Définissez le nom et le chemin de la solution, puis cliquez sur Créer.
Après la création du projet, la solution et le projet créés s’affichent dans la liste des projets dans le coin supérieur gauche de l’interface principale de Mech-Vision.
-
Une solution est un ensemble de configurations et de données liées aux robots et à la communication avec les robots, au traitement de vision, à la planification de trajectoire, etc., nécessaires pour l’application de vision industrielle.
-
Un projet est un flux de travail de traitement de vision dans la solution. Normalement, une solution ne contient qu’un seul projet Mech-Vision, mais elle peut en contenir plusieurs dans des scénarios d’application complexes.
-
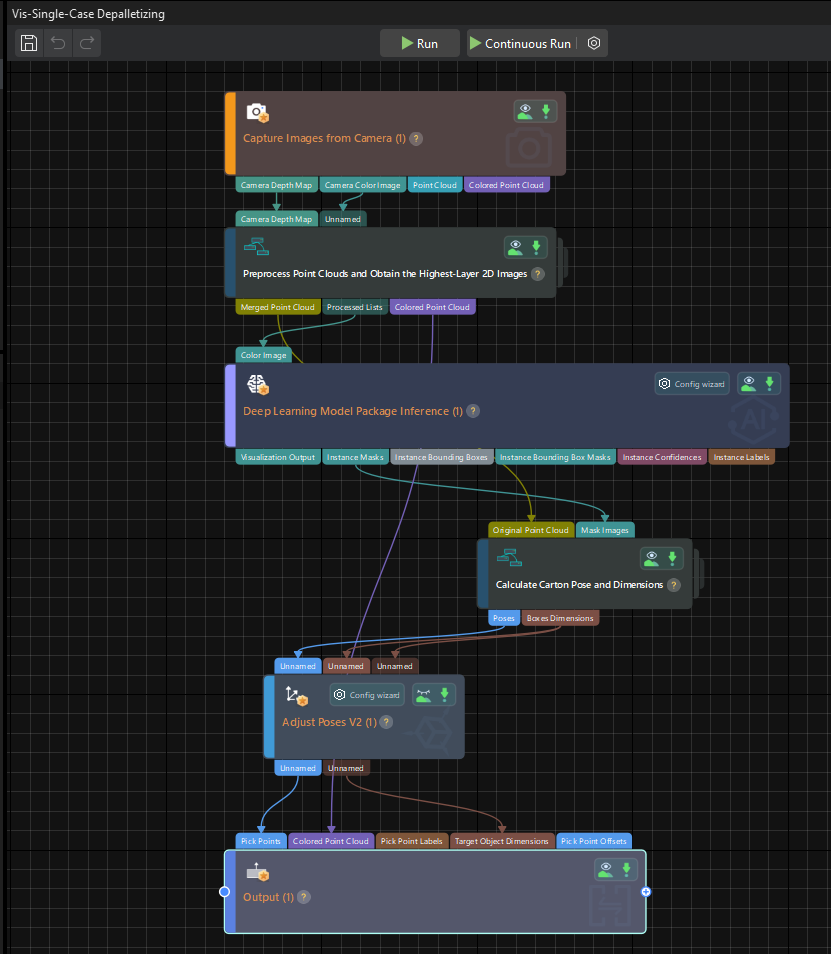
La solution Single-Case Depalletizing ne contient qu’un seul projet “Vis_Single_Case_Depalletizing”.
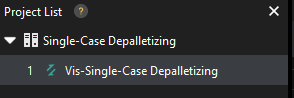
Dans l’Espace de programmation graphique de l’interface principale, le flux de travail du projet “Vis_Single_Case_Depalletizing” est affiché.
-
-
Dans la liste des projets, cliquez avec le bouton droit sur la solution, puis sélectionnez Chargement automatique de la solution.
Une fois le chargement automatique défini pour cette solution, le nom du projet s’affiche en vert et l’ID du projet s’affiche à gauche du nom du projet.
L’ID du projet sera utilisé par le programme de prise et de dépose du robot pour déclencher l’exécution du projet Mech-Vision. -
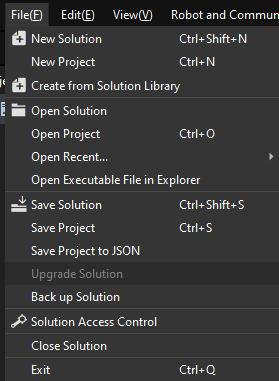
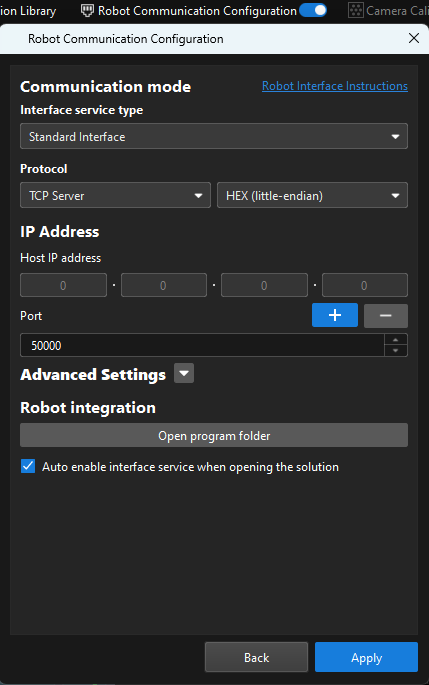
Dans la barre de menus, sélectionnez .
Charger les fichiers de programme sur le robot (automatique)
Vous pouvez suivre les instructions ci-dessous pour charger automatiquement les programmes de l’Interface standard ou les programmes d’exemple de l’Interface standard sur le robot. Cette section présente uniquement comment charger automatiquement le programme de l’Interface standard. Le processus de chargement automatique du programme d’exemple de l’Interface standard est similaire.
|
-
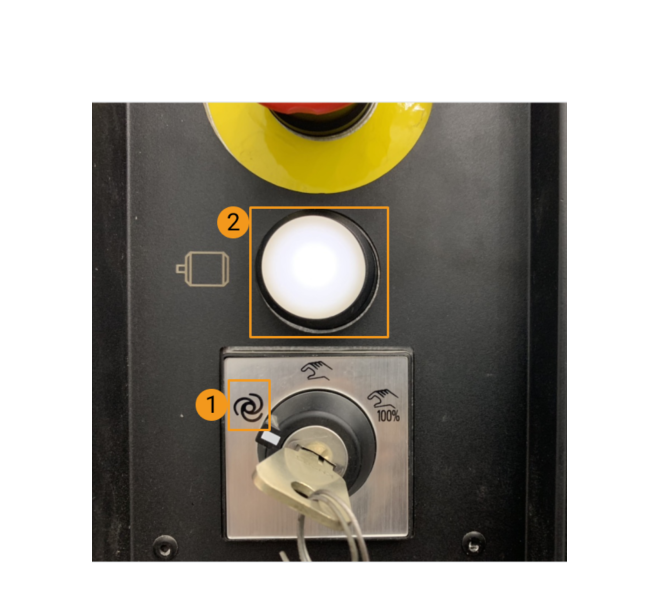
Tournez la clé sur le contrôleur en mode automatique, et assurez-vous que le témoin moteur est allumé.
-
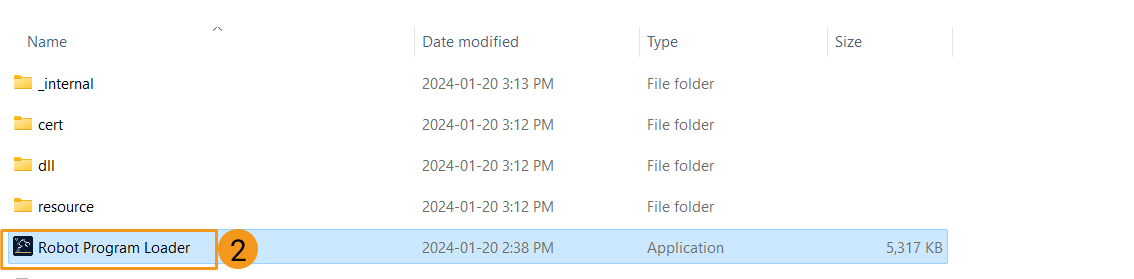
Accédez au répertoire d’installation de Mech-Vision et Mech-Viz, allez dans le dossier Robot Program Loader via le chemin
Communication Component/tool/Robot Program Loader, puis double-cliquez sur le programme Robot Program Loader pour ouvrir le chargeur. L’interface principale du chargeur apparaît.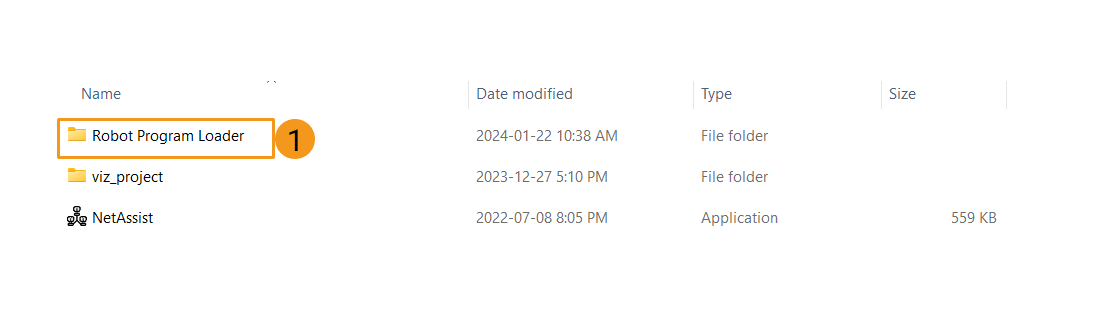
Pour changer la langue dans le chargeur, sélectionnez une langue différente dans la liste déroulante en haut à droite et redémarrez le chargeur pour que la nouvelle langue prenne effet. -
Sélectionnez la marque de robot ABB, saisissez l’adresse IP réelle du robot, puis cliquez sur Connexion.
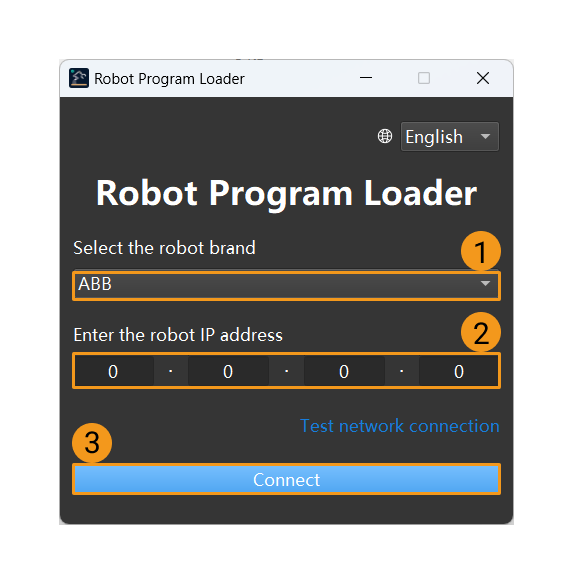
Si la connexion échoue, cliquez sur Tester la connexion réseau dans le coin inférieur droit pour résoudre le problème. -
Dans l’interface Chargement de programme ABB, sélectionnez un dossier pour stocker les fichiers de sauvegarde puis cliquez sur Sauvegarder. Si les fichiers sont sauvegardés, un message indiquant que la sauvegarde a réussi s’affiche dans la section Journal.
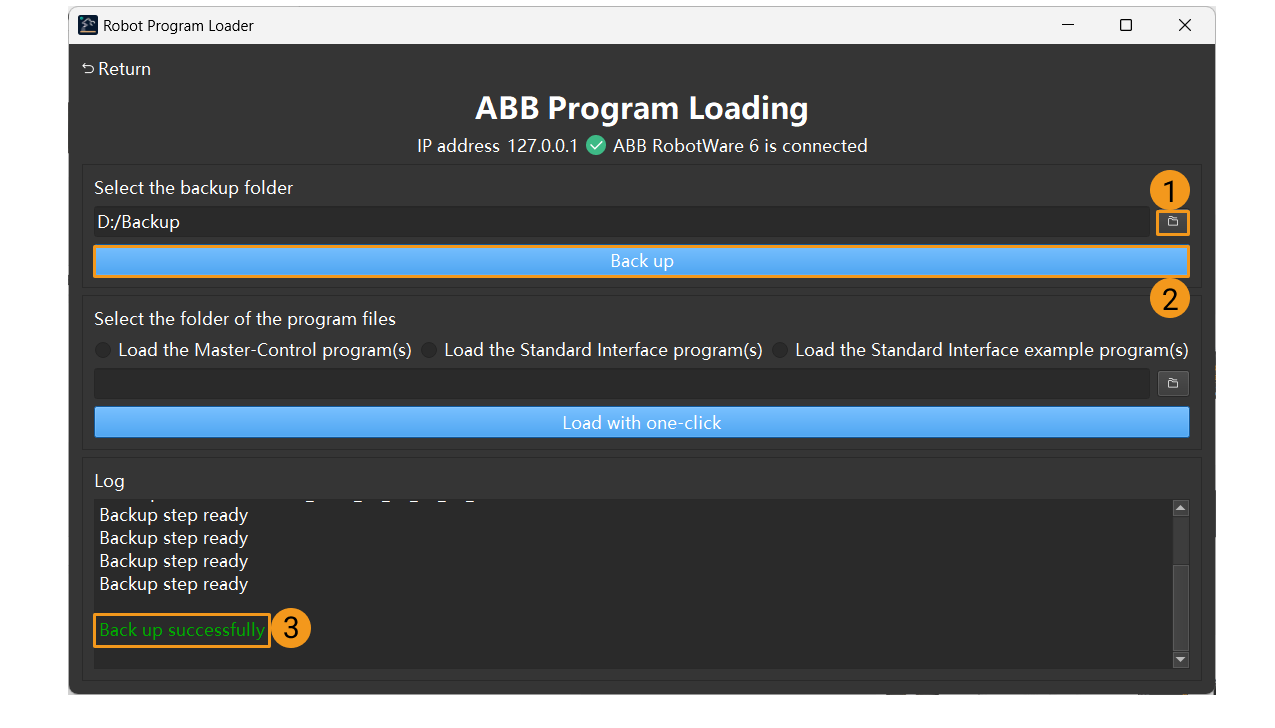
Si des erreurs surviennent dans le processus de chargement ultérieur, les fichiers peuvent être utilisés pour réinitialiser le système du robot. -
Après la réussite de la sauvegarde, sélectionnez Charger le programme d’interface standard pour confirmer le dossier qui stocke les fichiers du programme, puis cliquez sur Charger en un clic. Si les fichiers sont chargés sur le robot, un message indiquant que les fichiers du programme ont été chargés avec succès apparaît dans la section Journal.
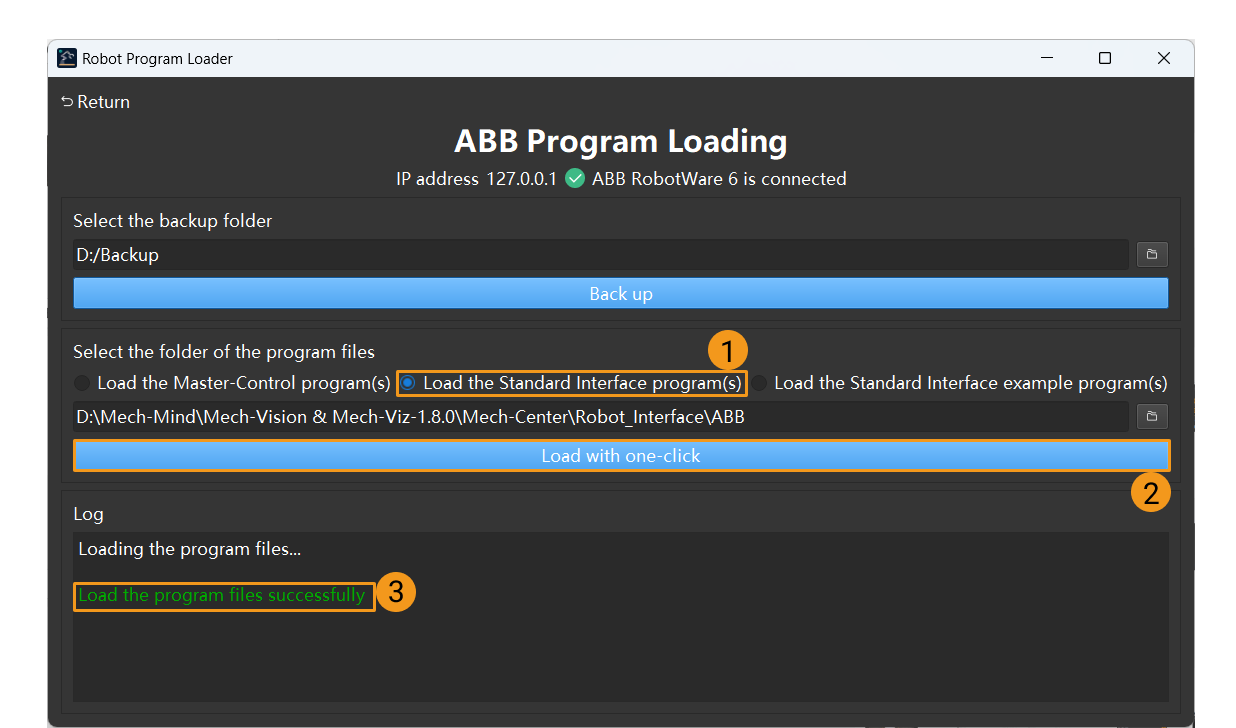
| Si vous souhaitez charger des programmes d’exemple de l’interface standard, sélectionnez Charger les programmes d’exemple de l’interface standard, puis cliquez sur Charger en un clic. |
Tester la communication de l’Interface standard
Sélectionner et modifier le programme utilisé pour le test de communication
-
Placez l’interrupteur sur le contrôleur en mode automatique.
-
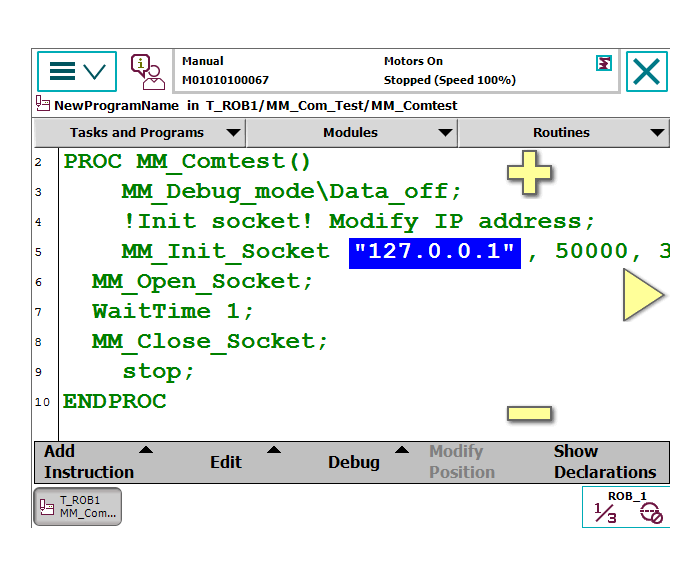
Sur le pupitre d’enseignement, touchez le menu dans le coin supérieur gauche, sélectionnez , sélectionnez MM_Com_Test, puis sélectionnez Afficher le module.
Si vous ne trouvez pas MM_Com_Test après avoir sélectionné T_ROB1 et que le code du programme s’affiche, sélectionnez Tâches et Programmes dans la partie supérieure. Dans l’interface Tâches et Programmes, confirmez que T_ROB1 est sélectionné puis sélectionnez Afficher les modules pour faire apparaître MM_Com_Test. 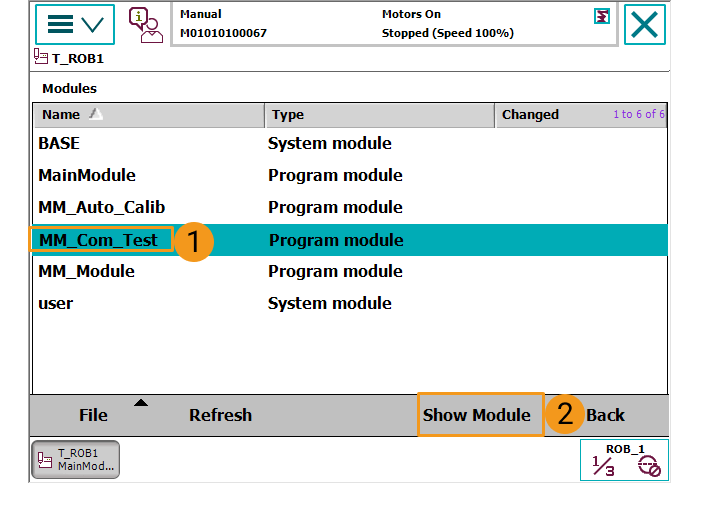
-
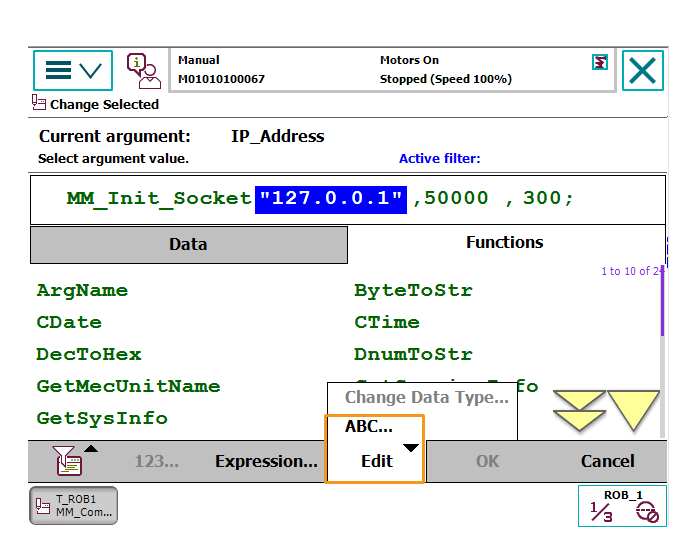
Touchez deux fois l’adresse IP, sélectionnez , changez l’adresse IP pour celle de l’IPC, puis sélectionnez OK. Si le numéro de port hôte défini dans Mech-Vision a été modifié, le numéro de port 50000 ici doit être remplacé par le numéro de port hôte dans Mech-Vision.
Exécuter le programme et tester la connexion
-
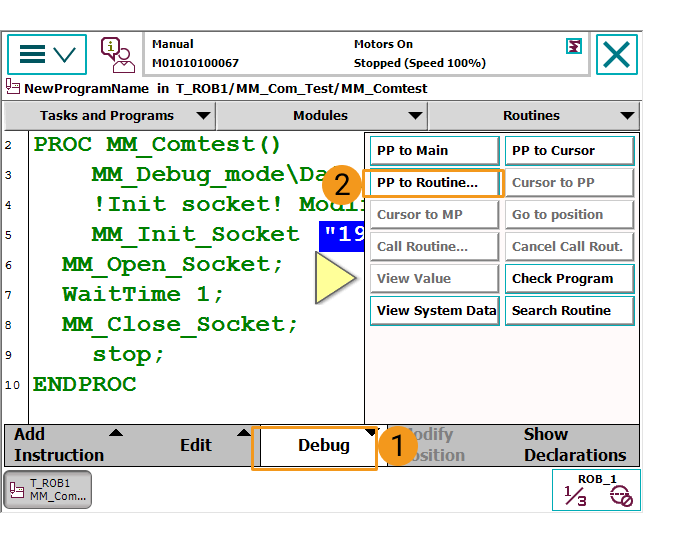
Dans l’interface suivante, sélectionnez .
-
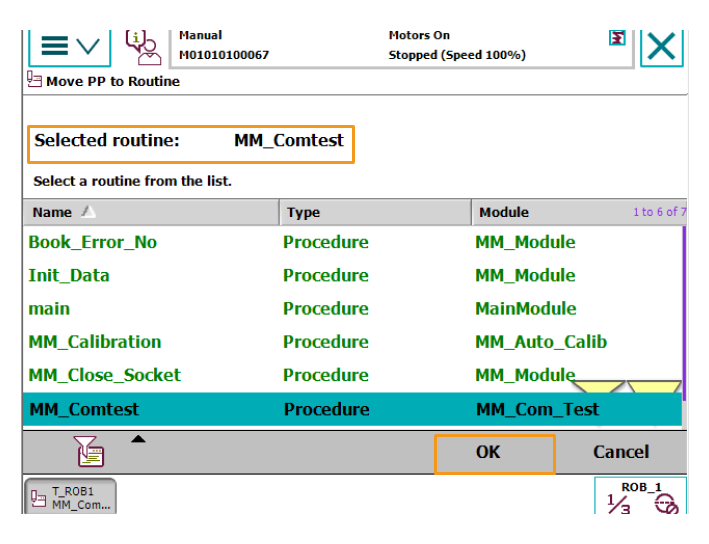
Confirmez que MM_Comtest est sélectionné et cliquez sur OK.
-
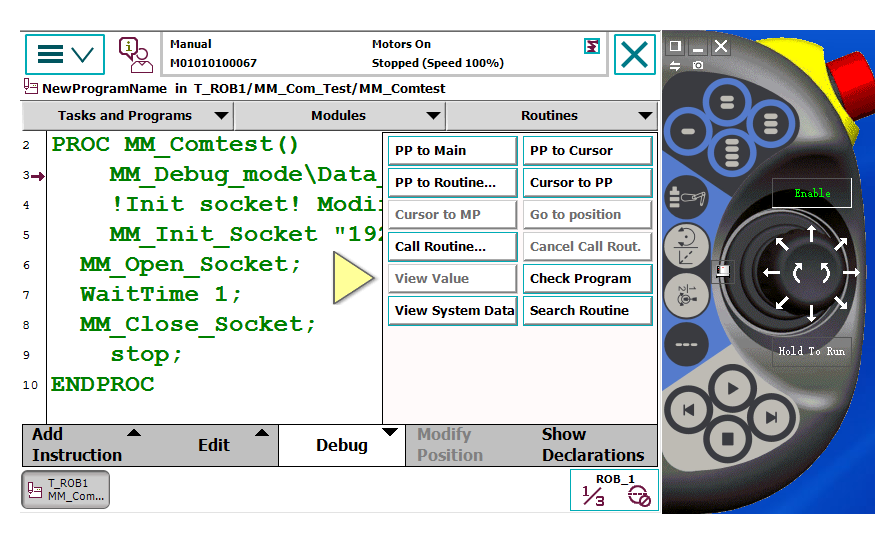
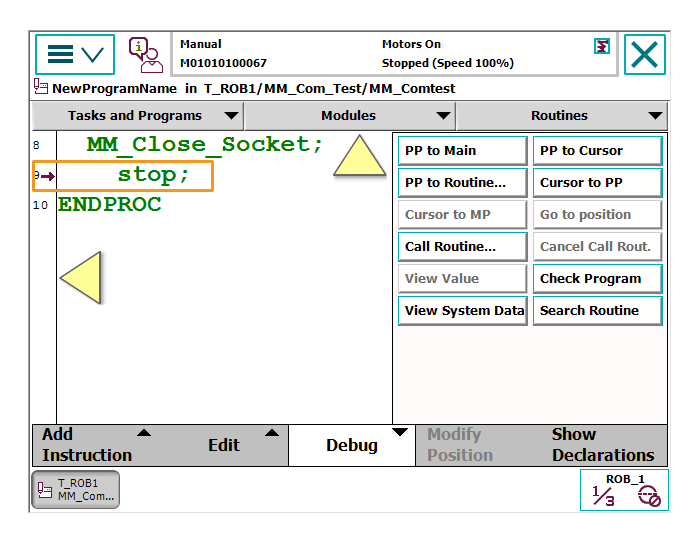
Maintenez le bouton d’activation situé sur le côté droit du pupitre d’enseignement enfoncé (assurez-vous de ne pas le relâcher pendant l’exécution du programme). Puis, appuyez à plusieurs reprises sur le bouton suivant pour avancer manuellement pas à pas dans le programme jusqu’à ce que le pointeur de programme atteigne la ligne 9.
-
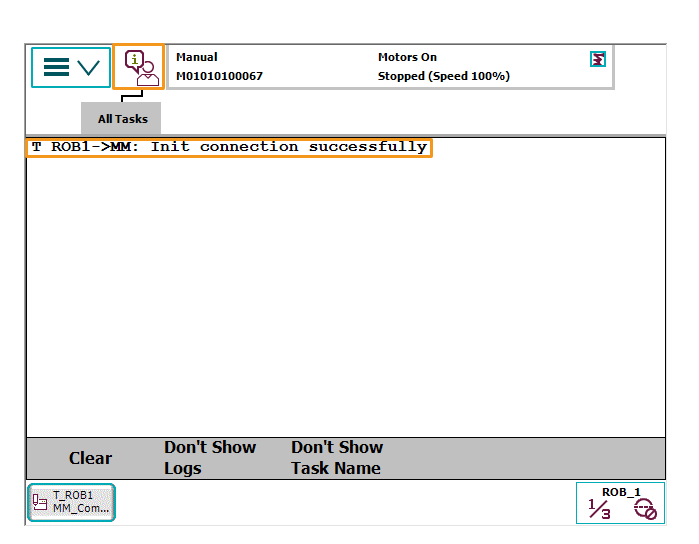
Touchez le bouton suivant pour afficher le message suivant.
-
Si la communication entre le robot et le système de vision est établie, un journal sera enregistré dans l’onglet Console du panneau Journal de Mech-Vision.
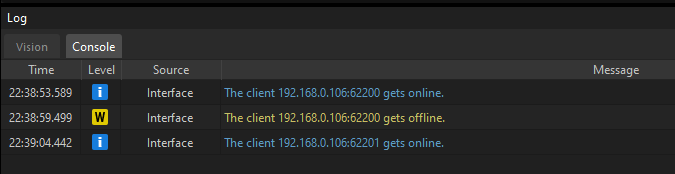
Vous avez maintenant chargé le programme d’Interface standard du robot et les fichiers de configuration dans le système du robot afin d’établir la communication via l’Interface standard entre le système de vision et le robot.