Configuration matérielle du système de vision
Dans ce tutoriel, vous apprendrez à mettre en place le système de vision Mech-Mind.
Pour mettre en place le système de vision Mech-Mind, suivez la procédure : Vérifier le contenu du colis → Installer le matériel → Connecter le réseau → Mettre à niveau le logiciel (optionnel) → Confirmer que le système de vision peut capturer des images normalement.
Vérifier le contenu du colis
-
Assurez-vous que le colis est intact à sa réception.
-
Comparez le contenu avec la « liste de colisage » incluse dans le colis afin de vous assurer qu’aucun appareil ni accessoire ne manque ou n’est endommagé.
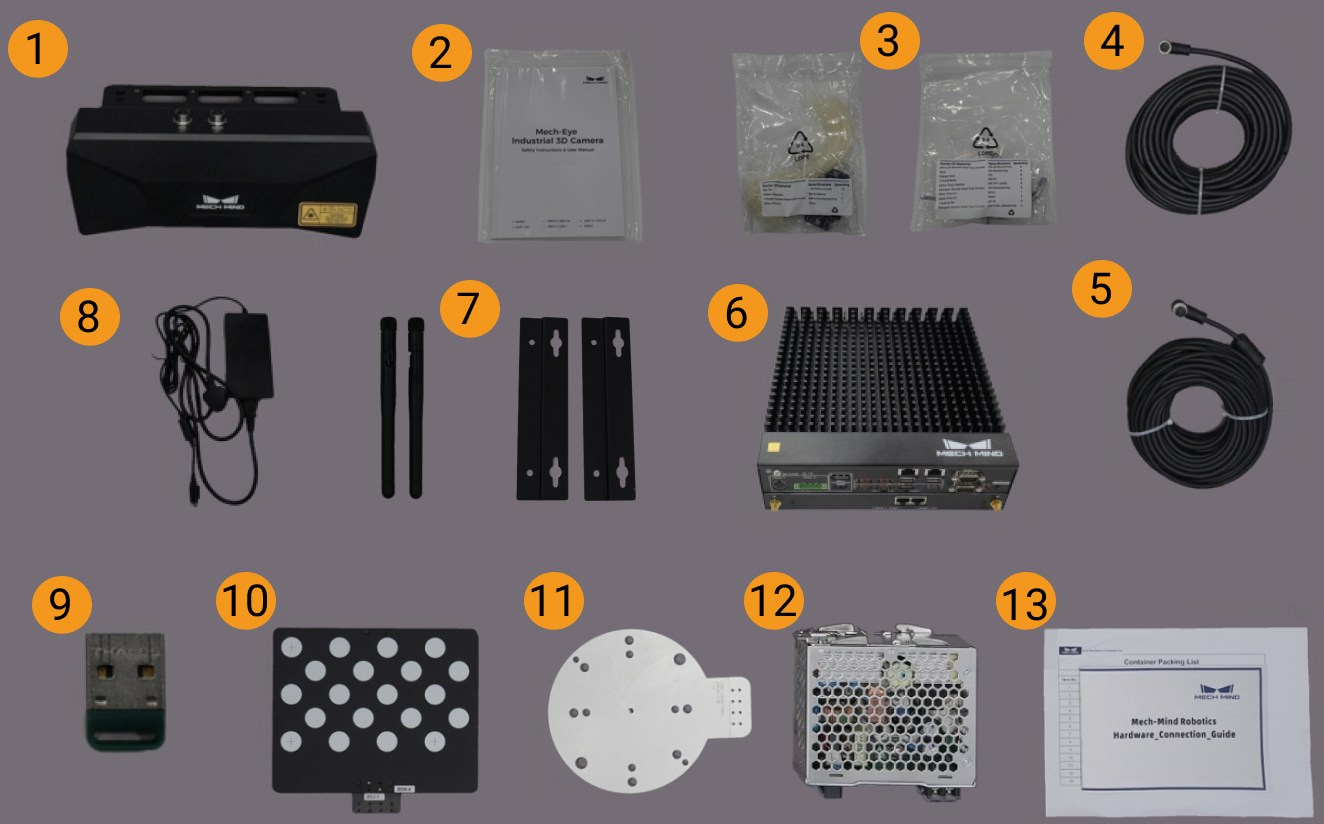
La figure suivante montre les appareils et accessoires inclus dans une expédition du système de vision. Le tableau ci-dessous est fourni uniquement à titre de référence. Veuillez vous fier à la « liste de colisage » présente dans le colis.
| No. | Catégorie | Nom | Fonction |
|---|---|---|---|
1 |
Caméra et accessoires |
Mech-Eye Industrial 3D Camera |
Capture des images |
2 |
Manuel d’utilisation et caractéristiques techniques de la caméra |
Manuel d’utilisation et caractéristiques techniques de la caméra 3D industrielle Mech-Eye |
|
3 |
Boîte d’accessoires de la caméra |
Permet de monter la caméra |
|
4 |
Câble d’alimentation CC de la caméra |
Relie la caméra à l’alimentation sur rail DIN ; des câbles d’alimentation de longueurs différentes peuvent être choisis selon les besoins |
|
5 |
Câble Ethernet de la caméra |
Relie la caméra à l’IPC ; des câbles Ethernet de longueurs différentes peuvent être choisis selon les besoins |
|
6 |
IPC et accessoires |
Mech-Mind IPC STD |
Fournit l’environnement d’exécution pour les logiciels de Mech-Mind |
7 |
Accessoires IPC |
Accessoires IPC tels que supports de montage et antennes Wi-Fi externes |
|
8 |
Câble d’alimentation et adaptateur pour IPC |
Alimente l’IPC |
|
9 |
Accessoires de projet |
Dispositif de licence logicielle (USB), également appelé dongle de licence |
Autorise le logiciel |
10 |
Plaque de calibration |
Calibre la caméra |
|
11 |
Adaptateur de bride |
Relie la plaque de calibration à la bride du robot |
|
12 |
Alimentation sur rail DIN (optionnelle) |
Alimente la caméra 3D industrielle Mech-Eye |
|
13 |
Liste de colisage |
Répertorie tous les appareils et accessoires du colis |
|
|
Contactez Mech-Mind si des éléments manquent ou sont endommagés. |
Préparer d’autres matériels
Dans ce tutoriel, outre les éléments présents dans le colis, vous devez encore préparer vous-même les matériels indiqués dans le tableau suivant.
| Élément | Fonction |
|---|---|
Moniteur |
Fournit l’affichage pour l’IPC |
Câble HDMI |
Relie le moniteur à l’IPC |
Câble Ethernet RJ45 |
Relie l’IPC au contrôleur du robot |
| Dans ce tutoriel, l’IPC et le contrôleur du robot sont directement connectés via un câble Ethernet RJ45‑vers‑RJ45, et l’IPC et la caméra sont directement connectés via le câble Ethernet de la caméra. Vous pouvez également utiliser un routeur pour relier l’IPC et le contrôleur du robot, ainsi que l’IPC et la caméra, ce qui n’est pas traité dans ce sujet. |
Installer le matériel
Fixer la caméra
|
Dans ce tutoriel, la caméra est fixée sur le cadre de montage de la caméra (c’est le mode de montage Eye-to-Hand (ETH)). De plus, la caméra peut également être montée à l’extrémité du robot (c’est le mode de montage Eye-in-Hand (EIH)). |
-
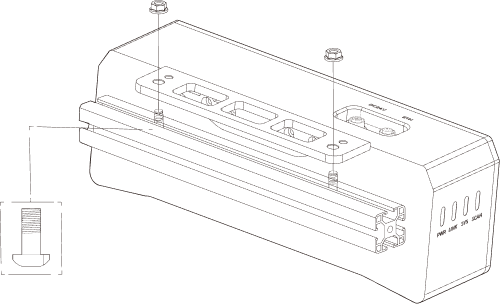
Sortez les boulons de montage de la caméra et la clé de la boîte d’accessoires de la caméra.
-
Serrez les deux boulons avec la clé, comme illustré ci-dessous.
-
Veuillez retirer le film de protection de l’objectif après avoir fixé la caméra.
-
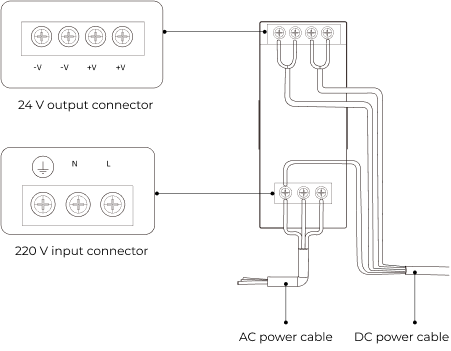
Alimentez la caméra via l’alimentation sur rail DIN.
-
Connectez le câble d’alimentation CC :
-
Connectez le fil +V aux bornes +V des sorties 24 V ;
-
Connectez le fil -V aux bornes -V des sorties 24 V ;
-
Connectez le fil PE au connecteur d’entrée 220 V
 .
.
-
-
-
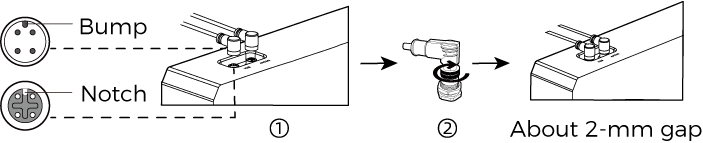
Installez le câble Ethernet de la caméra.
Alignez le bossage du connecteur M12 avec l’encoche du port ETH, puis serrez l’écrou après avoir branché le câble.
Installer l’IPC
|
L’IPC est généralement monté dans l’armoire de commande. L’environnement d’installation de l’IPC doit assurer une bonne dissipation thermique, une ventilation adéquate et une protection contre la poussière. Il doit être installé à un endroit où les câbles Ethernet et HDMI, ainsi que les ports USB, peuvent être facilement installés et maintenus. |
Pour installer l’IPC, suivez ces étapes :
-
Préparez à l’avance la clé, les boulons, les écrous et les rondelles qui ne sont pas inclus dans le colis.
-
Si le contrôleur du robot comporte des trous de montage pour l’IPC, fixez l’IPC dans le contrôleur : placez le boulon, la rondelle et l’écrou successivement, puis serrez les deux boulons avec une clé, comme illustré ci‑dessous.

Si l’emplacement du contrôleur du robot est déjà fixé, passez cette étape et placez simplement l’IPC à l’intérieur du contrôleur.
-
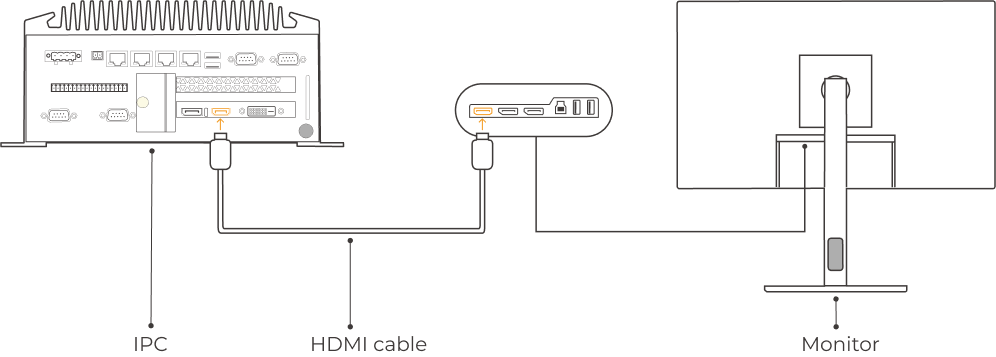
Reliez l’IPC et le moniteur avec le câble HDMI.
Branchez une extrémité du câble HDMI sur le port HDMI du moniteur, et l’autre extrémité sur le port HDMI de l’IPC, comme illustré ci‑dessous.
-
Reliez l’IPC à l’unité d’alimentation à l’aide de l’adaptateur secteur.
Branchez le câble d’alimentation de l’adaptateur sur le connecteur d’alimentation de l’IPC. Reliez l’autre extrémité de l’adaptateur à l’alimentation.
-
Insérez le dongle de licence.
Branchez le dongle de licence sur un port USB de l’IPC.
-
Une fois l’IPC raccordé à l’alimentation, mettez l’IPC sous tension.
-
Si l’IPC démarre normalement, le témoin d’alimentation doit rester allumé fixe.
-
Si l’IPC ne peut pas démarrer, contactez le support technique de Mech-Mind.
-
Connecter le réseau
Dans cette section, vous apprendrez à connecter le réseau entre l’IPC et la caméra, et entre l’IPC et le robot.
Dans les sections suivantes, les adresses IP ci‑dessous seront utilisées pour les réglages réseau. Veuillez ajuster les paramètres réseau en fonction de votre environnement réel.
| Appareil | Adresse IP | |
|---|---|---|
IPC |
Port Ethernet relié à la caméra |
192.168.100.10 |
Port Ethernet relié au contrôleur du robot |
192.168.200.10 |
|
Caméra |
192.168.100.20 |
|
Robot |
192.168.200.20 (déjà configuré sur le robot) |
|
Connecter l’IPC et la caméra, et l’IPC et le contrôleur du robot
-
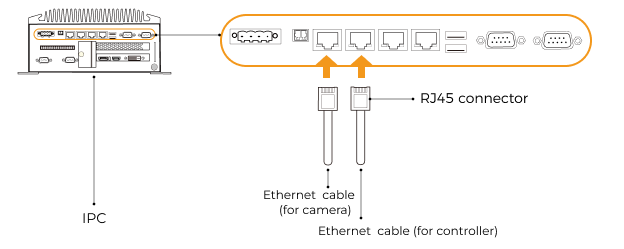
Branchez l’autre extrémité du câble Ethernet connecté à la caméra sur un port Ethernet de l’IPC.
-
Utilisez un câble Ethernet RJ45‑vers‑RJ45 pour brancher une extrémité sur le port Ethernet du contrôleur du robot et l’autre extrémité sur un port Ethernet de l’IPC.
Configurer les adresses IP sur l’IPC
-
Sélectionnez sur l’IPC. La page Connexions réseau s’affiche.
-
Cliquez avec le bouton droit sur le port Ethernet relié à la caméra, puis sélectionnez Renommer pour renommer le port Ethernet, par exemple “To_camera”.
-
Cliquez avec le bouton droit sur le port Ethernet relié à la caméra, puis sélectionnez Propriétés pour accéder à la page Propriétés Ethernet.
-
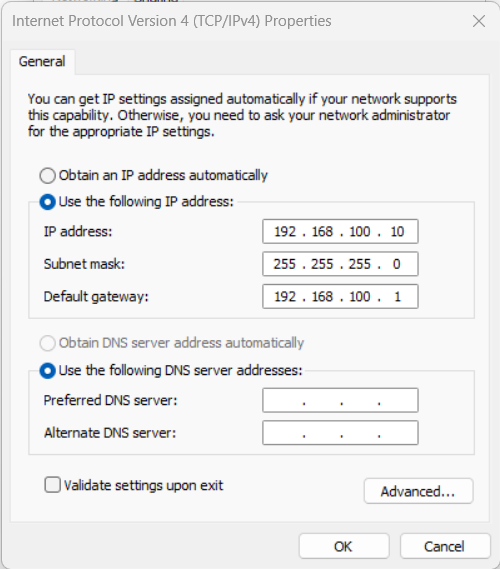
Cochez la case Internet Protocol Version 4 (TCP/IPv4), puis cliquez sur le bouton Propriétés pour accéder à la page Propriétés de Internet Protocol Version 4 (TCP/IPv4).
-
Sélectionnez le bouton radio Utiliser l’adresse IP suivante, définissez Adresse IP sur “192.168.100.10”, Masque de sous-réseau sur “255.255.255.0”, et Passerelle par défaut sur “192.168.100.1”, puis cliquez sur le bouton OK.
-
Répétez les étapes 2 à 5 pour renommer le port Ethernet relié au contrôleur du robot (par exemple “To_robot”), et définir l’adresse IP pour ce port Ethernet. Par exemple, l’adresse IP de ce port Ethernet est “192.168.200.10”.
L’adresse IP du robot et celle du port Ethernet de l’IPC relié au contrôleur du robot doivent se trouver sur le même sous-réseau.
Configurer l’adresse IP de la caméra
-
Double‑cliquez sur
 sur le bureau de l’IPC pour ouvrir et exécuter Mech-Eye Viewer.
sur le bureau de l’IPC pour ouvrir et exécuter Mech-Eye Viewer. -
Sélectionnez la caméra dans la liste des caméras, puis survolez la caméra avec le curseur. Cliquez sur
 pour ouvrir la boîte de dialogue IP Configuration.
pour ouvrir la boîte de dialogue IP Configuration.
Si la caméra ne peut pas être trouvée ou connectée, veuillez consulter Dépannage de la caméra.
-
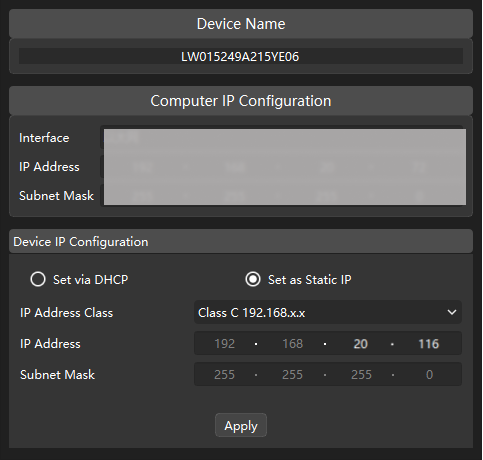
Dans la zone IP Configuration, sélectionnez le bouton radio Set as Static IP, puis réglez IP Address Class, IP Address et Subnet Mask en fonction de l’environnement réseau réel. Par exemple, dans la figure suivante, les paramètres ci‑dessus sont « Type C 192.168.x.x », « 192.168.20.116 » et « 255.255.255.0 ». Cliquez ensuite sur le bouton Appliquer.
|
L’adresse IP de la caméra et celle du port Ethernet de l’IPC relié à la caméra doivent se trouver sur le même sous-réseau. |
Tester la connectivité réseau
-
Appuyez sur Win + R pour ouvrir la boîte de dialogue Exécuter.
-
Tapez
cmddans la boîte de dialogue Exécuter, puis cliquez sur OK. -
Tapez ping XXX.XXX.XX.XX dans la fenêtre d’invite de commandes et appuyez sur Entrée pour exécuter la commande.
Remplacez XXX.XXX.XX.XX par l’adresse IP réelle de la caméra/du robot.
Si la connectivité réseau est normale, vous devriez recevoir la réponse suivante :
Envoi d'une requête ping vers XXX.XXX.XX.XX avec 32 octets de données:
Réponse de XXX.XXX.XX.XX: octets=32 temps<1ms TTL=128
Réponse de XXX.XXX.XX.XX: octets=32 temps<1ms TTL=128
Réponse de XXX.XXX.XX.XX: octets=32 temps<1ms TTL=128Mettre à niveau le logiciel (optionnel)
L’IPC acheté auprès de Mech-Mind possède déjà la dernière version des logiciels Mech-Mind installée.
Veuillez vérifier si tous les logiciels sur l’IPC sont à la dernière version. Si c’est le cas, passez cette section ; sinon, suivez les sections ci‑dessous pour mettre les logiciels à jour vers les dernières versions.
Confirmer la qualité des images capturées
Confirmez que le système de vision peut capturer des images normalement et que la qualité d’image répond aux exigences après avoir vérifié la connectivité réseau entre l’IPC et la caméra, et entre l’IPC et le robot, et après avoir confirmé que le logiciel est à la dernière version.
-
Placez les objets cibles au centre du plan de travail dans le champ de vision de la caméra.
-
Ouvrez et démarrez Mech-Eye Viewer en double‑cliquant sur
sur le bureau de l’IPC. -
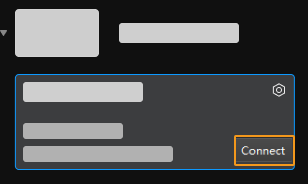
Sélectionnez la caméra dans la liste des caméras et cliquez sur Connecter.
-
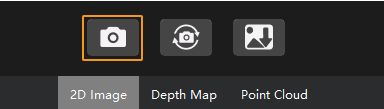
Après avoir sélectionné le modèle de groupe de paramètres “Threaded rod,” cliquez sur le bouton « Capturer une fois ».
-
Assurez‑vous que les objets cibles situés en bordure et sur la couche supérieure se trouvent tous dans le champ de vision de la caméra.
-
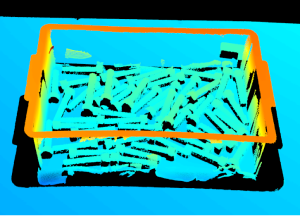
Assurez‑vous que les images capturées répondent aux critères suivants. Les images conformes sont les suivantes :
-
Image 2D : l’image 2D capturée n’est ni significativement surexposée (trop blanche pour reconnaître les objets) ni sous‑exposée (trop sombre pour discerner les détails des objets).
-
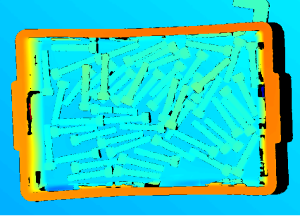
Carte de profondeur et nuage de points : toutes les parties pertinentes de l’objet sont reconnaissables.
Image 2D Carte de profondeur Nuage de points 
-
|
Si les images capturées ne répondent pas aux critères requis, utilisez Mech-Eye Viewer pour ajuster les paramètres de la caméra. |
À présent, vous savez comment construire le système de vision.
Capturer des images et entraîner des modèles d’apprentissage profond
Lorsque la qualité du nuage de points de l’objet cible sur site est médiocre ou que le nuage de points de la scène est sujet à des reconnaissances erronées, l’apprentissage profond sera utilisé pour aider à reconnaître les poses de l’objet cible.
| Ce cas fournit un modèle d’apprentissage profond entraîné à l’avance. Vous pouvez le télécharger en cliquant ici. Si vous devez entraîner votre propre modèle d’apprentissage profond, reportez-vous à cette section pour acquérir des images et entraîner un modèle d’apprentissage profond. |
-
Capturez des images selon les règles suivantes。
-
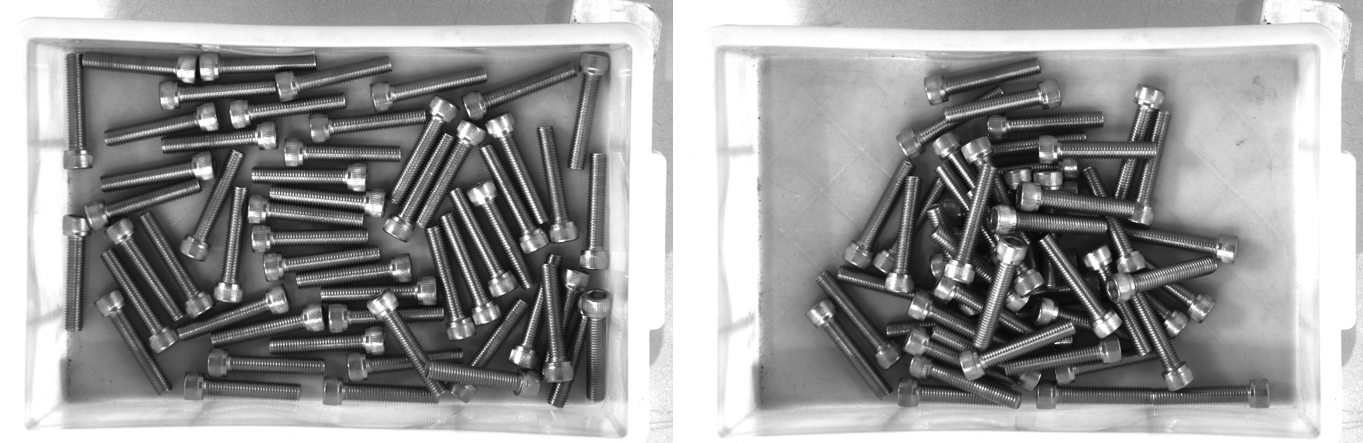
Capturez des images dans des conditions normales, où les objets sont empilés de manière dispersée et de manière groupée。
Le nombre d’objets cibles est réduit progressivement à partir d’un grand nombre. À chaque fois, retirez un ou plusieurs objets cibles, selon le cas, puis réorganisez l’agencement et capturez de nouveau, jusqu’à ce que tous les objets cibles aient été retirés。
-
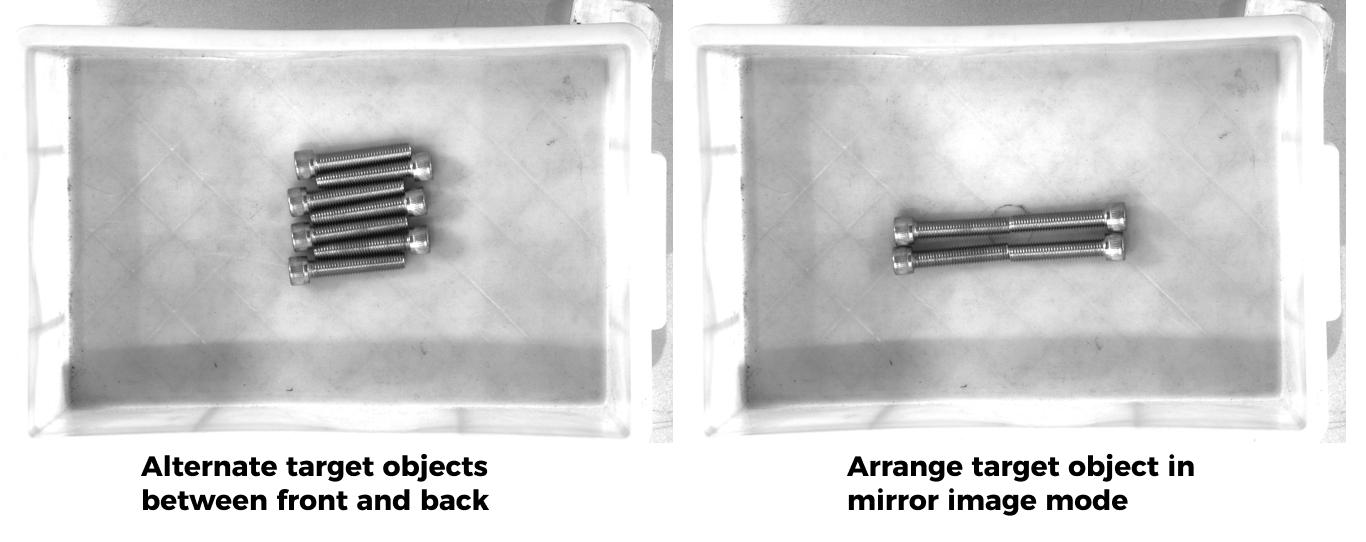
Capturez des images dans des conditions particulières, par exemple lorsque plusieurs objets sont assemblés ou empilés。
Si plusieurs objets cibles sont assemblés ou se chevauchent de manière indiscernable, vous devez augmenter le nombre d’images capturées (environ dix)。
-
-
Reportez-vous à Former des modèles de haute qualité pour entraîner un modèle de segmentation d’instances de haute qualité。