Sujets : Problèmes courants avec « 3D Matching »
Cette section présente la façon de résoudre les problèmes d’appariement causés par des normales incorrectes du modèle de nuage de points et par l’incohérence du repère de référence du nuage de points à apparier.
Problèmes d’appariement causés par des normales incorrectes dans les modèles de nuage de points
À partir de Mech-Vision 2.0.0, le processus d’appariement impose des exigences strictes sur les normales des modèles de nuage de points. Lorsque les normales d’un modèle de nuage de points sont incorrectes, cela entraîne directement un échec de l’appariement. Les sections suivantes présentent deux anomalies et leurs solutions correspondantes.
Des normales incorrectes se produisent lors de l’utilisation d’un modèle STL pour générer un modèle de nuage de points
-
Symptôme
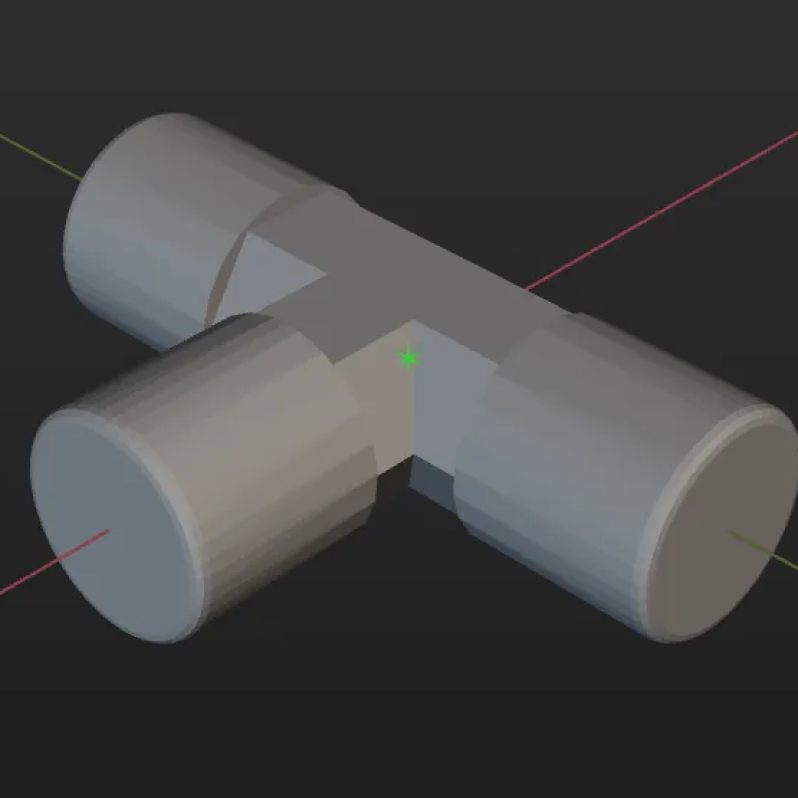
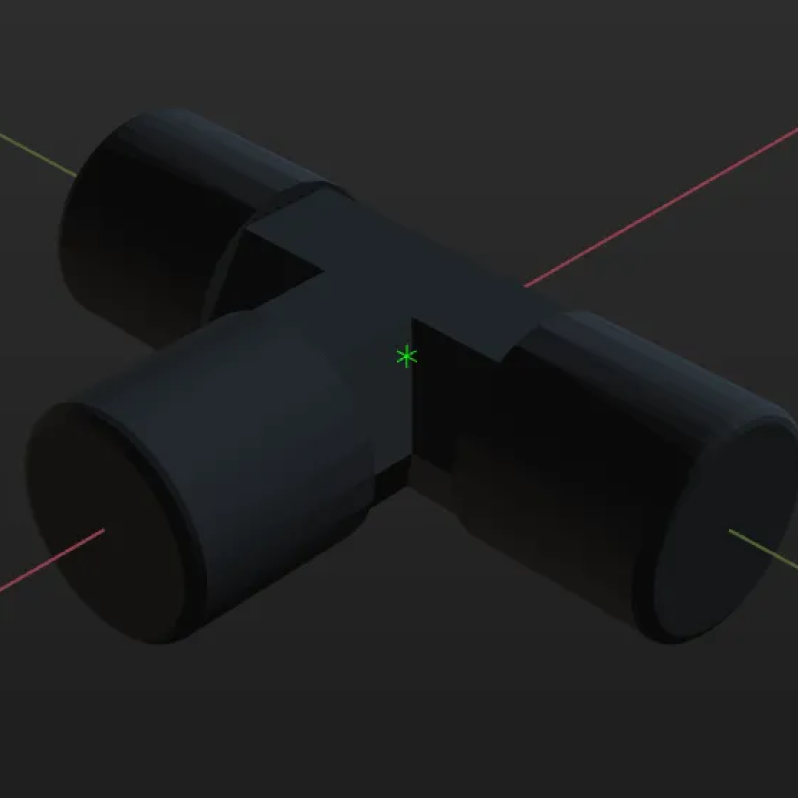
Après l’importation du modèle STL dans l’éditeur d’objet cible, certaines zones du modèle étaient affichées en noir, ce qui indique généralement des normales incorrectes. Normalement, le modèle devrait être rendu de manière uniforme
Le tableau ci-dessous montre des exemples de modèles avec des normales correctes et incorrectes.
Normales correctes du modèle de nuage de points Normales incorrectes du modèle de nuage de points 

-
Solution
Si les normales du modèle STL sont incorrectes, vous pouvez utiliser l’outil « Correction des normales du modèle STL » pour réparer le modèle STL.
Pour les instructions de téléchargement et d’utilisation de l’outil « Correction des normales du modèle STL », reportez-vous à Corriger les normales du modèle STL.
Des normales ou tangentes incorrectes apparaissent après l’utilisation d’Étapes pour générer des modèles de nuage de points
-
Symptôme
Le modèle de nuage de points des arêtes contient des normales ou des tangentes anormales après traitement par des Étapes telles que « Regroupement de nuages de points », « Obtenir les nuages de la couche la plus élevée », etc.
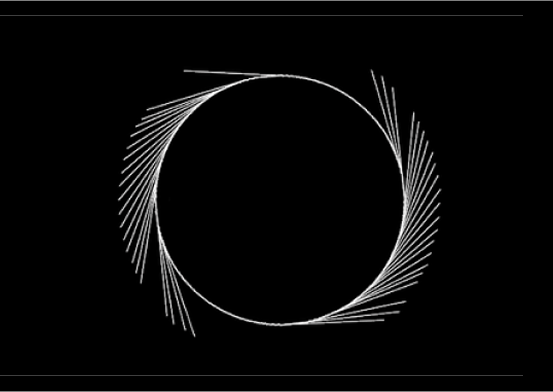
Normales correctes du modèle de nuage de points des arêtes Normales incorrectes du modèle de nuage de points des arêtes 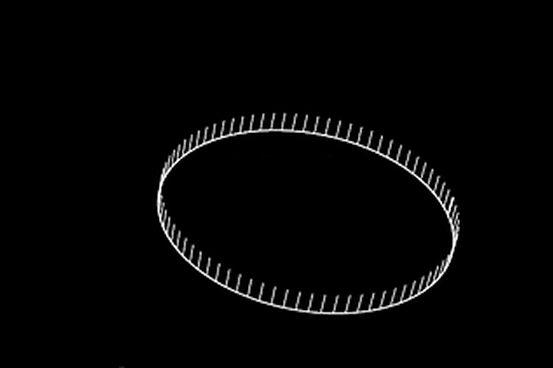
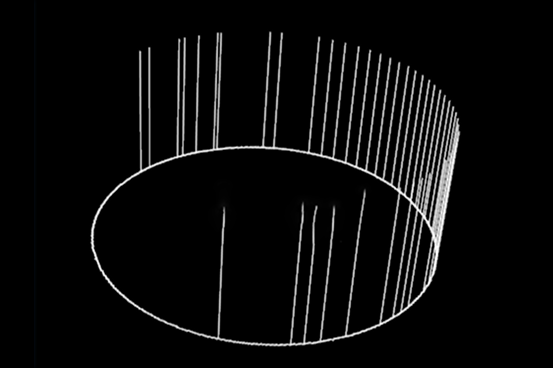
Tangentes correctes du modèle de nuage de points des arêtes Tangentes incorrectes du modèle de nuage de points des arêtes 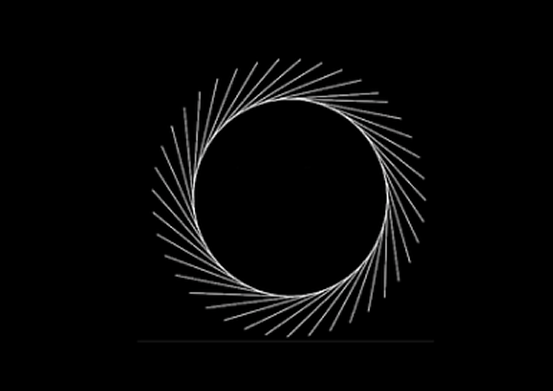
-
Solution
Il est recommandé d’utiliser directement pour l’appariement le modèle de nuage de points généré par l’Étape.
Problèmes d’appariement causés par un repère de référence incohérent entre le modèle de nuage de points et le nuage de points à apparier
Lors de l’utilisation de l’Étape « 3D Matching », il est recommandé d’utiliser le nuage de points dans le repère de la caméra comme modèle de nuage de points, et de veiller à ce que le nuage de points à apparier fourni à l’Étape « 3D Matching » corresponde au repère de référence du modèle de nuage de points.
Si le repère de référence du modèle de nuage de points n’est pas aligné sur celui du nuage de points à apparier, le processus d’appariement échouera ou produira des résultats incorrects. Les problèmes spécifiques sont décrits ci-dessous.
La fonction « Supprimer les poses chevauchées » filtre des correspondances correctes
Une fois la fonction « Supprimer les poses chevauchées » activée, lorsque le taux de chevauchement entre le nuage de points de l’objet cible dans le repère de la caméra et d’autres nuages de points situés au-dessus dépasse le seuil, la pose de l’objet cible chevauché sera supprimée.
Cependant, dans certains cas, le résultat d’appariement correct peut être filtré. Le symptôme spécifique est décrit comme suit.
-
Symptôme
Après avoir activé la fonction « Supprimer les poses chevauchées » dans l’Étape « 3D Matching », les résultats d’appariement corrects ont été filtrés.
-
Cause possible
Lorsque le nuage de points de l’objet cible est dans le repère de la caméra et que le nuage de points à apparier est dans le repère du robot, et qu’il existe plusieurs résultats d’appariement fins, les résultats d’appariement corrects sont filtrés.
-
Solution
Pendant l’appariement, veillez à ce que le nuage de points fourni à l’Étape « 3D Matching » partage le même repère de référence que le modèle de nuage de points.
Résultat d’appariement erroné ou absent après ajustement du « Seuil d’angle »
Si le modèle de nuage de points généré par le modèle STL est utilisé pour l’appariement, vous pouvez supprimer les parties invisibles du modèle de nuage de points en ajustant le paramètre dans l’Étape « 3D Matching » afin d’améliorer la vitesse et la précision de l’appariement. Ce paramètre se trouve au niveau de réglage Expert.
Cependant, l’ajustement du « Seuil d’angle » peut également entraîner des résultats d’appariement incorrects ou l’absence de résultats. Le symptôme spécifique est décrit ci-dessous.
-
Symptôme
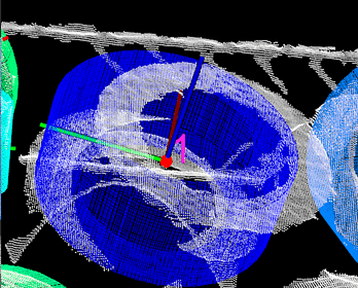
Lorsque le Seuil d’angle était défini à 180°, l’appariement a réussi. Après avoir ajusté le Seuil d’angle, les résultats d’appariement différaient fortement de ceux avant l’ajustement, et l’appariement était incorrect.
Seuil d’angle: 180° Seuil d’angle: 135° 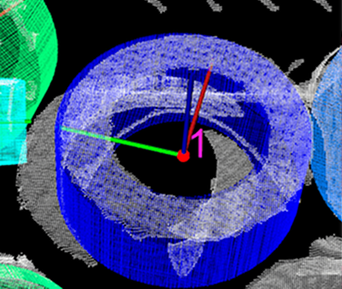
-
Cause possible
Le repère de référence du modèle de nuage de points et celui de l’objet cible étaient incohérents.
-
Solution
Pendant l’appariement, veillez à ce que le nuage de points fourni à l’Étape « 3D Matching » partage le même repère de référence que le modèle de nuage de points.
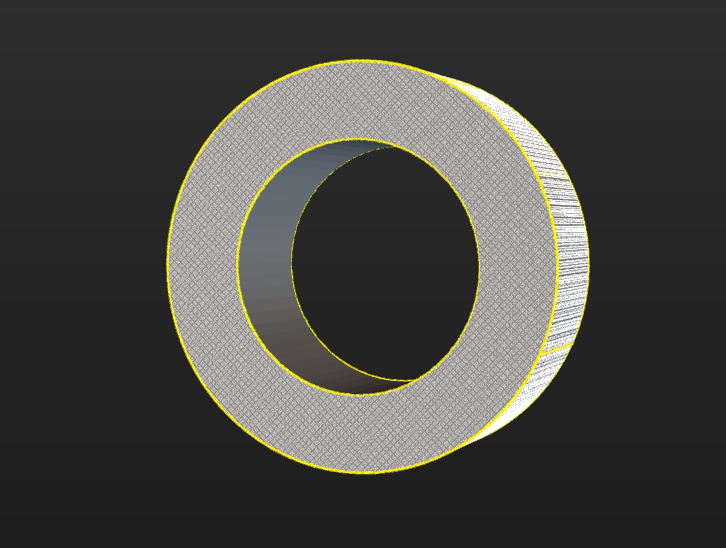
Problèmes d’appariement causés par une perte de nuage de points sur la paroi intérieure d’un modèle STL de type anneau
-
Symptôme
Lors de l’utilisation de Mech-Vision 2.x pour générer un modèle de nuage de points basé sur le modèle STL de l’anneau, le modèle de nuage de points ne contenait pas le nuage de points de la paroi intérieure de l’anneau, ce qui a réduit la fiabilité du résultat d’appariement.
-
Solution
Ce problème n’existe pas dans Mech-Vision 1.8. Dans Mech-Vision 2.1.2, l’éditeur d’objet cible peut être utilisé pour sélectionner Générer à partir de toute la surface afin de créer un nuage de points pour les modèles STL.