Configuration de la communication du robot
Dans ce tutoriel, vous apprendrez à charger les fichiers du programme Interface Standard sur le robot Yaskawa, et à configurer la communication via l’Interface Standard entre le système de vision Mech-Mind et le robot.
|
Préparation avant le chargement
Vérifier la compatibilité du contrôleur et du logiciel
-
Confirmez que le robot est un robot YASKAWA à 6 axes. Dans ce guide, YASKAWA_GP8 est utilisé.
-
Vérifiez que le modèle du contrôleur robot et la version du système répondent aux exigences ci-dessous.
Modèle de contrôleur Version du système DX200
DN3.16.00A-00
YRC1000
YAS2.94.00-00
YRC1000micro
YBS2.31.00-00
Dans ce guide, le robot YRC1000 (YAS2.94.00-00) est utilisé. -
Vérifiez que l’option Ethernet a été activée pour le robot YASKAWA.
Cliquez ici pour les instructions
-
Maintenez enfoncée la touche MENU PRINCIPAL sur le boîtier d’enseignement, puis mettez le robot sous tension pour entrer en mode de maintenance.
Si le robot est déjà démarré, redémarrez-le en maintenant la touche MENU PRINCIPAL du boîtier d’enseignement enfoncée. 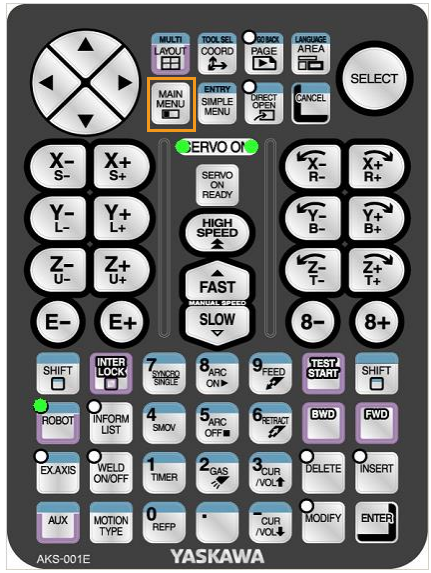
-
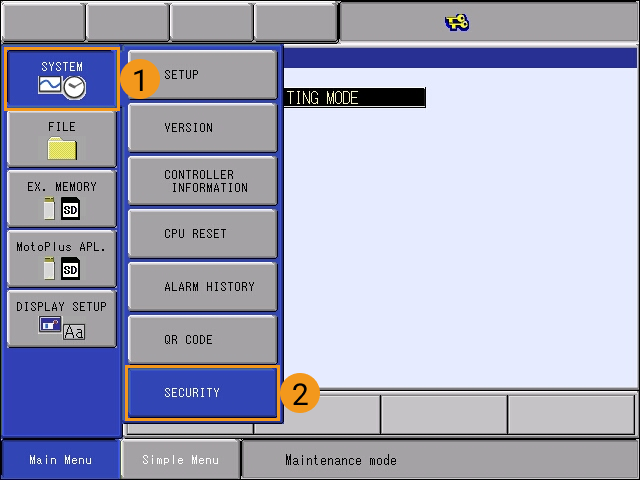
En mode de maintenance, sélectionnez .

-
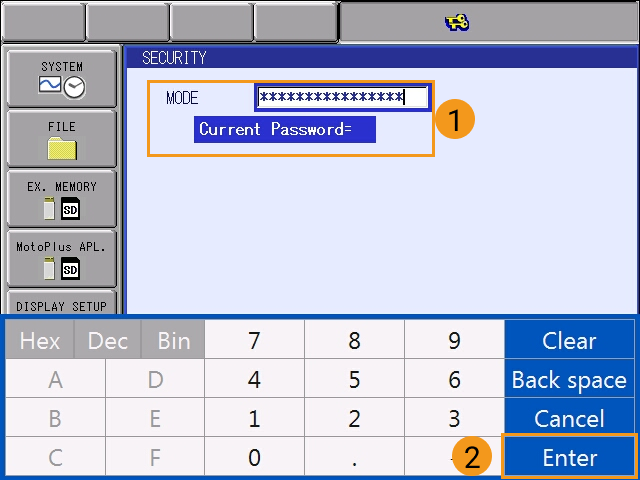
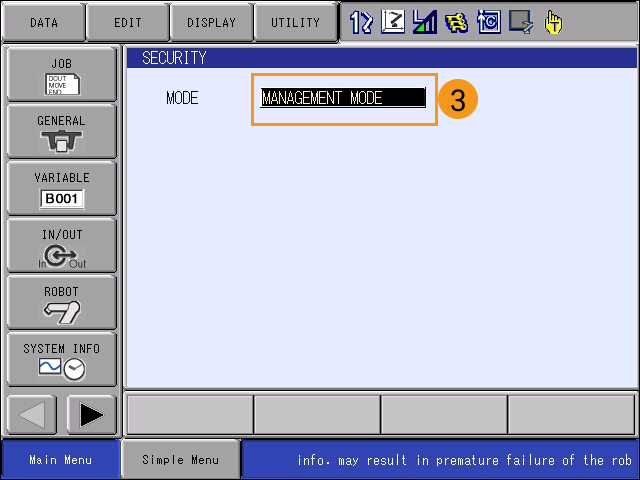
Saisissez le mot de passe (seize 9 par défaut), puis sélectionnez Entrer pour accéder au MODE DE GESTION.
-
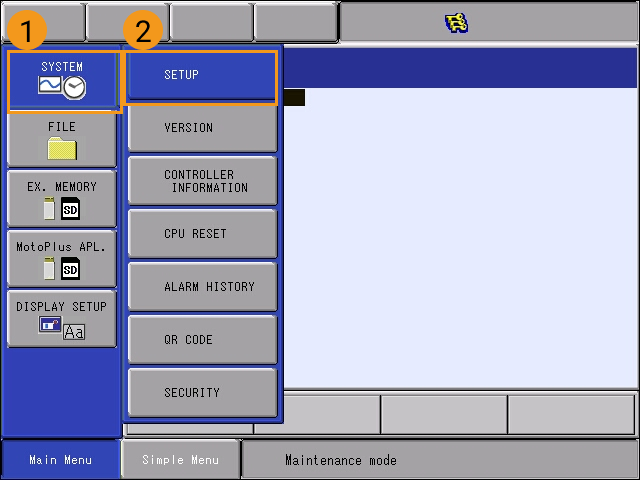
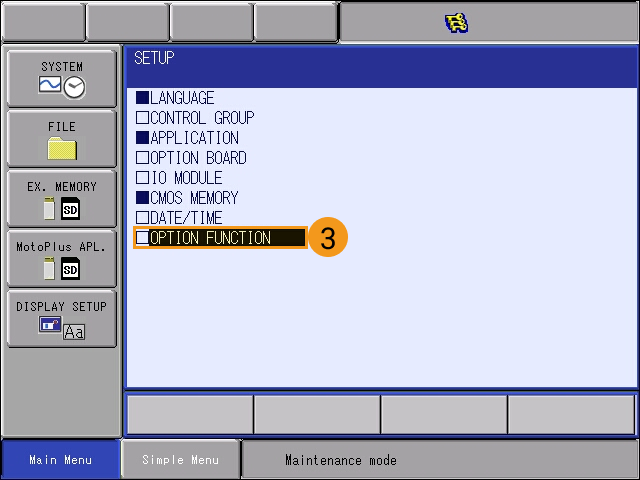
Dans le Menu principal, sélectionnez .
-
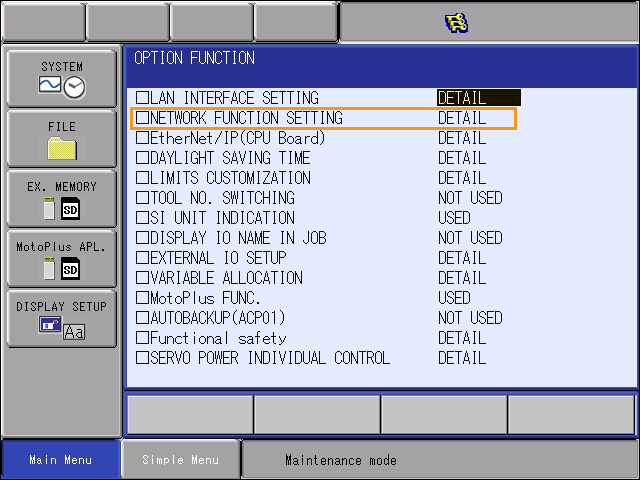
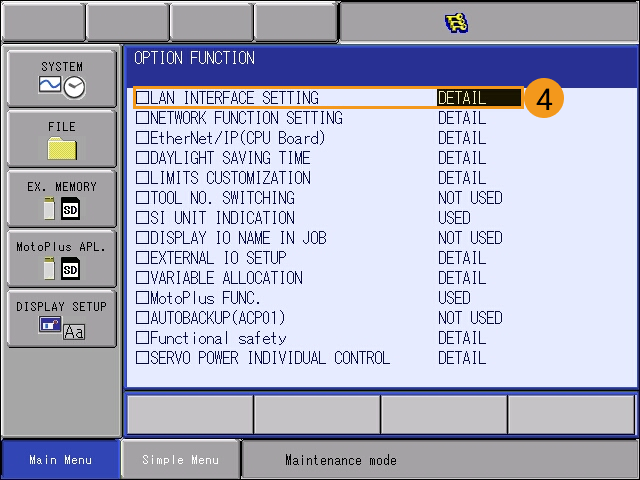
Dans l’interface FONCTION D’OPTION, sélectionnez DÉTAIL de RÉGLAGE DE LA FONCTION RÉSEAU, puis appuyez sur SÉLECTIONNER sur le boîtier d’enseignement pour accéder à l’interface RÉGLAGE DE LA FONCTION RÉSEAU.
-
Vérifiez que l’état de ETHERNET est affiché comme UTILISÉ.
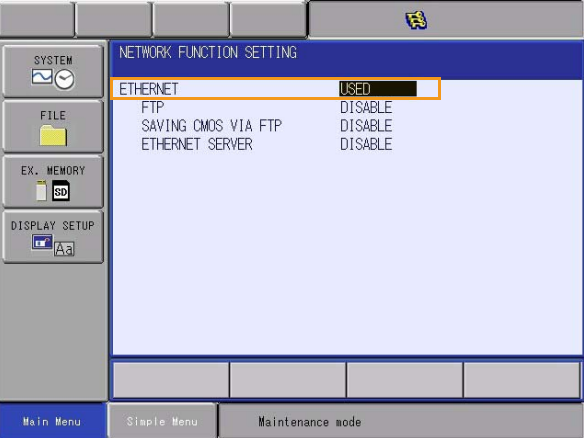
Si l’état est NON UTILISÉ, veuillez contacter le fabricant du robot pour obtenir de l’aide.
-
-
Vérifiez que l’option MotoPlus a été activée pour le robot YASKAWA.
Cliquez ici pour les instructions
-
En MODE DE GESTION du mode de maintenance, sélectionnez dans le Menu principal.
-
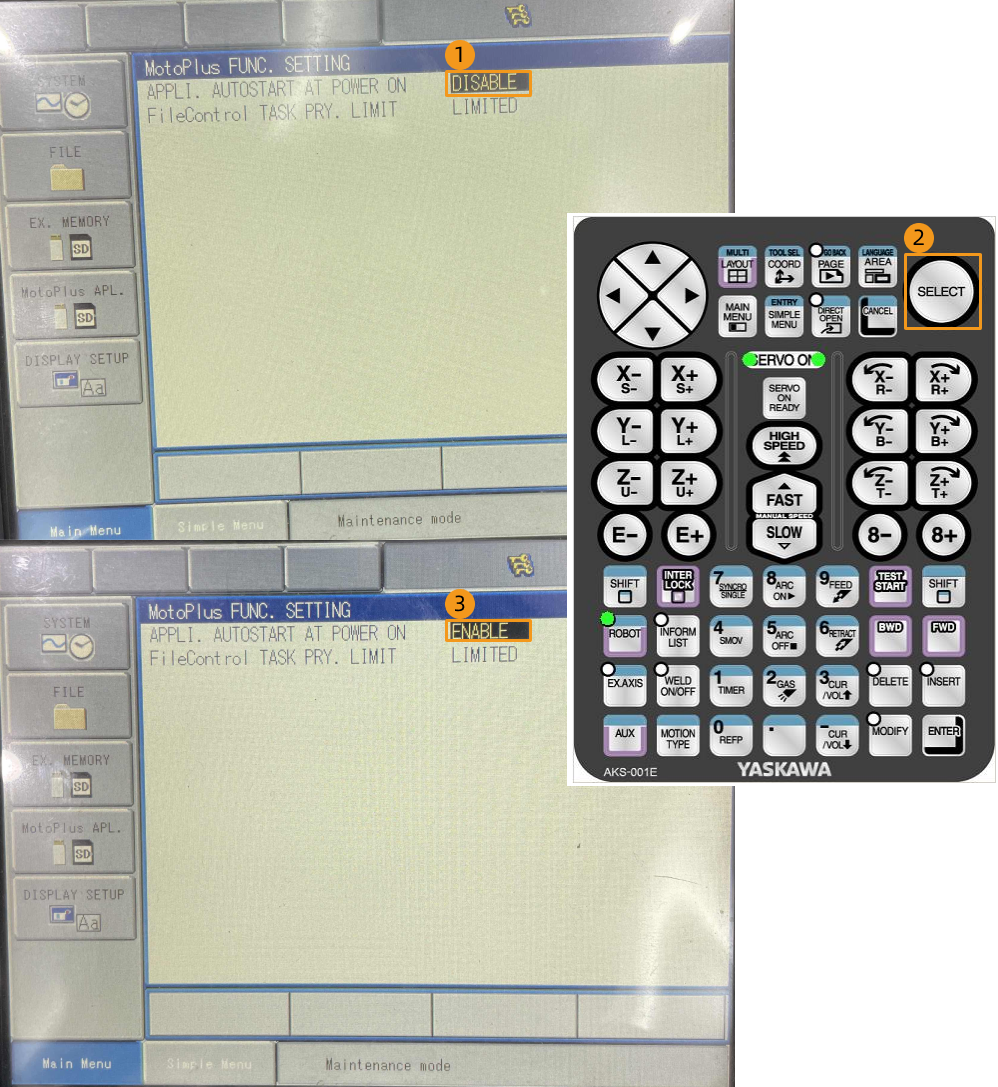
Sur l’interface RÉGLAGE DES FONCTIONS MotoPlus, vérifiez si l’état de DÉMARRAGE AUTOMATIQUE DE L’APPLI. À LA MISE SOUS TENSION est ACTIVÉ.
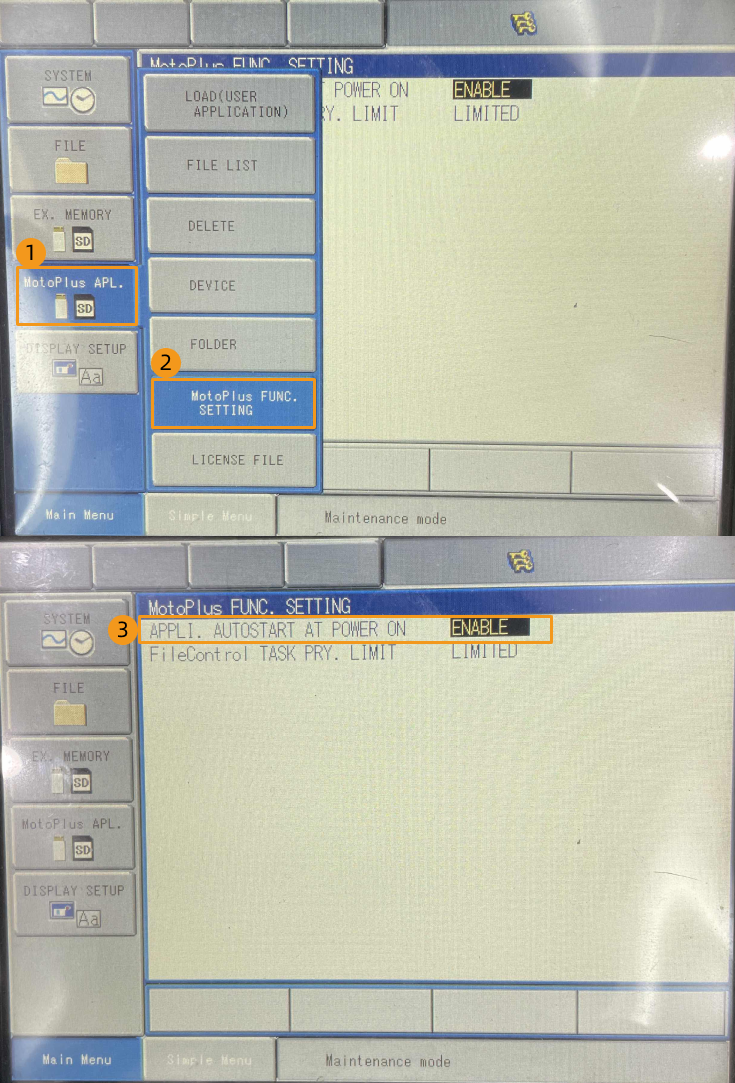
-
Si l’état est DÉSACTIVÉ, sélectionnez DÉSACTIVÉ, puis appuyez sur SÉLECTIONNER sur le boîtier d’enseignement pour passer l’état à ACTIVÉ.
-
|
Si les conditions ci-dessus ne peuvent pas être satisfaites, le système de vision ne peut pas communiquer avec le robot via l’Interface Standard. Veuillez contacter le fabricant du robot pour obtenir de l’aide. |
Configurer la connexion réseau
-
Si vous utilisez le contrôleur YRC1000, branchez le câble Ethernet de l’IPC sur le port LAN2 (CN106) de la carte CPU du contrôleur du robot.
-
Si vous utilisez le contrôleur DX200, branchez le câble Ethernet de l’IPC sur le port CN104 de la carte CPU du contrôleur du robot.
-
Pour le contrôleur YRC1000 :
-
Le port LAN1 sert uniquement à connecter le boîtier d’enseignement et ne peut pas être utilisé pour connecter le câble Ethernet de l’IPC.
-
Si le port LAN2 est occupé, utilisez plutôt LAN3 pour connecter le câble Ethernet de l’IPC.
-
-
-
Assurez-vous que l’adresse IP du robot YASKAWA et celle de l’IPC sont sur le même sous-réseau.
Cliquez ici pour les instructions
-
En MODE DE GESTION du mode de maintenance, sélectionnez dans le Menu principal. Dans l’interface FONCTION D’OPTION, sélectionnez RÉGLAGE DE L’INTERFACE LAN.
-
Vérifiez l’adresse IP du robot (c’est-à-dire l’adresse IP de LAN2).
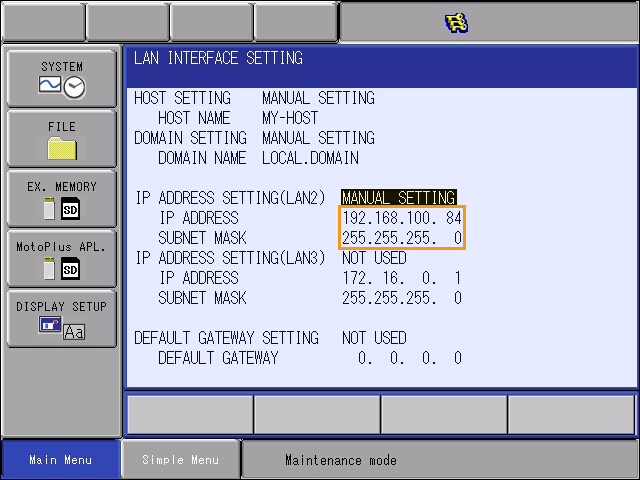
-
Assurez-vous que l’adresse IP du robot et celle de l’IPC sont sur le même sous-réseau. Si elles ne sont pas sur le même sous-réseau, veuillez vous référer à la section Définir les adresses IP sur l’IPC pour modifier l’adresse IP de l’IPC.
-
Créer un projet Mech-Vision et l’enregistrer
-
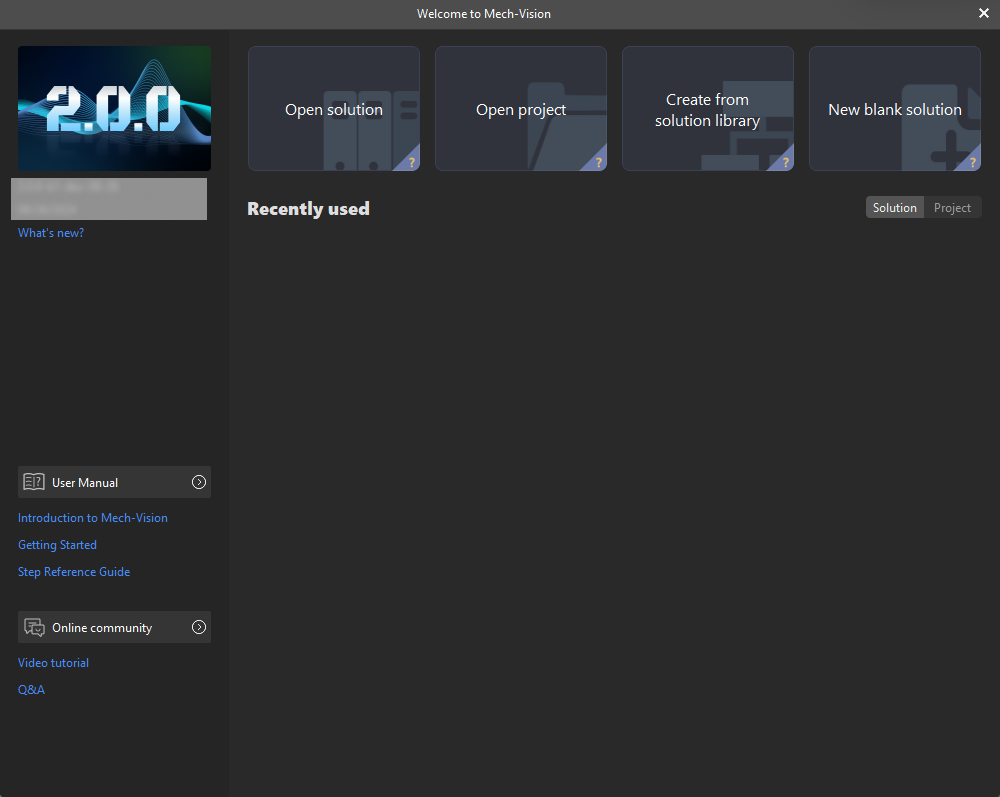
Ouvrez Mech-Vision. Si l’interface de bienvenue présentée ci-dessous s’affiche, cela indique que Mech-Vision a démarré avec succès.
-
Dans l’interface de bienvenue de Mech-Vision, cliquez sur Créer à partir de la bibliothèque de solutions pour ouvrir la Bibliothèque de solutions.

La Bibliothèque de solutions est une bibliothèque de ressources qui fournit des solutions ou des projets typiques (avec des données d’exemple) provenant de divers scénarios d’application. -
Dans l’onglet Modèle d’application de la Bibliothèque de solutions, sélectionnez la solution High-Precision Positioning and Assembly, comme illustré ci-dessous.
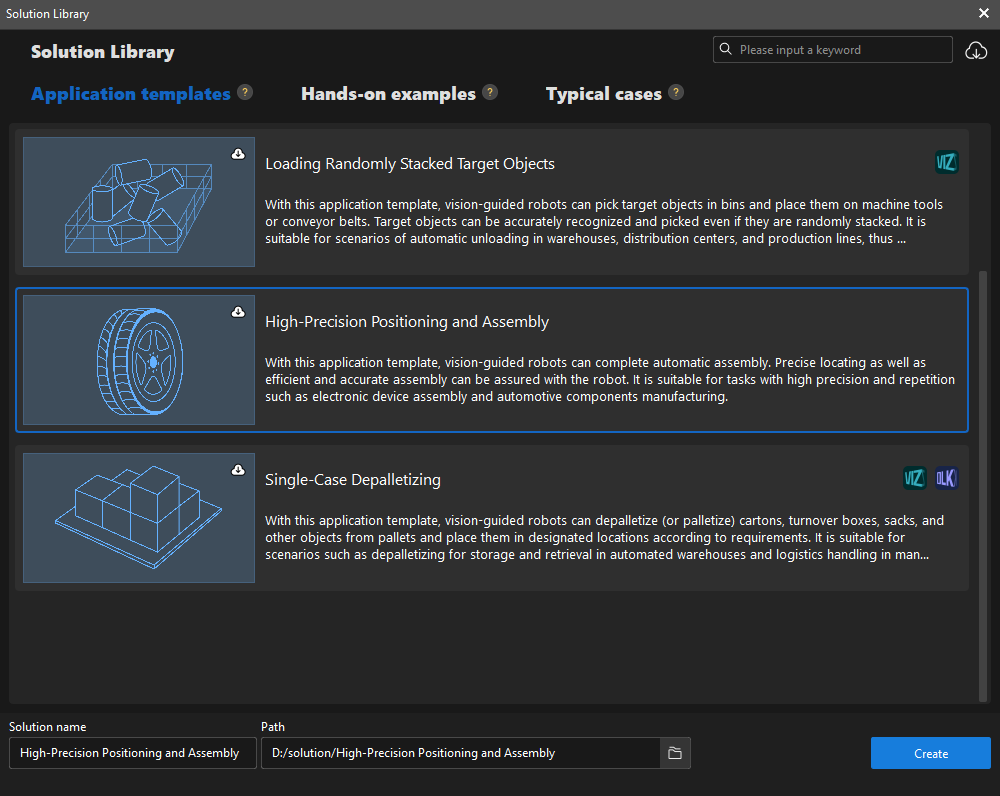
Si vous ne trouvez pas la solution High-Precision Positioning and Assembly dans la Bibliothèque de solutions, cliquez sur l’icône Télécharger dans l’angle supérieur droit.
-
Définissez le nom et le chemin de la solution, puis cliquez sur Créer.
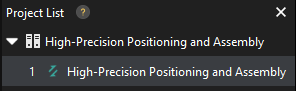
Après la création du projet, la solution et le projet créés s’affichent dans la liste des projets dans le coin supérieur gauche de l’interface principale de Mech-Vision.
-
Une solution est un ensemble de configurations et de données liées aux robots et à la communication avec les robots, au traitement de vision, à la planification de trajectoire, etc., nécessaires pour l’application de vision industrielle.
-
Un projet est un flux de travail de traitement de vision dans la solution. Normalement, une solution ne contient qu’un seul projet Mech-Vision, mais elle peut en contenir plusieurs dans des scénarios d’application complexes.
-
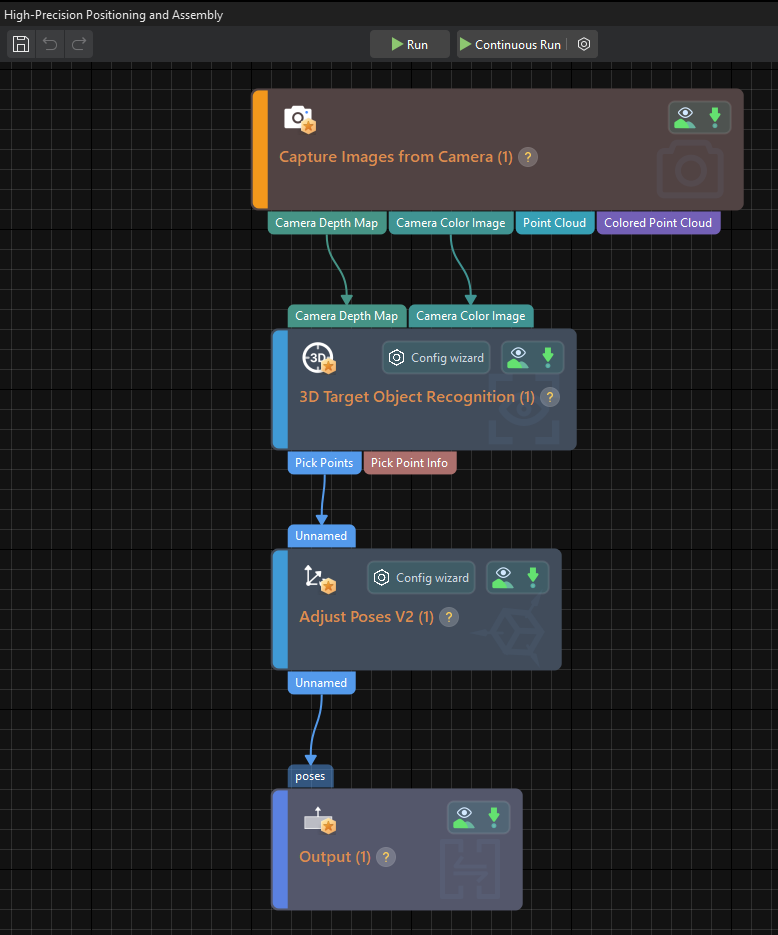
La solution High-Precision Positioning and Assembly ne contient qu’un seul projet “High-Precision Positioning and Assembly”.
Dans l’Espace de programmation graphique de l’interface principale, le flux de travail du projet “High-Precision Positioning and Assembly” est affiché.
-
-
Dans la liste des projets, cliquez avec le bouton droit sur la solution, puis sélectionnez Chargement automatique de la solution.
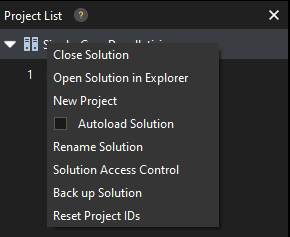
Une fois le chargement automatique défini pour cette solution, le nom du projet s’affiche en vert et l’ID du projet s’affiche à gauche du nom du projet.
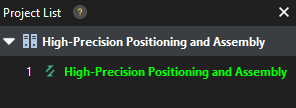
L’ID du projet sera utilisé par le programme de prise et de dépose du robot pour déclencher l’exécution du projet Mech-Vision. -
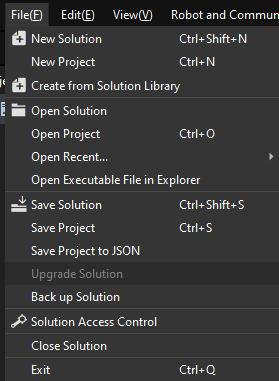
Dans la barre de menus, sélectionnez .
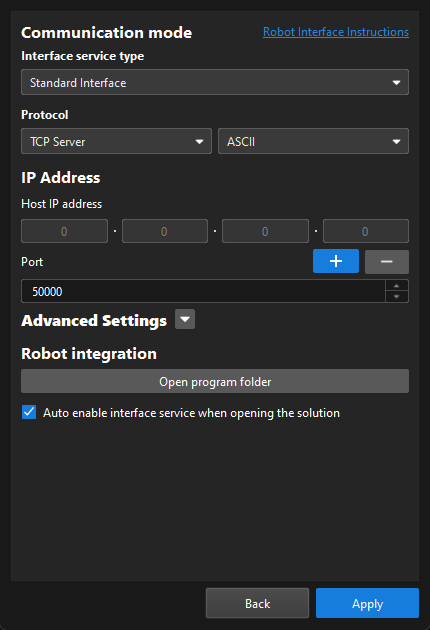
Configurer la communication du robot
Dans cet exemple, la configuration de communication du robot a été définie par défaut pour le robot YASKAWA (YASKAWA_GP8). L’option Configuration de la communication du robot dans la barre d’outils est activée.
Préparer les fichiers de programme
-
Sur l’IPC, accédez à
Communication Component/Robot_Interface/YASKAWAdans le répertoire d’installation de Mech-Vision & Mech-Viz. -
Si vous utilisez le contrôleur YRC1000, copiez le dossier JBI et le fichier mm_module_yrc1000.out dans le répertoire racine de la clé USB vide déjà formatée.
-
Veuillez vous assurer que votre clé USB est formatée à l’avance et que le système de fichiers de la clé est FAT32.
-
Si vous utilisez le contrôleur DX200, vous devez copier le fichier de programme backend mm_module_dx200.out à cette étape.
-
mm_module_yrc1000.out : le fichier de programme backend du robot (fichier d’application MotoPlus).
-
JBI : le dossier contenant les fichiers de programme frontend du robot (fichiers Job).
-
-
Branchez la clé USB sur le port USB du panneau arrière du boîtier d’enseignement.
Assurez-vous qu’aucun programme ne s’exécute dans MotoPlus
Avant de charger les fichiers de programme du robot, assurez-vous qu’aucun autre programme MotoPlus n’est en cours d’exécution.
-
S’il n’y a aucun programme en cours d’exécution, passez cette section.
-
S’il y a des programmes en cours d’exécution, supprimez ces programmes d’application.
Cliquez ici pour les instructions
-
En MODE DE GESTION du mode de maintenance, sélectionnez dans le Menu principal.
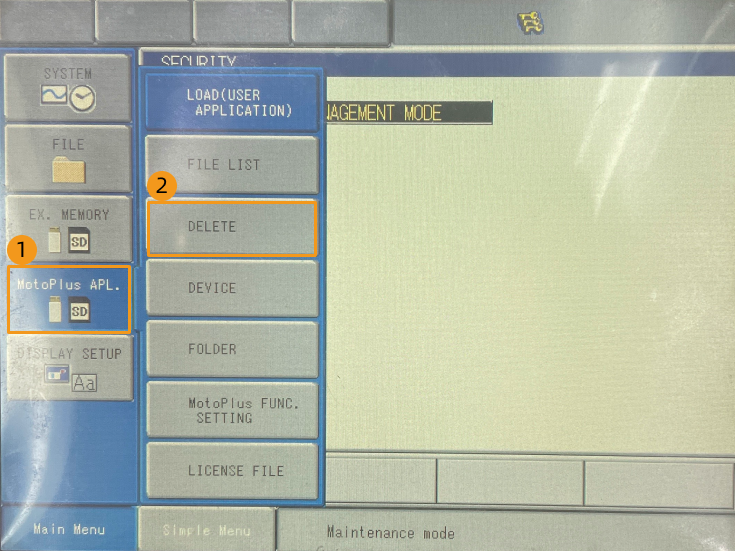
-
Sur l’interface MotoPlus APL. SUPPRIMER, sélectionnez le fichier de programme à supprimer, puis appuyez sur SÉLECTIONNER sur le boîtier d’enseignement pour sélectionner ce fichier.
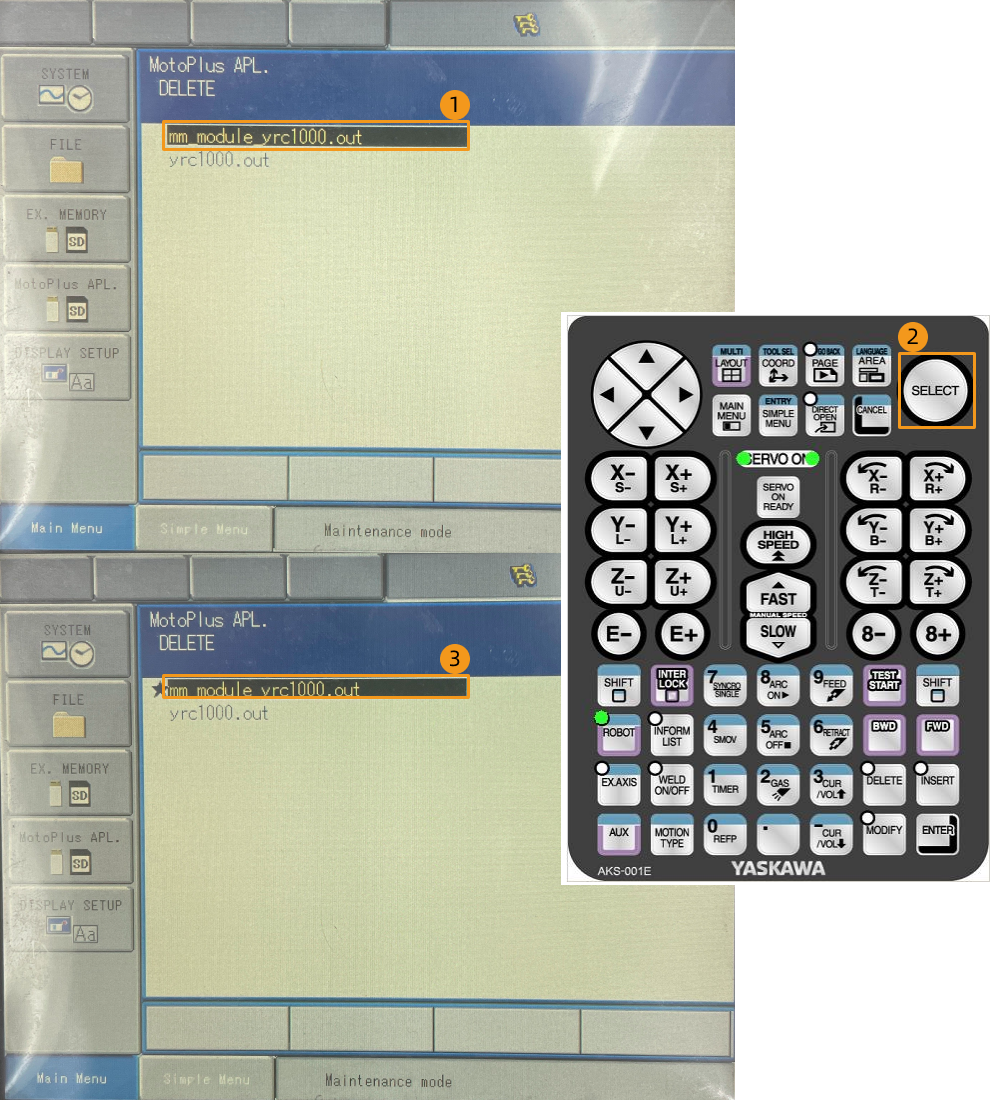
-
Appuyez sur ENTRER sur le boîtier d’enseignement, puis appuyez sur le bouton OUI dans la boîte de dialogue contextuelle pour supprimer le programme.
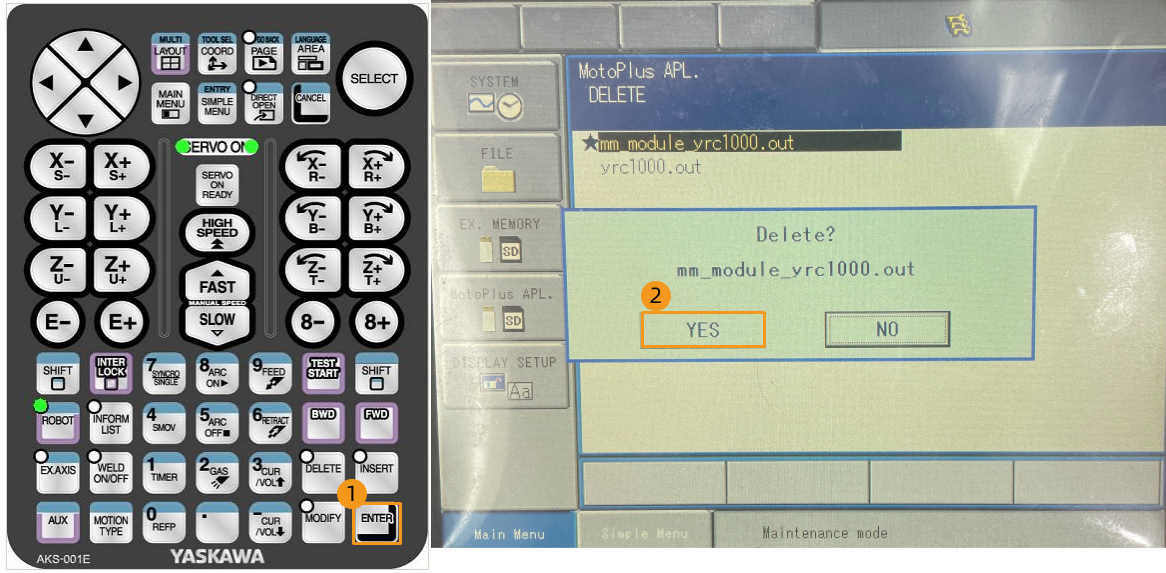
-
Charger les fichiers de programme
Charger le fichier de programme backend sur le robot
-
Maintenez enfoncée la touche MENU PRINCIPAL sur le boîtier d’enseignement, puis mettez le robot sous tension pour entrer en mode de maintenance.
Si le robot est déjà démarré, redémarrez-le en maintenant la touche MENU PRINCIPAL du boîtier d’enseignement enfoncée. -
En mode de maintenance, sélectionnez .
-
Saisissez le mot de passe (seize 9 par défaut), puis sélectionnez Entrer pour accéder au MODE DE GESTION.
-
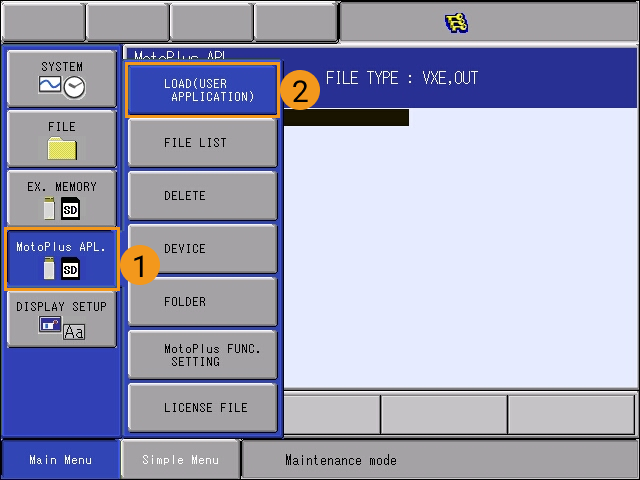
Sélectionnez dans le Menu principal.
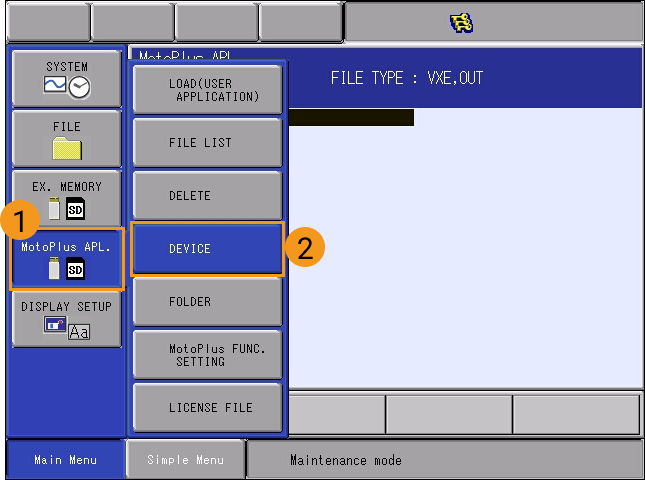
-
Sélectionnez .
-
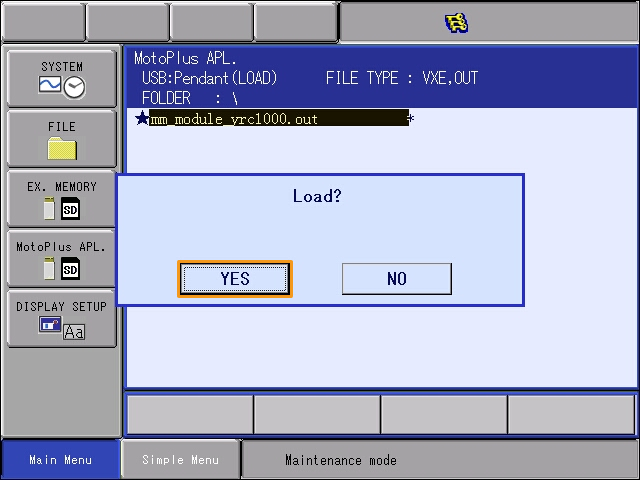
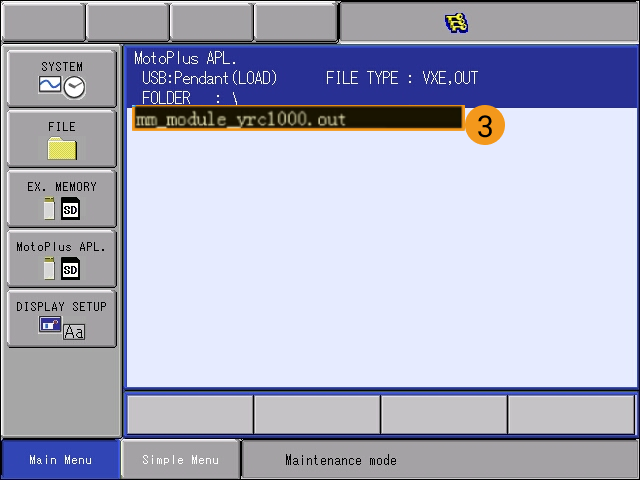
Sélectionnez mm_module_yrc1000.out. Appuyez sur ENTRER sur le boîtier d’enseignement puis sélectionnez OUI pour commencer le chargement.
Si vous utilisez le contrôleur DX200 , vous devez sélectionner mm_module_dx200.out à cette étape. 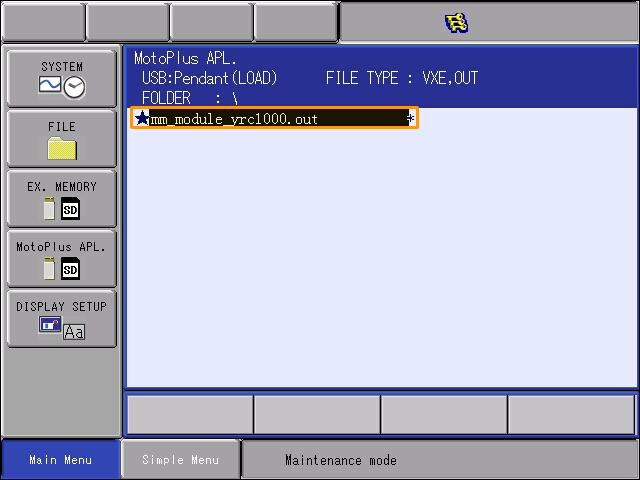
-
Une fois le chargement terminé, sélectionnez . Si vous voyez le fichier de programme backend (mm_module_yrc1000.out), le chargement du fichier de programme backend est réussi.
Si vous utilisez le contrôleur DX200 , vous verrez mm_module_dx200.out ici après la réussite du chargement. 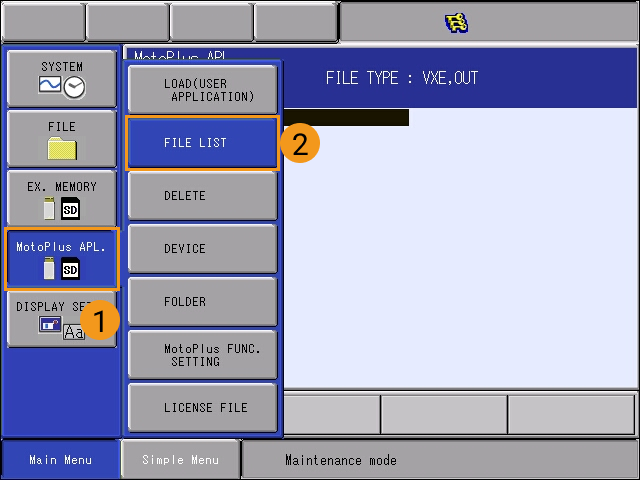
-
Après avoir chargé le fichier de programme backend, redémarrez le robot pour entrer en mode en ligne.
Vous devez charger les fichiers de programme frontend et les fichiers de programme d’exemple en mode en ligne. Par conséquent, vous devez effectuer cette opération après le chargement du fichier de programme backend.
Charger les fichiers de programme frontend sur le robot
-
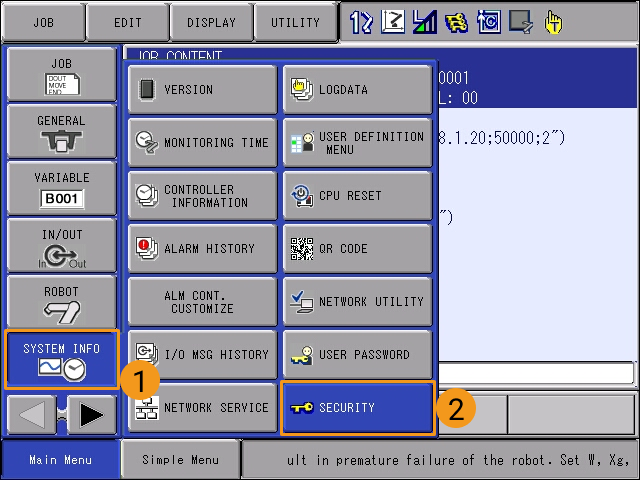
En mode en ligne, sélectionnez dans le Menu principal du boîtier d’enseignement.
-
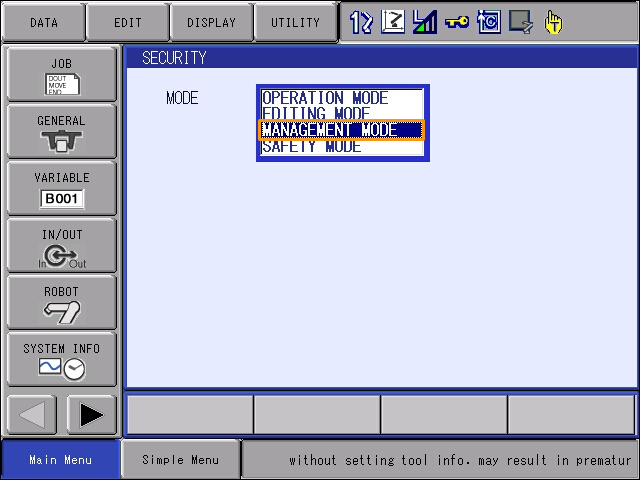
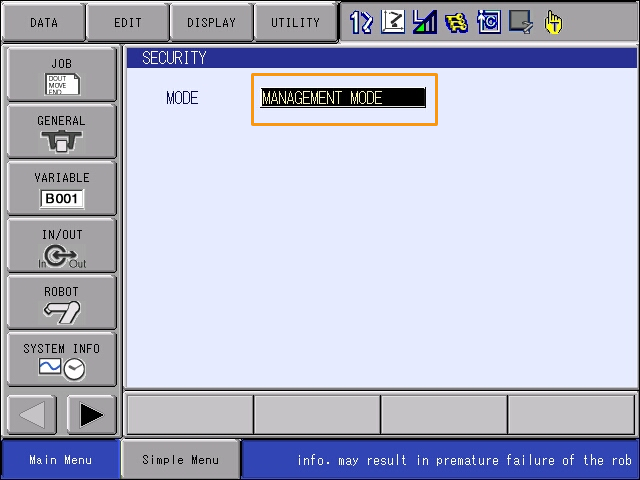
Sélectionnez MODE DE GESTION dans le menu déroulant.
-
Entrez le mot de passe par défaut, qui est seize 9.
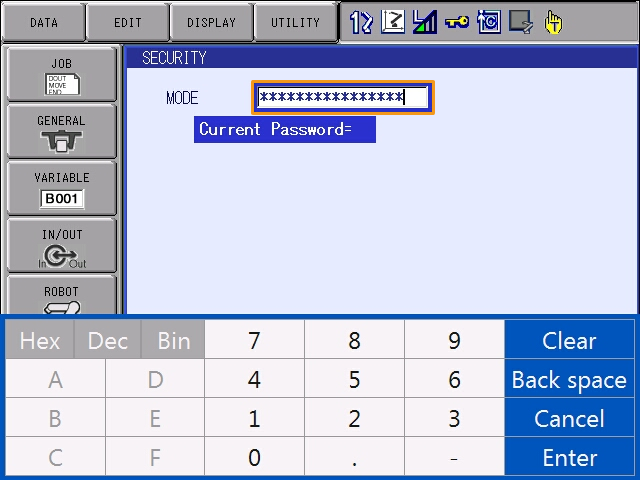
Sélectionnez ENTRER dans le coin inférieur droit de l’écran du boîtier d’enseignement pour entrer en mode de gestion.
-
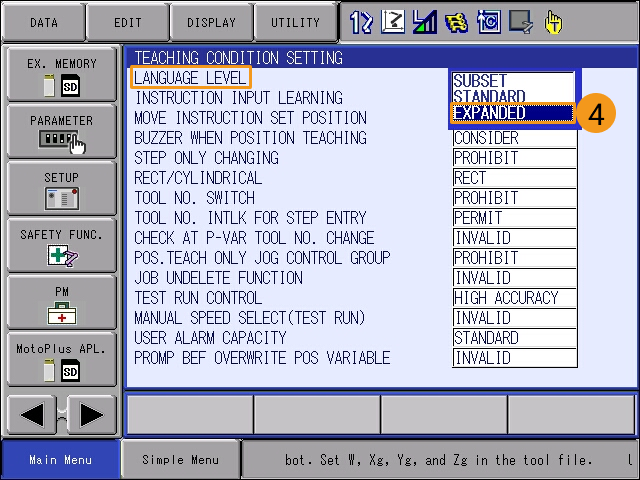
Sélectionnez le bouton flèche droite
 dans le coin inférieur gauche de l’écran du boîtier d’enseignement. Ensuite, sélectionnez , et choisissez ÉTENDU dans le menu déroulant de NIVEAU DE LANGAGE.
dans le coin inférieur gauche de l’écran du boîtier d’enseignement. Ensuite, sélectionnez , et choisissez ÉTENDU dans le menu déroulant de NIVEAU DE LANGAGE.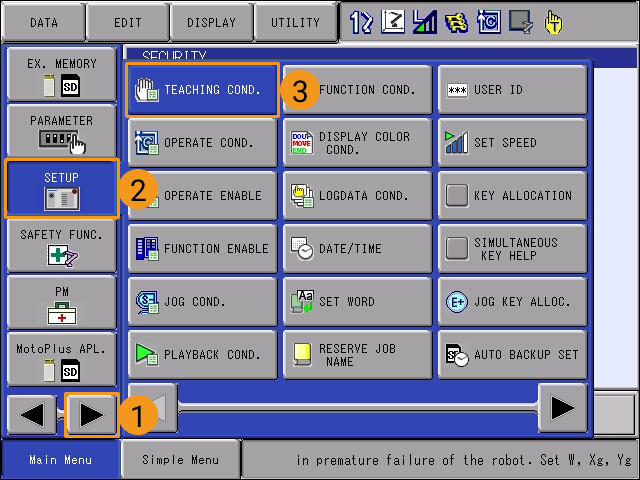
-
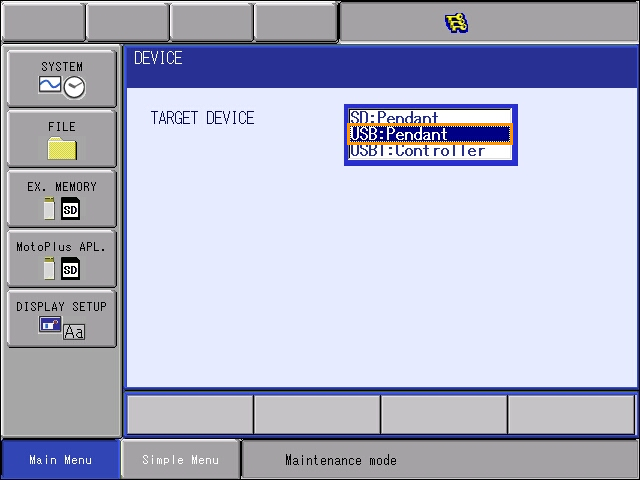
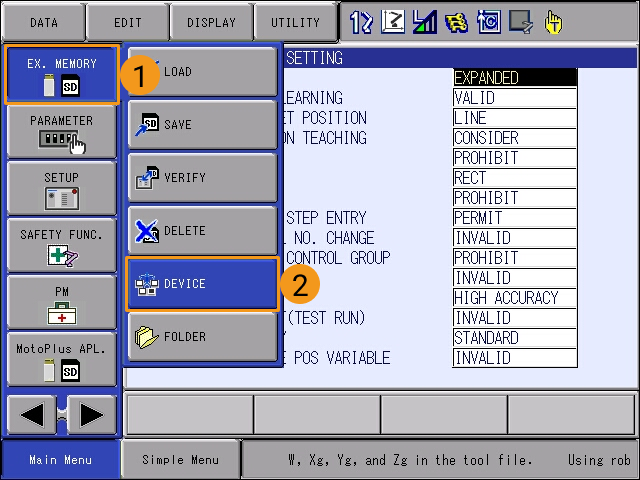
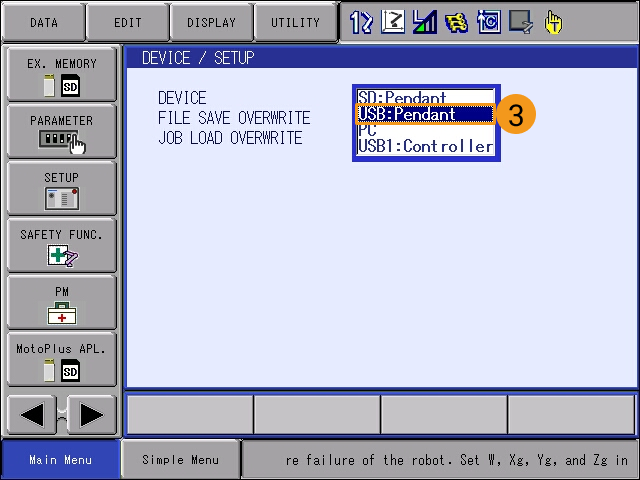
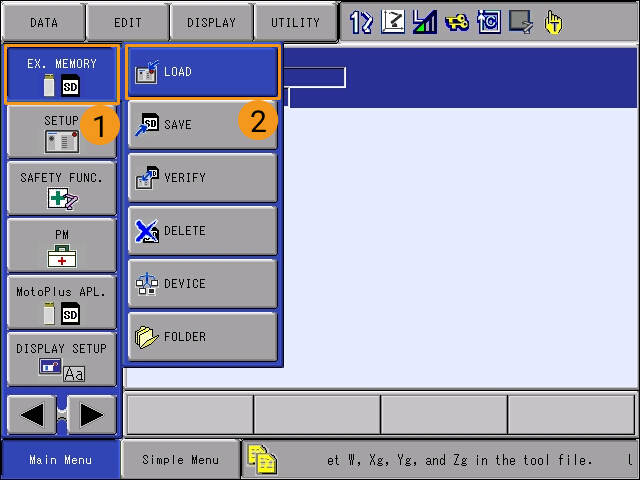
Sélectionnez , puis sélectionnez USB:Pendant pour PÉRIPHÉRIQUE.
-
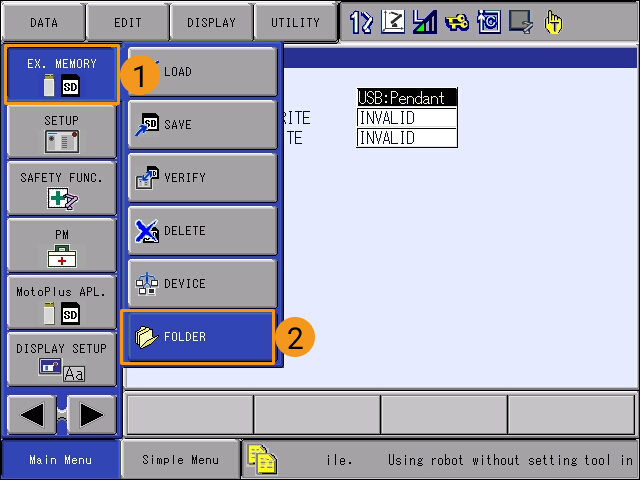
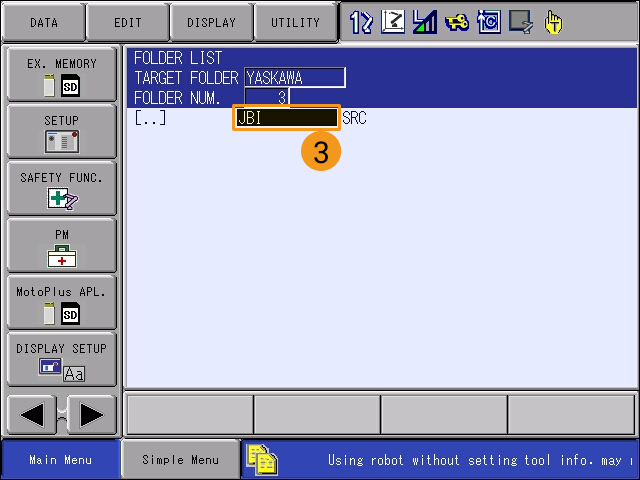
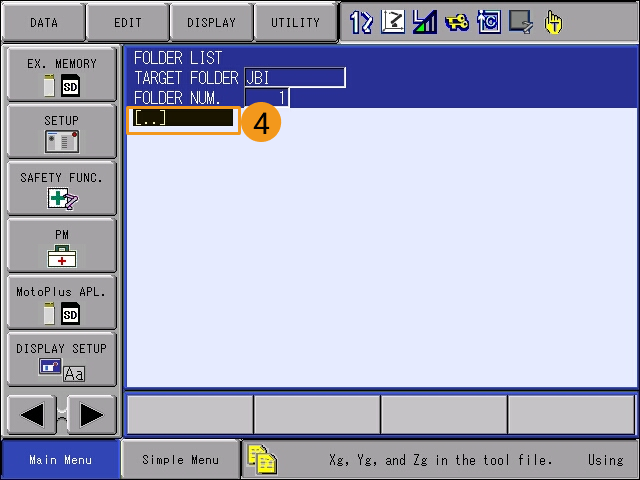
Sélectionnez . Dans la LISTE DES DOSSIERS, sélectionnez et entrez dans le dossier JBI.
-
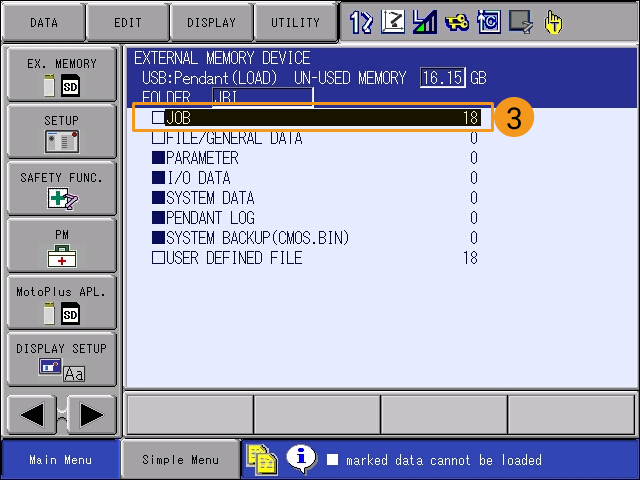
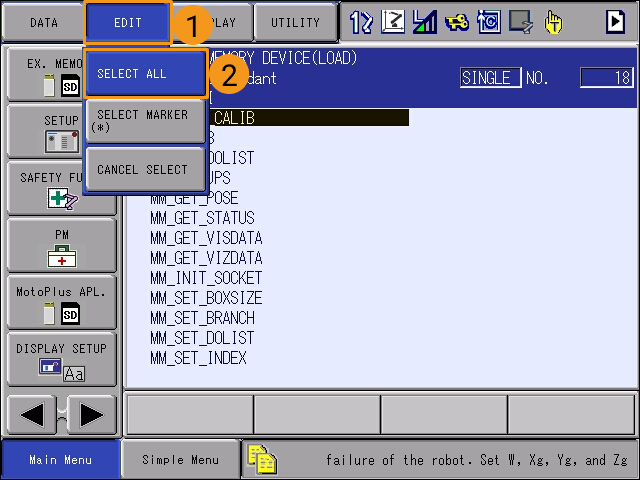
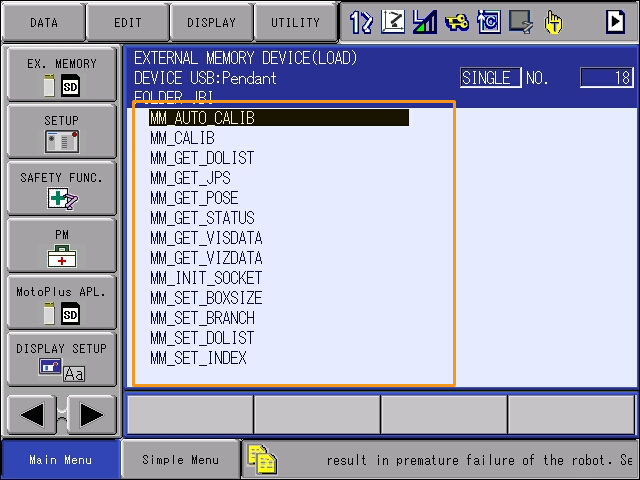
Sélectionnez . Sélectionnez JOB, et les programmes à charger s’afficheront.
-
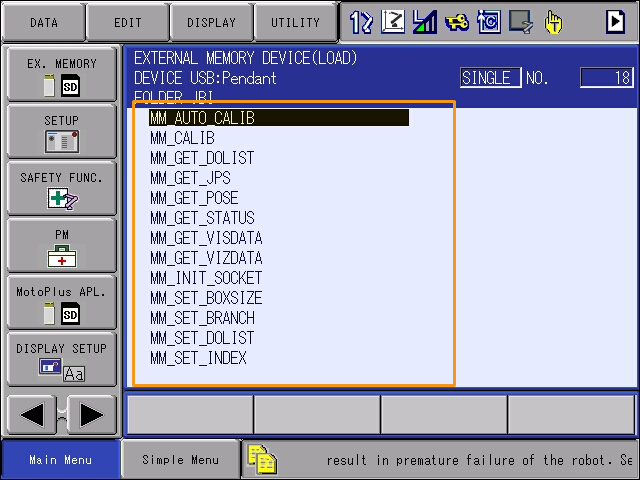
Sélectionnez .
-
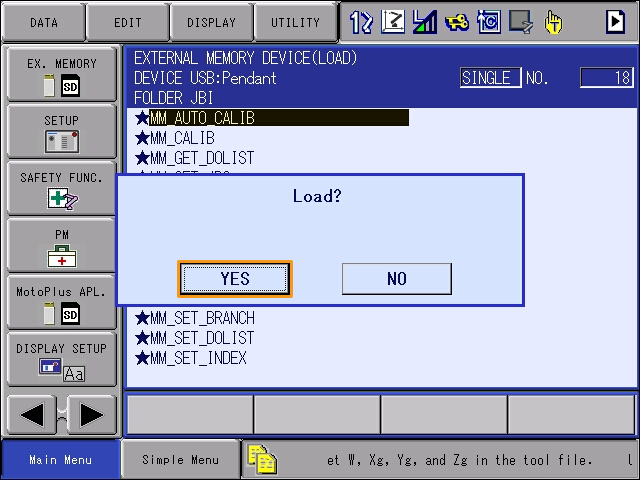
Appuyez sur ENTRER sur le boîtier d’enseignement. Sélectionnez OUI dans le message contextuel pour commencer le chargement des programmes frontend.
-
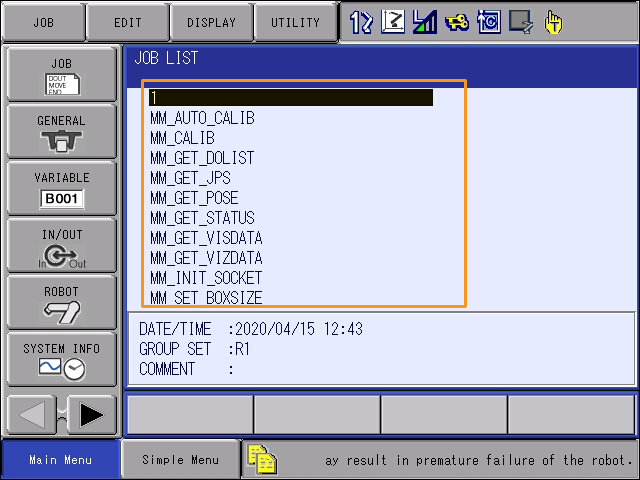
Après avoir chargé les programmes frontend, sélectionnez pour afficher la liste des programmes chargés. Si vous pouvez voir tous les programmes frontend dans la LISTE DES JOBS, le chargement est réussi.
Tester la communication de l’Interface Standard
-
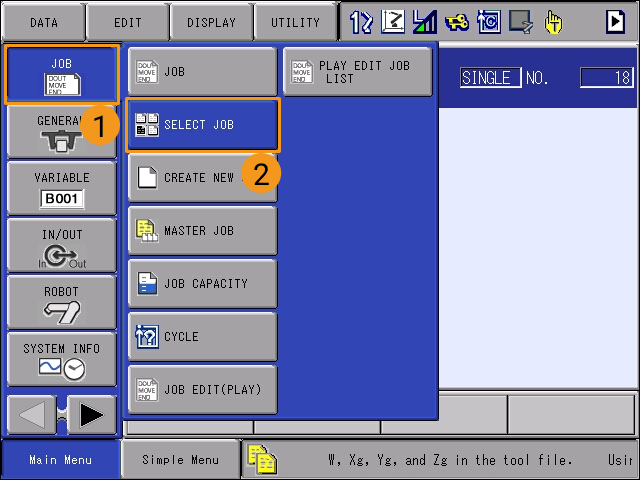
Sur le boîtier d’enseignement, sélectionnez dans le Menu principal pour entrer dans l’interface LISTE DES JOBS.
-
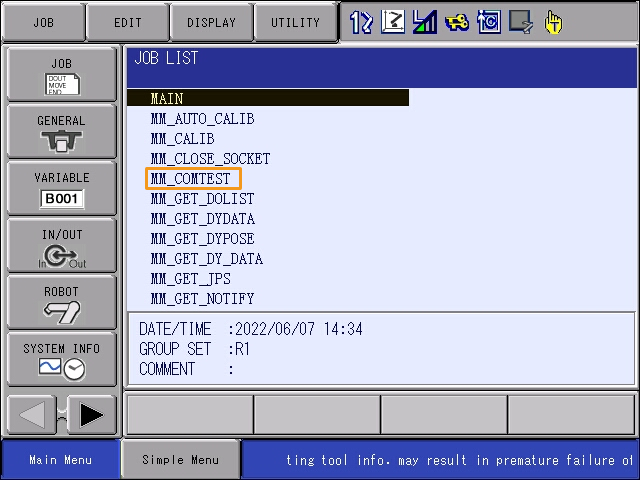
Sélectionnez le programme MM_COMTEST, puis appuyez sur SÉLECTIONNER pour ouvrir le programme.
-
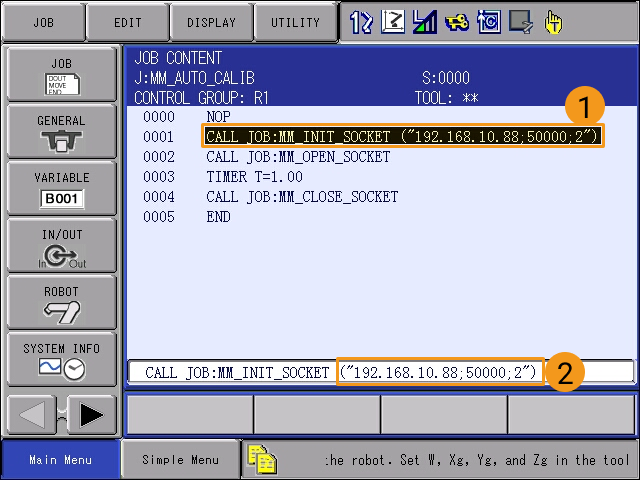
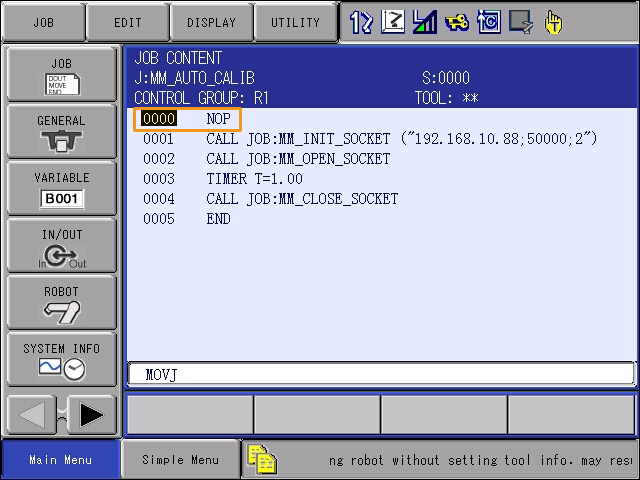
Sélectionnez le contenu de la ligne 0001, puis sélectionnez l’adresse IP et le numéro de port dans la zone de texte en bas. Appuyez sur ENTRER pour accéder à l’interface d’édition.
-
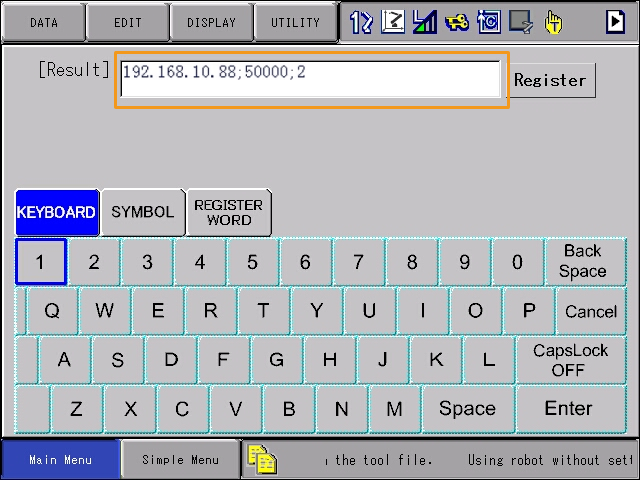
Modifiez l’adresse IP pour celle de l’IPC. Si le numéro de port hôte défini dans Mech-Vision a été modifié, le numéro de port 50000 ici doit être modifié en conséquence afin de le rendre cohérent avec le numéro de port hôte défini dans Mech-Vision.
-
Tournez la clé du boîtier d’enseignement sur le mode ENSEIGNEMENT.
-
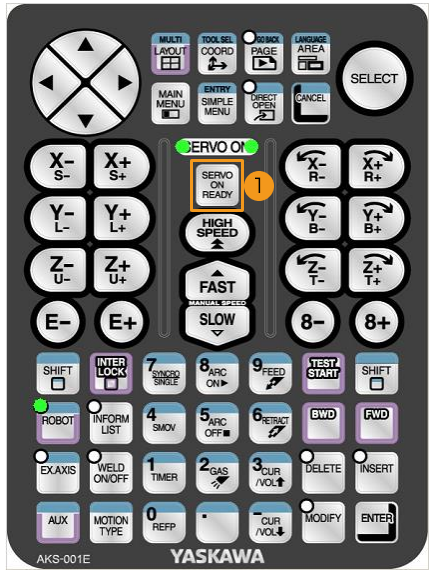
En mode ENSEIGNEMENT, appuyez sur SERVO PRÊT sur le boîtier d’enseignement, puis maintenez l’interrupteur homme mort à l’arrière tout en ramenant le curseur à la ligne 0000.
Cette étape garantit que le job démarre à partir de la première ligne.

-
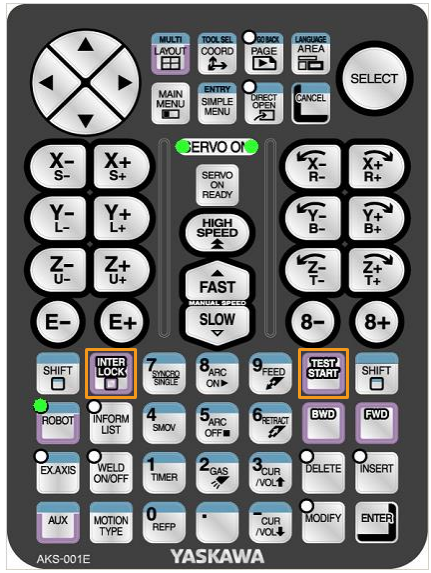
Appuyez simultanément sur VERROU INTER et DÉMARRAGE TEST sur le boîtier d’enseignement.
Cette étape est un test de communication.
-
Si la communication entre le robot et le système de vision est établie, un journal sera enregistré dans l’onglet Console du panneau Log de Mech-Vision.
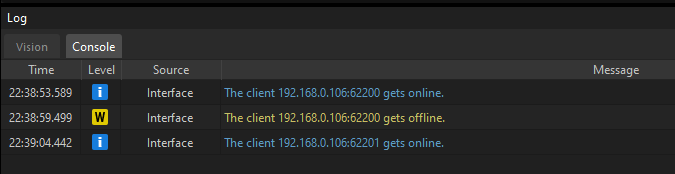
Vous avez maintenant chargé le programme d’Interface Standard du robot et les fichiers de configuration dans le système du robot pour établir la communication via l’Interface Standard entre le système de vision et le robot.