Guide pour améliorer le temps de cycle de l’application
Cette section explique comment améliorer le temps de cycle de chaque phase de traitement d’une application guidée par vision 3D.
Capture d’images
Réduire le temps d’exposition
Tout en garantissant une qualité d’image stable, utilisez le logiciel Mech-Eye Viewer pour minimiser le nombre d’expositions et raccourcir autant que possible le temps d’exposition.
-
Pour les images 3D, moins il y a d’expositions et plus le temps d’exposition est court, plus le temps de cycle est réduit.
-
Pour les images 2D, l’ordre des modes d’exposition par consommation de temps est : Flash < Temporisé < Auto. Si les images 2D ne sont pas nécessaires ou si cela est permis, le mode Flash peut être sélectionné.
| Veuillez noter que la réduction du temps d’exposition ne doit pas se faire au détriment de la qualité de l’image. Pour la reconnaissance de pièces métalliques aux structures complexes ou d’objets avec de nombreux détails, il est recommandé de basculer le mode d’exposition 2D et de définir deux ou trois temps d’exposition 3D différents afin de capturer plus d’informations. |
Pour l’ajustement des paramètres d’exposition 2D/3D, veuillez consulter Améliorer la vitesse d’acquisition d’images et Guide de référence des paramètres de la caméra.
En outre, si le temps d’exposition est trop long, vous pouvez envisager d’ajouter une source lumineuse externe afin de réduire le temps d’exposition interne, améliorant ainsi la vitesse de capture.
Mettre à jour le logiciel Mech-Eye Viewer et le microprogramme de la caméra vers la dernière version
Le logiciel et le microprogramme de la caméra dans Mech-Eye Viewer sont continuellement améliorés par Mech-Mind pour accélérer la génération des cartes de profondeur et des nuages de points ainsi que la vitesse de capture d’images de la caméra.
Par conséquent, veuillez mettre à niveau votre Mech-Eye Viewer et le microprogramme de la caméra vers la dernière version.
Ajuster le ROI et la plage de profondeur
Définissez le ROI et la plage de profondeur dans Mech-Eye Viewer en fonction du champ de vision maximal requis par le projet et supprimez les régions et profondeurs inutiles, réduisant ainsi le temps nécessaire à la caméra pour générer des images.
Pour l’ajustement du ROI et de la plage de profondeur, veuillez consulter Guide de référence des paramètres de la caméra.
Garantir la vitesse de transmission des données de la caméra
La vitesse de transmission des données est affichée lorsque la caméra fonctionne. La plage normale est de 700 à 800 Mbps.
Après la connexion de la caméra au logiciel Mech-Eye Viewer, vous pouvez vérifier la vitesse de transmission des données de la caméra connectée dans la zone d’acquisition des données.
Si la vitesse de transmission des données est trop faible, le temps de transfert deviendra excessivement long. Assurez-vous que le commutateur réseau, l’IPC et les autres dispositifs répondent aux normes industrielles de transmission gigabit.
| La vitesse de transmission des données n’est affichée que lorsqu’une transmission est en cours. De plus, lorsque la quantité de données à transmettre est faible, la vitesse de transmission peut être relativement basse. |
Remplacer la caméra
Lors de la phase de conception de la solution de vision, outre la plage de travail de la caméra, vous devez prêter attention aux différences de temps de capture typique entre les différents produits de caméra. Les temps de capture spécifiques figurent dans Spécifications techniques des caméras.
Si le temps de cycle actuel de l’application ne satisfait pas aux exigences du projet et que d’autres mesures d’optimisation ne peuvent pas améliorer efficacement le temps de cycle global, vous pouvez envisager de remplacer la caméra pour obtenir une amélioration.
Traitement de la vision
Accélération des étapes
Capturer des images depuis la caméra
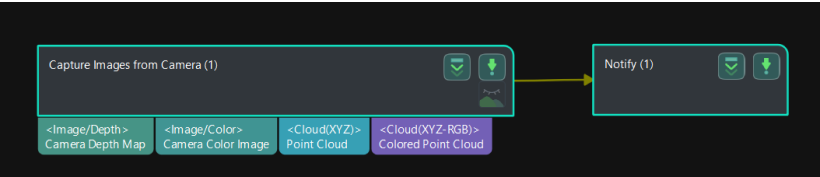
Dans les projets Mech-Vision, l’étape « Capturer des images depuis la caméra » est l’une des plus importantes et représente généralement environ 40 % du temps. L’optimisation de cette étape peut améliorer significativement la vitesse de traitement ultérieure. Voici des recommandations de configuration spécifiques pour réduire le temps d’exécution de cette étape :
-
Si le projet ne nécessite pas de traitement 2D, vous pouvez éviter de connecter le port « Image couleur de la caméra ». Cela réduit directement le temps du traitement ultérieur.
-
Si le projet n’utilise pas le logiciel Mech-Viz, le robot peut être informé de se déplacer vers une position fixe immédiatement après la capture des images. Cela évite que le robot attende les résultats de vision pour commencer à se déplacer, optimisant ainsi la vitesse et l’efficacité globales. Notez que cette méthode doit être implémentée conjointement avec le système de vision et les programmes du robot.
Étapes liées au traitement du nuage de points
Dans les projets Mech-Vision, le traitement du nuage de points est l’une des étapes clés. L’optimisation de ce traitement peut grandement améliorer la vitesse et l’efficacité globales. Voici quelques suggestions d’amélioration :
-
Supprimer les nuages de points superflus
Utilisez l’outil « Définir un ROI 3D » dans l’étape « Extraire des points 3D dans un ROI 3D » : En définissant un ROI 3D, vous pouvez extraire uniquement les nuages de points dans la zone cible et exclure les nuages de points d’arrière-plan indésirables. Cela aide à réduire le temps des traitements de nuage de points suivants, y compris l’appariement grossier et fin.
-
Sous-échantillonnage du nuage de points
Pour les projets qui ne nécessitent pas des nuages de points à haute densité, vous pouvez envisager d’utiliser l’étape « Sous-échantillonnage du nuage de points ». La diminution du nombre de points dans le nuage de points peut grandement améliorer la vitesse de traitement, en particulier lors de l’appariement des arêtes ou de l’obtention du masque de la couche la plus élevée.
Étapes liées à l’appariement
Dans les projets Mech-Vision, l’utilisation de l’appariement 3D pour la reconnaissance est une opération courante. L’optimisation du processus d’appariement peut grandement améliorer la vitesse et la précision de reconnaissance. Voici quelques suggestions d’amélioration :
-
Appariement grossier et fin
Appariement grossier : Au début, l’appariement grossier est effectué pour calculer la position approximative du nuage de points du modèle dans le nuage de points spatial. Cette étape peut identifier rapidement des régions potentielles d’appariement, fournissant ainsi une base pour l’appariement précis ultérieur.
Appariement fin : Effectuez l’appariement fin sur la base du résultat de l’appariement grossier afin de calculer avec précision l’appariement entre le modèle et le nuage de points spatial. L’appariement fin utilise généralement des algorithmes plus complexes et des informations de nuage de points plus détaillées pour assurer un positionnement et une reconnaissance précis de l’objet.
-
Sélection du mode d’appariement
Appariement des arêtes et des surfaces : Sélectionnez le mode d’appariement approprié selon les caractéristiques de l’objet cible. L’appariement des arêtes offre généralement une vitesse d’appariement plus rapide et de meilleurs résultats pour les objets aux arêtes et aux contours nets. Pour les objets aux structures plus complexes, un appariement des surfaces peut être requis afin d’obtenir des résultats d’appariement plus précis.
-
Optimisation de l’appariement multi-objets cibles
Lors de l’appariement des objets cibles, il est recommandé de réduire la valeur « résultats de sortie dans un seul nuage de points » pour l’appariement grossier et l’appariement fin tout en garantissant les résultats. Cette mesure peut améliorer efficacement la vitesse d’appariement et la vitesse de réponse du système pour éviter la surcharge et la baisse d’efficacité du traitement.
Étapes liées au deep learning
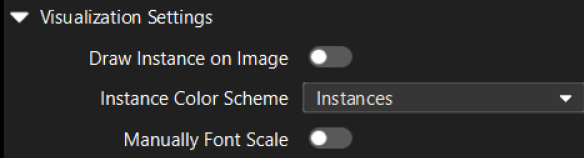
Si le projet Mech-Vision utilise l’étape « Inférence du package de modèle de deep learning » pour assister la reconnaissance, désactivez l’option Dessiner l’instance sur l’image dans les Paramètres de visualisation afin d’améliorer la vitesse d’exécution de l’étape.
Désactiver la sortie de débogage
Sortie de débogage est généralement utilisée pour visualiser et analyser le résultat de visualisation ou les informations de débogage de chaque étape. Le débogage est très utile lors du déploiement de l’application, mais n’est pas nécessaire pendant les opérations de production normales.
La désactivation de la sortie de débogage peut réduire la charge de calcul supplémentaire et l’utilisation de la mémoire, augmentant ainsi la vitesse du traitement de la vision.
Optimiser le mode de génération du tableau de points de prise
Lorsque le tableau de points de prise défini dans l’éditeur d’objets cibles contient un grand nombre de points de prise, il est généralement recommandé d’activer la fonction Résultat de vision avec tableau de points de prise dans le processus « Définir le point de prise ». Ce faisant, les points de prise non qualifiés sont filtrés avant la planification de trajectoire, et un tableau de points de prise optimisé est produit afin d’éviter un temps de planification excessivement long par la suite.
Améliorer les performances de l’IPC
La tâche de traitement de la vision exige de hautes performances de calcul. Choisir un IPC plus performant peut grandement améliorer la vitesse de traitement et les capacités de traitement parallèle. En outre, l’optimisation des performances de l’IPC peut améliorer la vitesse d’acquisition d’images et de transmission des données. Ensemble, ces facteurs peuvent améliorer efficacement l’efficacité et la réactivité des applications de vision.
Planification de trajectoire
| Dans Mech-Viz, des paramètres inappropriés peuvent entraîner des collisions. Assurez-vous d’effectuer des tests approfondis lors de la modification des paramètres. |
Améliorer la planification temporelle
Le robot commence à se déplacer après l’exposition de la caméra (Capture-and-Move)
Pendant le processus de picking, le temps de cycle peut être optimisé à l’aide de la stratégie Capture-and-Move, qui permet au robot de se déplacer immédiatement après l’exposition de la caméra tandis que le traitement de la vision s’exécute en parallèle. Cette stratégie réduit considérablement le temps d’inactivité du robot et raccourcit le cycle pour chaque prise, ce qui la rend particulièrement efficace pour les applications de picking continu à haut débit.
Dans les scénarios EIH utilisant le mode de communication Standard Interface, Capture-and-Move peut être activé comme suit. Dans Mech-Vision, cliquez sur . Puis, activez l’option Retour « 1102 : Déclenché avec succès » après la capture. Une fois que le robot déclenche le projet Mech-Vision et reçoit « 1102 : Déclenché avec succès », il peut quitter immédiatement le point de capture d’image, améliorant ainsi l’efficacité du picking.
Lors de l’utilisation du mode de communication Standard Interface pour la planification de trajectoire dans Mech-Viz, l’étape Notifier peut être ajoutée pour envoyer le signal Exposure_Complete au robot. À la réception de ce signal, le robot peut immédiatement passer à l’action suivante.
|
Si la configuration ci-dessus n’est pas appliquée, Mech-Vision renverra le code d’état 1102 immédiatement au démarrage du projet de vision. Cependant, puisque le robot ne peut pas confirmer si l’exposition de la caméra est terminée, il doit encore attendre la fin complète du projet avant de se déplacer, ce qui entraîne un temps d’arrêt inutile. |
Dans les scénarios ETH utilisant le mode de communication Standard Interface, le système permet au robot de se déplacer immédiatement après l’exposition de la caméra sans nécessiter la configuration ci-dessus.
Acquisition d’image immédiate après la prise des objets cibles par le robot
Pour les scénarios EIH, il est recommandé de revenir au point de capture d’image et de capturer immédiatement des images après que le robot a pris l’objet cible. Avec cette stratégie, le robot n’a besoin de s’arrêter que pendant la capture d’image et commence le dépôt après la capture. Pendant que le robot dépose l’objet cible, les données sont traitées en arrière-plan afin que le robot puisse rapidement prendre l’objet cible suivant après le dépôt.
|
Si le temps d’exécution nécessaire au robot pour déposer l’objet cible est plus court que le temps de traitement de la vision et d’émission de la pose de prise, le robot doit s’arrêter et attendre. |
Pour le scénario ETH, il est recommandé de capturer des images après que le robot a pris l’objet cible et s’est déplacé hors du champ de vision de la caméra. Cette stratégie peut ne pas nécessiter l’arrêt du robot pour la capture d’image. Pendant que le robot se déplace, les données sont traitées en arrière-plan afin que le robot puisse rapidement prendre l’objet cible suivant après le dépôt.
|
Le fait que le robot doive attendre dépend de laquelle des deux opérations suivantes prend le plus de temps:
Si le déplacement du robot est plus long, le robot n’a pas besoin de s’arrêter et d’attendre. Si la seconde est plus longue, le robot doit s’arrêter et attendre. |
Pour certaines applications de dépalletisation de cartons, tout en garantissant que les positions des autres cartons ne changent pas après chaque prise, vous pouvez utiliser la solution « Capturer une seule image pour réaliser le picking de plusieurs objets ». Autrement dit, Mech-Vision peut reconnaître plusieurs objets à la fois et fournir toutes leurs poses, et le robot peut prendre tous les cartons reconnus par lots. Cela permet d’économiser significativement le temps de capture d’image. De plus, si la pince est suffisamment grande, vous pouvez également envisager de prendre plusieurs boîtes à la fois pour améliorer davantage l’efficacité de picking.
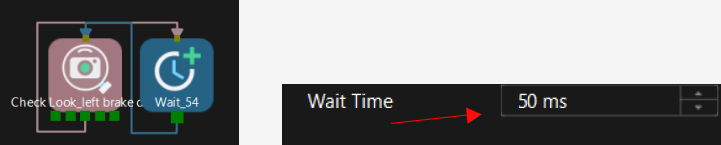
Pour les scénarios où le picking est répété, il est recommandé de réduire le temps d’attente pour obtenir le résultat de vision. Il est souvent conseillé de limiter ce temps d’attente à moins de 50 ms afin de garantir que le système puisse répondre rapidement et fonctionner efficacement.
Améliorer la pince et la planification des signaux
Les recommandations pour améliorer la pince et la planification des signaux sont les suivantes :
-
Réduire le temps d’attente après l’ouverture et la fermeture de la pince.
Un court temps d’attente peut entraîner un échec de prise et un positionnement instable. Veuillez vous assurer d’effectuer des tests approfondis avant de modifier afin de vérifier la stabilité de la prise et du dépôt. -
Ouvrir à l’avance la pince à vide.
Assurez-vous que la ventouse est entièrement ventilée au préalable, ce qui peut améliorer le temps de cycle pendant le picking et éviter l’impact de l’exposition sur d’autres objets cibles.
-
Modifier le signal de commutation de la pince pendant le mouvement.
La modification dynamique du signal de commutation de la pince lorsque le robot se déplace peut rendre le mouvement plus fluide et réduire les à-coups, optimisant ainsi le temps de cycle global du projet.
-
Simplifier le modèle de la pince.
L’optimisation du modèle de la pince pour supprimer les éléments inutiles à la détection de collision peut réduire significativement le temps que Mech-Viz consacre au calcul des collisions. La simplification du modèle peut accélérer les calculs et améliorer l’efficacité de réponse globale du système.
Améliorer la planification de la scène
Les recommandations pour améliorer la planification de la scène sont les suivantes :
-
Simplifier le modèle de la scène.
Envisagez de simplifier des modèles de scène complexes sans compromettre la précision de la détection de collision. En réduisant les solides géométriques complexes ou les détails peu importants de la scène, vous pouvez réduire significativement le temps que Mech-Viz consacre au calcul des collisions.
-
Remplacer des bacs dynamiques par des bacs fixes.
L’utilisation d’un bac fixe permet d’éviter la nécessité fréquente de mettre à jour la position du bac. Cette méthode s’applique aux scénarios où la position de chargement reste relativement inchangée. En utilisant un bac fixe, vous pouvez réduire le temps de réponse du robot aux changements de scène pendant la planification de trajectoire, raccourcissant ainsi le temps de planification et améliorant l’efficacité d’exécution.
Assurez-vous que les positions de chargement sont cohérentes lors de l’utilisation de cette méthode d’optimisation.
Améliorer la planification de trajectoire
Les recommandations pour améliorer la planification de trajectoire sont les suivantes :
-
Paramétrer correctement le point intermédiaire.
Assurez-vous que le point intermédiaire est aussi proche que possible du point de prise et du point de dépôt, et minimisez les points intermédiaires inutiles. L’optimisation de la position du point intermédiaire peut réduire les mouvements inutiles du robot pendant la prise et le dépôt, améliorant ainsi l’efficacité de la planification de trajectoire et le temps de cycle global.
-
Réduire la rotation du 6e axe du robot.
Pour certains robots, le 6e axe tourne lentement ; il convient donc de minimiser ces mouvements lors de la planification de trajectoire. En concevant correctement la symétrie de la pince et la position de dépôt de l’objet cible, la dépendance au 6e axe peut être réduite, améliorant ainsi la vitesse d’opération du robot et le temps de cycle.
-
Augmenter le rayon de fusion du point intermédiaire.
L’augmentation du rayon de fusion peut créer une trajectoire plus fluide et continue pour le mouvement du robot lors du réglage du point intermédiaire. Une trajectoire fluide réduit les temps d’accélération et de décélération du robot, améliorant ainsi la vitesse de déplacement globale et l’efficacité de la planification de trajectoire.
-
Diminuer la hauteur de levage de l’axe Z.
Réduisez autant que possible la hauteur de levage de l’axe Z du robot après la prise, sans affecter la planification de trajectoire et la sécurité. La réduction de la hauteur de levage peut raccourcir la distance de déplacement relative du robot, réduisant ainsi le temps de déplacement et améliorant le temps de cycle.
Réutiliser le résultat de vision
Pour améliorer l’efficacité du temps de cycle, un seul résultat de vision peut être réutilisé lors de pickings continus. En capturant les poses de plusieurs objets cibles à la fois, le robot peut prendre tous les objets cibles à tour de rôle jusqu’à ce que tous les points de prise du résultat de vision actuel aient été traités, puis déclencher la capture d’image suivante. Cette stratégie peut réduire significativement la fréquence des captures d’image, économisant ainsi du temps.
Dans les applications pratiques, cela est généralement utilisé conjointement avec l’étape Les points de prise sont-ils épuisés et l’étape Définir l’étiquette pour la branche afin de simplifier la logique du programme et d’améliorer le temps de cycle. Les instructions détaillées sont les suivantes :
-
Capturer les résultats de vision
Activez le paramètre Réutiliser le résultat de vision dans l’étape Déplacement de vision. Cela permet de capturer les poses de plusieurs objets cibles dans une seule image, fournissant des données pour le picking ultérieur.
-
Déterminer si les points de prise sont épuisés
Utilisez l’étape Les points de prise sont-ils épuisés pour détecter si tous les points de prise du résultat de vision actuel ont été traités. Si les points de prise ne sont pas épuisés, le résultat de vision actuel sera utilisé pour compléter le picking. S’ils sont épuisés, la prochaine capture d’image sera déclenchée.
-
Définir l’étiquette pour la branche vers le chemin optimisé
Une fois tous les points de prise épuisés, définissez l’étiquette pour la branche afin d’optimiser la planification de trajectoire entre la prise et le dépôt, réduisant la perte de temps et la nécessité de capturer des images de manière répétée, ce qui diminue le temps de cycle.
-
Exécution en boucle
Le projet Mech-Viz répétera le processus ci-dessus jusqu’à ce que toutes les tâches de picking soient complétées.
|
Lors de l’utilisation de cette méthode, vous devez ajuster la logique de réutilisation du résultat de vision en fonction de la stabilité de position de l’objet cible :
|
Activer le mode opérateur
Dans la barre d’outils de Mech-Viz, cliquez sur l’option Mode opérateur pour activer le mode opérateur.
Une fois le mode opérateur activé, le logiciel bloquera certaines fonctions de détection de collision, notamment « Ignorer le calcul restant de cette solution si le degré de collision dépasse le seuil » et « Ne pas enregistrer dans l’historique du plan ». De plus, le logiciel réduit la densité d’affichage du nuage de points, améliorant ainsi la vitesse d’exécution du logiciel.
Prise et dépôt par robot
La précision absolue du robot doit être assurée pendant la prise et le dépôt. Les responsables de maintenance doivent effectuer des vérifications régulières du robot.
-
Vérifiez si la base du robot vibre. Le cas échéant, vous devez cesser d’utiliser le robot et re-fixer la base.
-
Vérifiez si la position zéro du robot est décalée. Un décalage de la position zéro peut affecter la précision du robot. Pour plus d’instructions sur la vérification de la précision absolue du robot, veuillez consulter Vérifier la précision absolue du robot.