Configuration de la communication du robot
Configuration matérielle du système de vision finalise l’intégration matérielle du système de vision avec le système robotique, tandis que la configuration de la communication du robot complètera l’intégration de la communication entre les deux systèmes. Cela garantit que le système de vision et le robot peuvent échanger des données avec précision en temps réel.
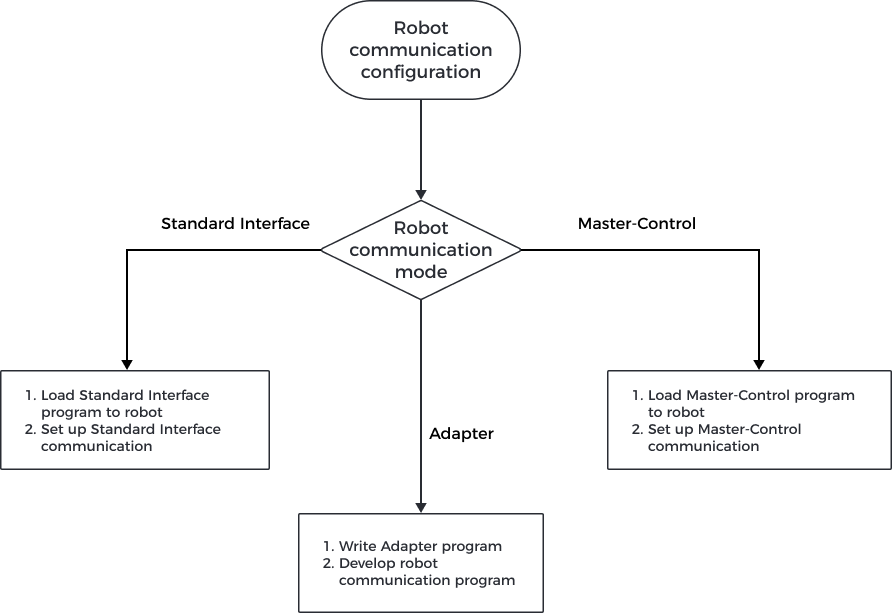
Pour configurer la communication du robot, vous devez généralement charger dans le système du robot le programme de communication et les fichiers de configuration fournis par Mech-Mind, puis effectuer les configurations de communication correspondantes.
Selon les différents modes de communication du robot sélectionnés lors de la phase de conception de la solution de vision, la configuration à réaliser à cette étape varie également.
-
Si vous avez sélectionné le mode de communication Standard Interface lors de la phase de conception de la solution de vision, vous devez charger à cette étape dans le système du robot le programme Standard Interface et les fichiers de configuration du robot. Vous devez également effectuer les configurations de communication correspondantes dans ce mode.
Vous pouvez rechercher le Manuel utilisateur concernant la communication Standard Interface en fonction de la marque de votre robot ou de votre PLC dans la section Adaptation Standard Interface.
-
Si vous avez sélectionné le mode de communication Master-Control lors de la phase de conception de la solution de vision, vous devez charger à cette étape dans le système du robot le programme Master-Control et les fichiers de configuration du robot. Vous devez également effectuer les configurations de communication correspondantes dans ce mode.
Vous pouvez rechercher le Manuel utilisateur concernant la communication Master-Control en fonction de la marque de votre robot dans la section Adaptation Master-Control.
-
Si vous avez sélectionné le mode de communication Adapter lors de la phase de conception de la solution de vision, vous devez écrire à cette étape un programme Adapter pour le système de vision et un programme de communication robot correspondant côté robot.
La communication Adapter est un mode de communication personnalisé, et exige donc que l’utilisateur possède de solides compétences en programmation. Pour plus de détails sur la communication Adapter, consultez Communication Adapter.