Approche pour garantir une précision de préhension conforme
Tout au long des étapes de déploiement de l’application, vous devez prendre des mesures ciblées d’amélioration de la précision afin de réduire les erreurs possibles. Cela garantit que la précision de la préhension est conforme aux exigences du projet.
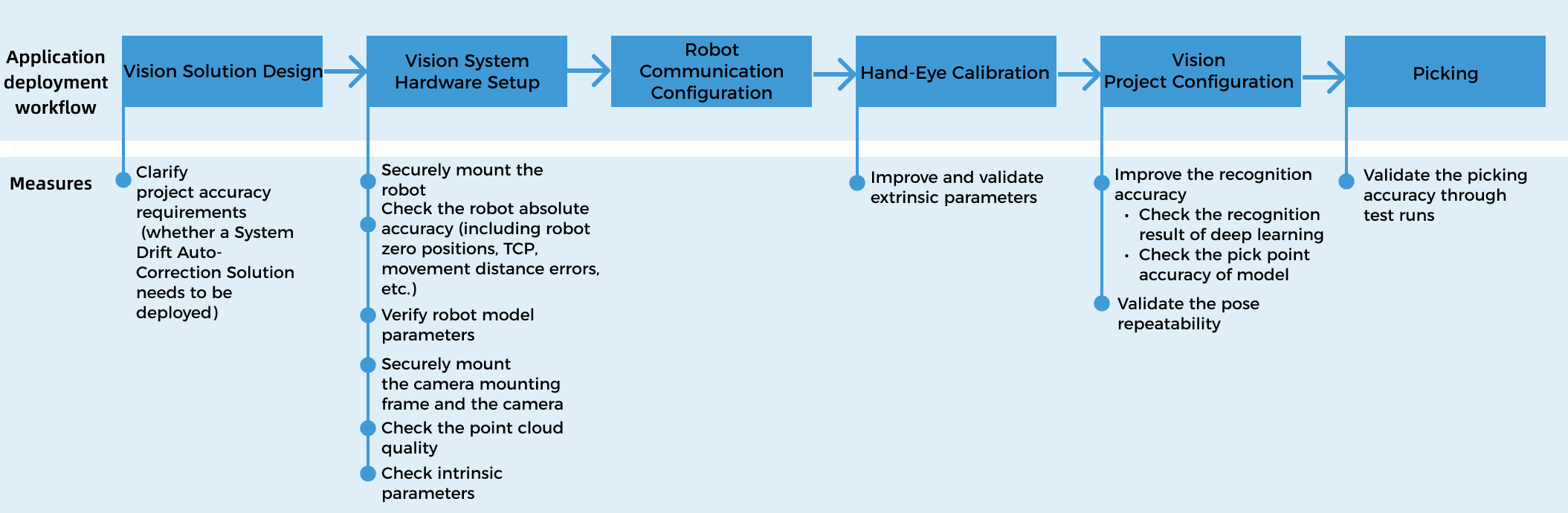
Les mesures d’amélioration de la précision à prendre à chaque étape du déploiement sont décrites ci-dessous.
| Phase de déploiement | Mesure d’amélioration | Description |
|---|---|---|
1. Conception de la solution de vision |
Préciser les exigences de précision du projet. |
Avant de déployer l’application, définir les exigences de précision auxquelles elle doit répondre. Pour les scénarios nécessitant une haute précision, confirmer si une solution d’auto-correction de dérive du système doit être déployée. |
2. Installation matérielle du système de vision |
Fixer solidement le robot. |
Un montage non sécurisé du robot peut affecter sa répétabilité. |
Vérifier la précision absolue du robot. |
Vérifier si l’une des positions zéro du robot est manquante, contrôler l’erreur de distance de déplacement et confirmer la précision du TCP. |
|
Vérifier les paramètres du modèle du robot. |
Si les paramètres du modèle du robot sont inexacts, cela entraînera des points de passage inexacts fournis par le système de vision, voire des collisions. |
|
Fixer solidement le support de montage de la caméra et la caméra. |
Un montage non sécurisé du support de caméra et de la caméra peut compromettre la précision absolue et la répétabilité de la caméra. |
|
Vérifier la qualité du nuage de points. |
Une mauvaise qualité du nuage de points affecte la précision de la reconnaissance visuelle. |
|
Vérifier les paramètres intrinsèques. |
S’assurer que les paramètres intrinsèques de la caméra sont aptes à l’emploi. |
|
3. Configuration de la communication du robot |
/ |
/ |
4. Calibration main-œil |
Améliorer et valider les paramètres extrinsèques. |
De grandes erreurs dans les paramètres extrinsèques peuvent augmenter les erreurs de pose de préhension. Après la calibration main-œil, vérifier la précision des paramètres extrinsèques. |
5. Configuration du projet de vision |
Améliorer la précision de reconnaissance. |
Le choix de l’algorithme de reconnaissance ainsi que la précision du modèle de nuage de points et des points de prise influent sur la précision de la pose. |
Valider la répétabilité de la pose. |
Après avoir configuré le projet de vision, valider la répétabilité des poses produites par le projet de vision. |
|
6. Préhension |
Valider la précision de la préhension au moyen d’essais. |
Avant de déployer le système de vision sur la ligne de production, effectuer des essais pour vérifier la précision de la préhension. |
Ensuite, vous pouvez suivre ces mesures d’amélioration pour améliorer la précision globale de préhension de votre application.