Préhension
L’objectif ultime du déploiement d’une application guidée par vision 3D est d’obtenir une préhension réussie. À cette étape, vous devez construire un flux de travail de préhension par robot afin que le robot puisse saisir les objets avec précision sur la base des résultats de vision.
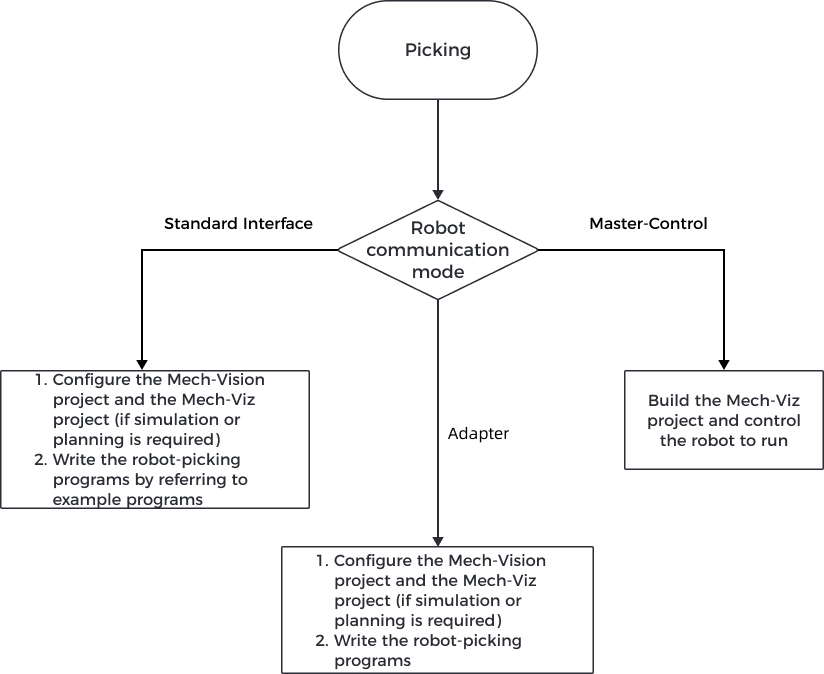
Selon les différents modes de communication du robot sélectionnés, la manière de construire le flux de travail varie également, comme illustré dans la figure ci-dessous.
| Si le projet exige une haute précision de préhension, assurez une bonne précision de préhension de l’application lors du déploiement conformément aux instructions de Sujet : Améliorer la précision de la préhension. |
Construire le flux de travail de préhension dans le mode de communication Standard Interface
Si vous avez choisi d’utiliser le mode de communication Standard Interface, vous devez écrire un programme de préhension côté robot afin que le robot puisse effectuer des tâches de préhension sous la guidance de la vision. Mech-Mind propose des programmes d’exemple Standard Interface pour les robots pris en charge, et vous pouvez vous y référer pour écrire votre programme de préhension du robot.
Lorsque la communication Standard Interface est utilisée, la coopération entre Standard Interface et le système de vision peut être divisée en trois catégories en fonction du projet créé et du résultat émis par le système de vision :
Les sections suivantes présentent en détail les trois types de coopération.
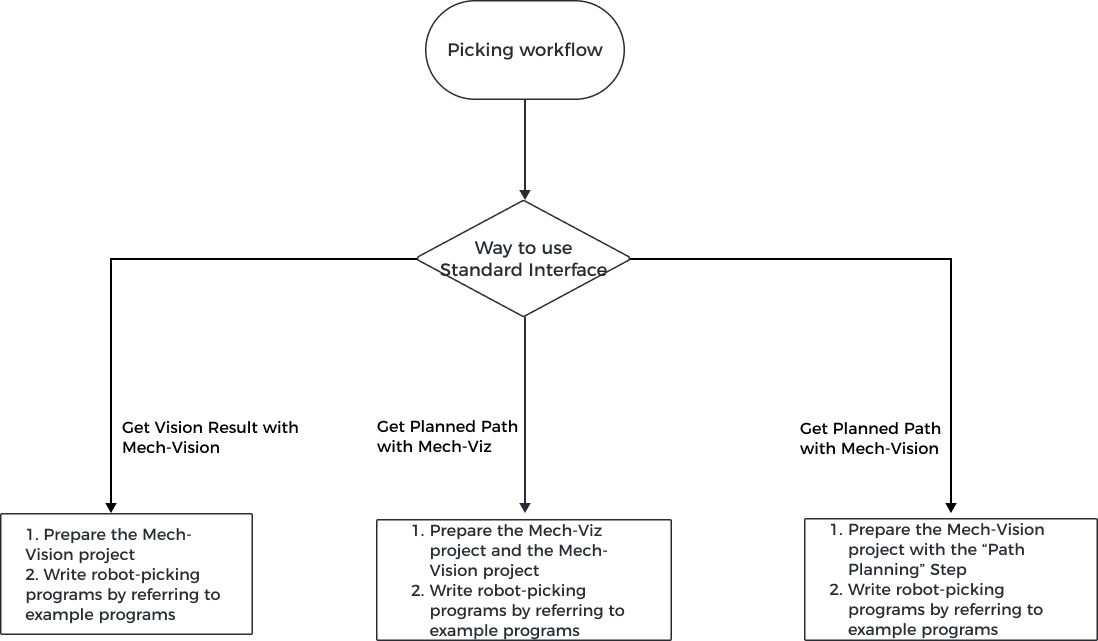
Obtenir le résultat de vision avec Mech-Vision
Ce mode est utilisé lorsque le robot ou le PLC déclenche le projet Mech-Vision et obtient le résultat de vision depuis Mech-Vision via les commandes Standard Interface.
Projet à créer |
Projet Mech-Vision |
|---|---|
Résultat émis par le système de vision |
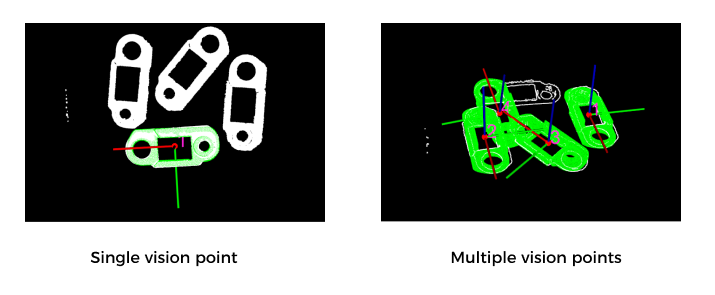
Résultat de vision, pouvant contenir un ou plusieurs points de vision, chacun incluant la pose, des informations sur l’objet cible, etc.
|
| Le résultat de vision est émis par l’étape Sortie du projet Mech-Vision. Notez que le paramètre Type de port de l’étape doit être défini sur Prédéfini (résultat de vision) ou Personnalisé. |
Le flux de travail général de ce mode est le suivant :
-
Le robot ou le PLC déclenche l’exécution du projet Mech-Vision via une commande Standard Interface.
-
Le système de vision exécute le projet Mech-Vision et émet le résultat de vision.
-
Le robot ou le PLC obtient le résultat de vision via une commande Standard Interface.
-
Le robot effectue la préhension sous la guidance du résultat de vision.
Vous devez écrire un programme robot ou PLC pour mettre en œuvre le processus ci-dessus. Mech-Mind fournit de nombreux programmes d’exemple pour les robots ou PLC pris en charge. Parmi ces programmes d’exemple, le premier suit le processus ci-dessus. En outre, vous pouvez vous référer à d’autres programmes d’exemple pour des fonctions étendues. Pour plus d’informations sur l’écriture de programmes robot ou PLC, consultez Communication Standard Interface.
Obtenir la trajectoire planifiée à partir de Mech-Viz
Ce mode est utilisé lorsque le robot ou le PLC déclenche le projet Mech-Viz et obtient la trajectoire planifiée depuis Mech-Viz via les commandes Standard Interface.
Projet à créer |
Projets Mech-Viz et Mech-Vision |
|---|---|
Résultat émis par le système de vision |
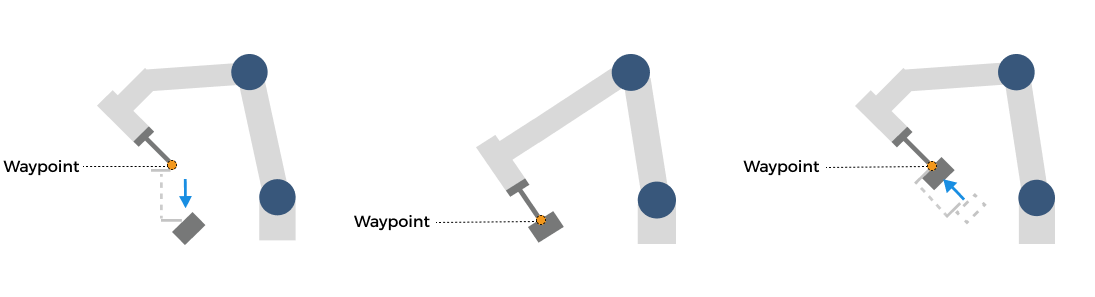
Trajectoire planifiée, composée d’une série de points de passage, chacun contenant des données telles que la pose du robot, des informations sur l’objet cible, le type de mouvement, etc.
|
|
Le flux de travail général de ce mode est le suivant :
-
Le robot ou le PLC déclenche l’exécution du projet Mech-Viz via une commande Standard Interface.
-
Le système de vision exécute le projet Mech-Viz et émet la trajectoire planifiée. Lors de l’exécution du projet Mech-Viz, Mech-Viz appellera le projet Mech-Vision pour obtenir le résultat de vision puis planifiera la trajectoire de mouvement du robot sur la base du résultat de vision.
-
Le robot ou le PLC obtient la trajectoire planifiée via une commande Standard Interface.
-
Le robot effectue la préhension sous la guidance de la trajectoire planifiée.
Vous devez écrire un programme robot ou PLC pour mettre en œuvre le processus ci-dessus. Mech-Mind fournit de nombreux programmes d’exemple pour les robots ou PLC pris en charge. Le deuxième programme d’exemple suit le processus ci-dessus. En outre, vous pouvez vous référer à d’autres programmes d’exemple pour des fonctions étendues. Pour plus d’informations sur l’écriture de programmes robot ou PLC, consultez Communication Standard Interface.
Obtenir la trajectoire planifiée à partir de Mech-Vision
Ce mode est utilisé lorsque le robot ou le PLC déclenche le projet Mech-Vision et obtient la trajectoire planifiée depuis Mech-Vision via les commandes Standard Interface.
Projet à créer |
Projet Mech-Vision |
|---|---|
Résultat émis par le système de vision |
Trajectoire planifiée, composée d’une série de points de passage, chacun contenant des données telles que la pose du robot, des informations sur l’objet cible, le type de mouvement, etc.
|
|
Le flux de travail général de ce mode est le suivant :
-
Le robot ou le PLC déclenche l’exécution du projet Mech-Vision via une commande Standard Interface.
-
Le système de vision exécute le projet Mech-Vision et émet la trajectoire planifiée.
-
Le robot ou le PLC obtient la trajectoire planifiée via une commande Standard Interface.
-
Le robot effectue la préhension sous la guidance de la trajectoire planifiée.
Vous devez écrire un programme robot ou PLC pour mettre en œuvre le processus ci-dessus. Mech-Mind fournit de nombreux programmes d’exemple pour les robots ou PLC pris en charge. Le troisième programme d’exemple suit le processus ci-dessus. En outre, vous pouvez vous référer à d’autres programmes d’exemple pour des fonctions étendues. Pour plus d’informations sur l’écriture de programmes robot ou PLC, consultez Communication Standard Interface.
Construire le flux de travail de préhension dans le mode de communication Master-Control
Si vous avez choisi d’utiliser le mode de communication Master-Control, vous pouvez construire le flux de travail de préhension du robot (c’est-à-dire le projet Mech-Viz) de manière graphique dans Mech-Viz.
Pour plus de détails sur la manière de construire un flux de travail Mech-Viz, veuillez consulter Créer un flux de travail Mech-Viz.