Planification de trajectoire
Fonction
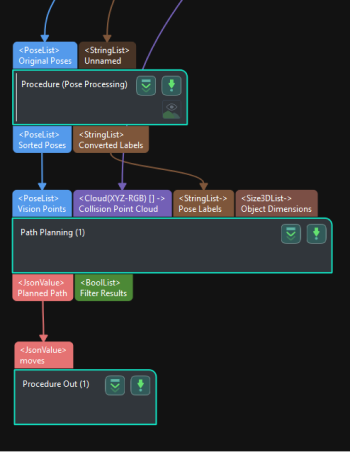
Cette étape utilise les points de vision en entrée pour planifier la trajectoire du robot et produit la trajectoire du robot planifiée avec succès.
|
La fonctionnalité de l’étape Planification de trajectoire est liée à Mech-Viz et nécessite l’installation de Mech-Viz et une licence logicielle pour utiliser l’étape. |
|
Scénario d’utilisation
Cette étape est généralement utilisée dans des projets où l’Interface standard ou l’Adaptateur est utilisé pour la communication, et où seule la trajectoire du robot à proximité du point de vision doit être planifiée. Après avoir construit une scène et fourni les points de vision, cette étape produira une trajectoire de robot sans collision après la détection de collision sur le nuage de points et la planification de trajectoire.
Les étapes précédentes et suivantes courantes de cette étape sont les suivantes :
-
Prédécesseurs : étapes liées à l’ajustement de pose et au traitement de pose.
-
Étapes suivantes : définissez le paramètre « Type de port » dans l’étape « Sortie » sur « Prédéfini (trajectoire du robot) ».
Entrée et sortie
Entrée
-
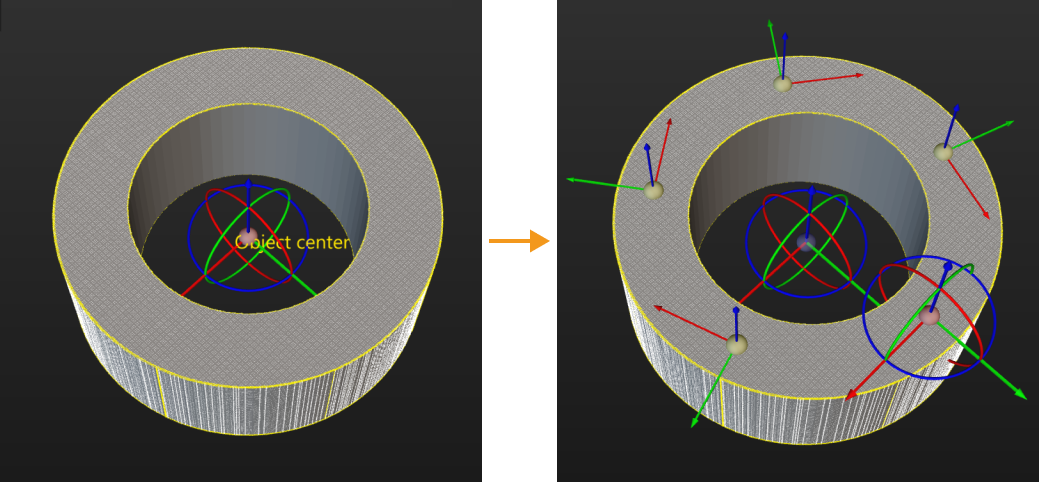
Points de vision : les poses fournies à ce port seront utilisées pour la planification de trajectoire du robot.
-
Nuage de points de collision : les nuages de points fournis à ce port seront utilisés pour la détection de collision avec l’outil.
-
Étiquettes de pose : les étiquettes d’objet correspondant aux points de vision seront fournies à ce port.
-
Dimensions de l’objet : les dimensions de l’objet correspondant aux points de vision seront fournies à ce port.
Les trois ports d’entrée suivants apparaîtront après l’activation des Paramètres de mise à jour des objets de scène.
-
Noms des objets de scène : ce port correspond au nom de l’objet de scène.
-
Dimensions des objets de scène : ce port correspond aux dimensions de l’objet de scène.
-
Poses des objets de scène : ce port correspond à la pose de l’objet de scène.
Sortie
-
Trajectoire planifiée : la trajectoire du robot planifiée avec succès sera produite via ce port.
-
Résultats du filtrage : la liste des points de vision filtrés. True indique que le point de vision correspondant satisfait l’exigence, tandis que False indique que le point de vision ne satisfait pas l’exigence.
Description des paramètres
Paramètres de planification de trajectoire
- Configuration du workflow
-
Description : Ouvrez l’outil de planification de trajectoire et sélectionnez le workflow configuré dans la liste déroulante.
- Mise à jour de l’objet de scène
-
Lorsque cette option est activée, les ports d’entrée Noms des objets de scène, Dimensions des objets de scène et Poses des objets de scène seront ajoutés pour mettre à jour les poses et les dimensions des objets de scène tels que le bac.
Scénario d’utilisation
- Sélectionner le scénario
-
Description: Sélectionnez le scénario d’utilisation de la solution actuelle.
Liste de valeurs: Appariement (Alimentation machine/Positionnement/Assemblage), Dépalettisation, Autres
Scénario Description Guide rapide de reconnaissance de l’objet cible Appariement (Alimentation machine/Positionnement/Assemblage)
Adapté aux scénarios où des objets cibles sont créés dans l’éditeur d’objets cibles et où les poses des objets cibles sont obtenues par appariement avec le modèle de nuage de points. Par exemple, les applications d’alimentation de machine, de positionnement et d’assemblage.
Reconnaissance d’objet cible dans des scénarios d’alimentation de machine
Dépalettisation
Adapté aux scénarios de dépalettisation. Les poses des objets cibles peuvent être obtenues par apprentissage profond ou d’autres méthodes, sans appariement avec le modèle de nuage de points.
Reconnaissance d’objet cible dans des scénarios de dépalettisation
Autres
Adapté à la préhension dans d’autres scénarios, tels que la prise d’objets polyvalents en supermarché et la prise en caisse.
Valeur par défaut: Appariement (Alimentation machine/Positionnement/Assemblage)
- Méthode de conversion des données
-
Description: En sélectionnant la méthode de conversion du résultat, cette Étape convertit le résultat de reconnaissance en type de données nécessaire à la préhension.
Liste de valeurs: Générer une stratégie de préhension basée sur le point central de l’objet, Générer une stratégie de préhension basée sur des points de préhension
-
Générer une stratégie de préhension basée sur le point central de l’objet: Convient aux objets cibles symétriques, nécessitant un ajustement d’orientation du point central de l’objet. Une fois cette option sélectionnée, vous devez fournir le point central de l’objet à l’Étape « Sortie », qui convertira automatiquement le point central de l’objet en point de préhension correspondant.
-
Générer une stratégie de préhension basée sur des points de préhension: Convient aux objets cibles disposant de plusieurs points de préhension devant être filtrés. Une fois cette option sélectionnée, vous devez fournir le point de préhension et les informations du point de préhension à l’Étape « Sortie ».
Valeur par défaut: Générer une stratégie de préhension basée sur le point central de l’objet
-
- Objet cible sans modèle de nuage de points
-
Description: Sélectionnez un objet cible qui ne nécessite pas de modèle de nuage de points, et cette Étape peut émettre les informations de point de préhension de l’objet cible. Veuillez régler ce paramètre lorsque le scénario d’utilisation est « Dépalettisation » ou « Autres ».
Paramètres de détection de collision
- Type de nuage de points
-
Description : ce paramètre est utilisé pour sélectionner le type de nuage de points fourni à l’outil de planification de trajectoire.
Liste des valeurs : CloudXYZRGB (nuage de points coloré), CloudXYZ (nuage de points) et CloudXYZNormal (nuage de points avec normales)
Paramètre par défaut : CloudXYZRGB
- Nuage de points dans le repère de la caméra
-
Description : veuillez sélectionner ce paramètre lorsque le nuage de points est dans le repère de la caméra. Une fois cette option sélectionnée, le nuage de points sera converti dans le repère du robot et envoyé à l’outil de planification de trajectoire. Si cette option n’est pas sélectionnée, le nuage de points sera envoyé directement à l’outil de planification de trajectoire.
Paramètre par défaut : sélectionné.
- Supprimer le nuage de points de forme irrégulière
-
Description: Une fois cette option activée, tout nuage de points chevauchant le modèle de collision de l’objet cible ayant une forme 3D non standard sera supprimé par Mech-Vision afin d’éviter les interférences dans la détection de collision. Veuillez régler ce paramètre lorsque le scénario d’utilisation est « Appariement (Alimentation machine/Positionnement/Assemblage) ».
Paramètre par défaut: Non sélectionné
Instruction: Si vous devez détecter les collisions sur les objets cibles tout au long du processus, de la prise à la dépose, veuillez sélectionner ce paramètre et vous assurer que le modèle de collision est configuré pour l’objet cible. Veuillez noter que ce paramètre est invalide pour les objets cibles générés avec des formes 3D courantes dans l’éditeur d’objets cibles.
- Rayon de recherche du nuage de points de l’objet cible
-
Description: En prenant n’importe quel point du nuage de points de l’objet cible comme centre, le nuage de points à l’intérieur du rayon de recherche sera supprimé. Veuillez régler ce paramètre lorsque Supprimer le nuage de points de forme irrégulière est sélectionné.
Valeur par défaut: 3 mm
Autres paramètres d’entrée
- Autres entrées
-
Description: Une fois cette option sélectionnée, de nouveaux ports d’entrée « Étiquettes des points de préhension », « Dimensions de l’objet cible » et « Décalages du point de préhension » seront ajoutés à l’Étape.
Paramètre par défaut: Non sélectionné
Instruction: Une fois ce paramètre sélectionné, veuillez vous assurer que les nouveaux ports d’entrée ajoutés reçoivent des données. Sinon, l’Étape « Sortie » échouera.