Déplacement par vision
Fonction
Cette étape planifie la trajectoire et la pose du robot pour prélever l’objet cible sur la base du résultat de vision renvoyé par le service de vision.
| Port de sortie | Description |
|---|---|
Réussite |
La trajectoire a été planifiée avec succès. |
Échec de planification |
La planification de la trajectoire a échoué. |
Autres échecs |
Aucune pose disponible pour la planification. Causes possibles : Mech-Vision n’a pas fourni de poses. Les poses fournies par Mech-Vision ne répondent pas aux exigences. |
Scénario d’utilisation
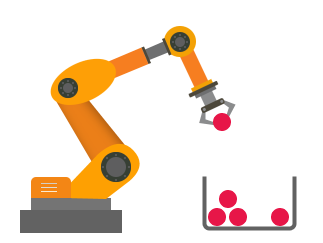
Selon les scénarios d’utilisation réels et les types d’outils, les méthodes de préhension se subdivisent en Préhension standard, Dépalettisation de cartons et Préhension avec matrice.
Veuillez sélectionner la méthode de préhension en fonction de la situation réelle. En outre, les paramètres de chaque méthode de préhension sont différents. Voir le tableau ci-dessous pour plus d’informations.
Méthode de préhension |
Description |
Illustration |
|
Les objets à prélever sont des pièces industrielles, des colis de livraison, etc.
|
|
||
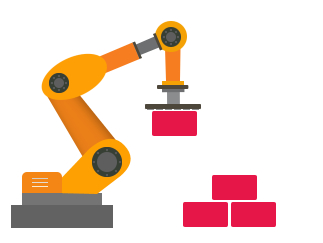
Dépalettisation de cartons |
Les objets à prélever sont des cartons, des bacs de manutention ou des sacs, et un seul objet sera prélevé à la fois.
|
|
|
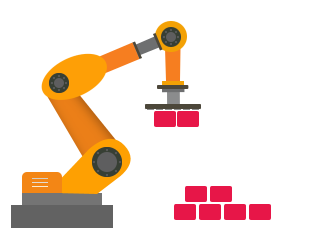
Les objets à prélever sont des cartons, des bacs de manutention ou des sacs, et plusieurs objets peuvent être prélevés simultanément.
|
|
||
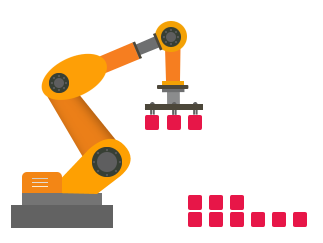
L’outil du robot possède plusieurs embouts et chaque embout prélève spécifiquement un objet cible. À l’heure actuelle, cette méthode ne prend en charge que des embouts multiples disposés sur une seule rangée. |
|
||