Filtre de points
Fonction
Cette Étape peut filtrer des points d’un nuage de points selon des règles définies par l’utilisateur. Les points qui ne respectent pas les règles seront exclus.

Scénario d’utilisation
Cette Étape est généralement utilisée lors de la phase de prétraitement du nuage de points. Elle aide à supprimer les points aberrants et indésirables afin de préparer les opérations de regroupement ultérieures.
Description des paramètres
Cette Étape offre deux méthodes pour filtrer les points dans le nuage de points:
-
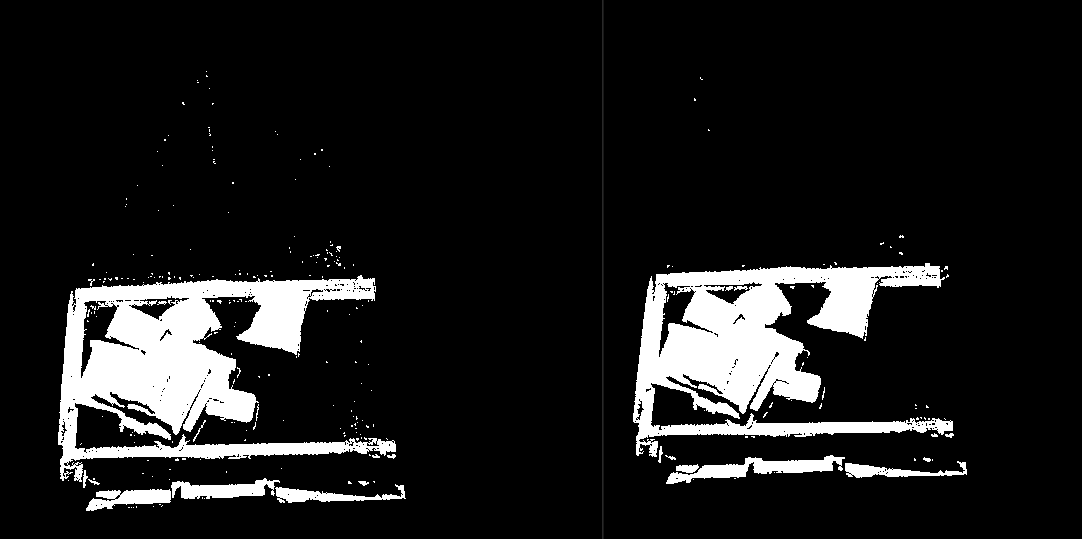
Filtre statistique des aberrants: Un filtre statistique qui supprime les points hors plage selon les paramètres donnés. Cette méthode est recommandée lorsque le nuage de points présente des aberrants évidents, comme illustré ci-dessous.
-
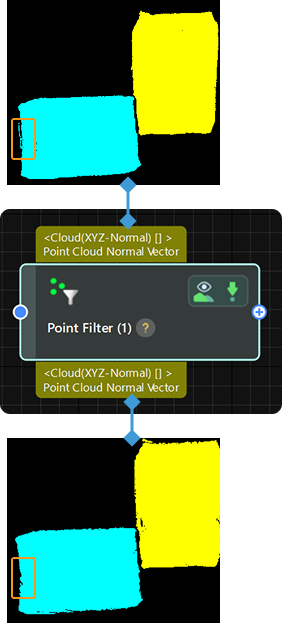
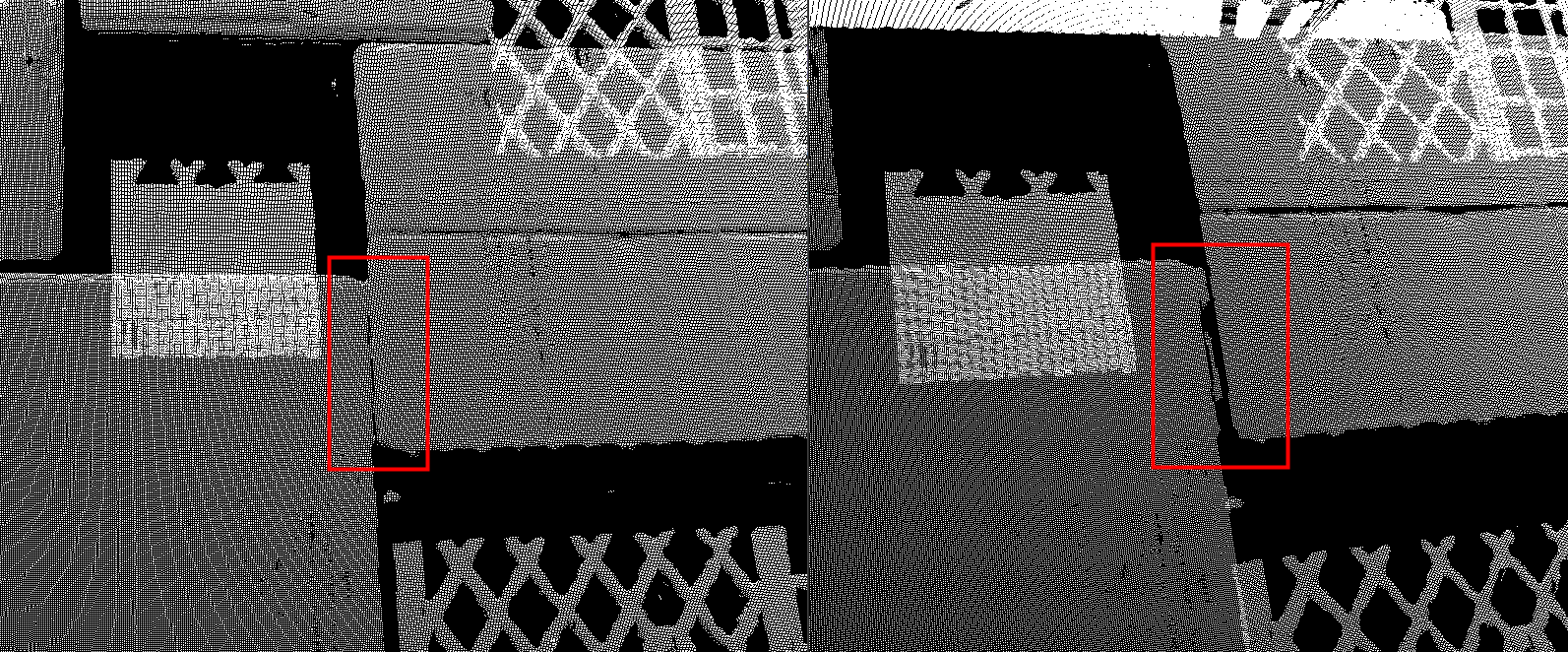
Filtre de normales: Un filtre de normales qui calcule l’angle entre la normale de chaque point du nuage de points et la direction de référence. Les points hors plage seront filtrés. Il est recommandé lorsque les nuages de points doivent être stratifiés pour éviter l’agglutination, comme indiqué dans le cadre rouge ci-dessous.
Les sections suivantes présentent les paramètres de chaque méthode.
Filtre statistique des aberrants
- K moyen
-
Description: Ce paramètre spécifie le nombre de points voisins pour chaque recherche. Une valeur plus grande augmente le nombre de voisins utilisés pour calculer la distance moyenne, ce qui renforce le filtrage mais augmente le risque de supprimer des détails fins du nuage de points. Une valeur plus petite peut conduire à un filtrage insuffisant.
Valeur par défaut: 30
Recommandation de réglage: Il est recommandé d’utiliser la valeur par défaut.
- Multiplicateur d’écart-type
-
Description: Ce paramètre spécifie le seuil de détermination des aberrants. Une valeur plus petite impose des seuils de filtrage plus stricts, entraînant la suppression d’un plus grand nombre de points. Une valeur plus grande applique des conditions plus souples, permettant de conserver davantage de points.
Valeur par défaut: 2.0000
Recommandation de réglage: Il est recommandé d’utiliser la valeur par défaut.
|
Si les points du nuage de points sont denses, il est recommandé d’augmenter la valeur de K moyen. Si les points du nuage de points sont clairsemés, il est recommandé de diminuer la valeur de K moyen. Si trop de points valides sont supprimés, il est recommandé d’augmenter la valeur du Multiplicateur d’écart-type. |
Filtre de normales
Paramètres de la direction de référence
- Utiliser l’axe Z du robot dans la caméra
-
Instruction: Ce paramètre détermine s’il faut utiliser l’axe Z du robot dans la caméra comme direction de référence. S’il est sélectionné, les valeurs Aligner X, Aligner Y et Aligner Z sont invalides.
Valeur par défaut: non sélectionné.
- Valeurs Aligner X/Y/Z
-
Instruction: Ce paramètre est utilisé pour déterminer l’axe de référence du filtrage par normales. Un vecteur composé des paramètres X, Y et Z définit la direction de l’axe de référence. Lorsque Utiliser l’axe Z du robot dans la caméra est sélectionné, les trois paramètres sont invalides et l’axe de référence est l’axe Z du robot.
Valeur par défaut: 0.0000/0.0000/-1.0000
Paramètres de seuil d’angle
- Angle min
-
Description: Ce paramètre est utilisé pour contrôler la limite inférieure de la différence angulaire en degrés (°) lors du processus de filtrage des points. Lorsque la différence angulaire entre le vecteur normal d’un point et la direction de référence est inférieure à ce seuil, le point sera éliminé.
Valeur par défaut: 0°
- Angle max
-
Description: Ce paramètre est utilisé pour contrôler la limite supérieure de la différence angulaire en degrés (°) lors du processus de filtrage des points. Lorsque la différence angulaire entre le vecteur normal d’un point et la direction de référence dépasse ce seuil, le point sera éliminé.
Valeur par défaut: 90°