Interface utilisateur
Fichier
Après l’ouverture de Mech-Viz, la page Fichier s’affiche.
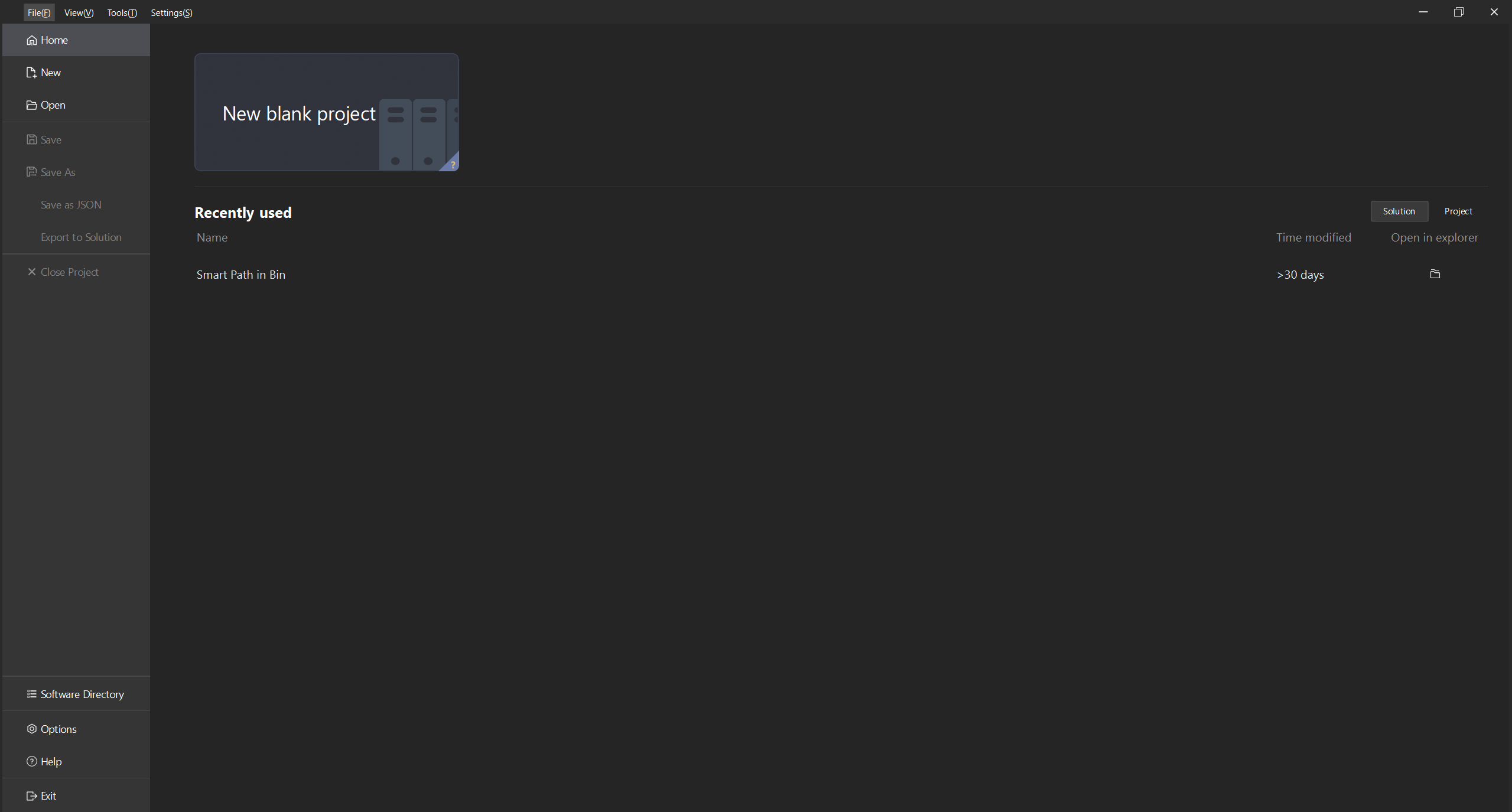
Cette interface se compose des parties suivantes :
Option |
Description |
Raccourci |
|
Accueil |
Créer un nouveau projet vierge. |
Ctrl + N |
|
Récemment utilisés |
Ouvrir un projet récemment utilisé. |
Aucun |
|
Nouveau |
Créer un nouveau projet vierge. |
Ctrl + N |
|
Projets d’exemple |
Projets d’exemple intégrés. Veuillez vous référer à Projets d’exemple pour savoir comment les utiliser. |
Aucun |
|
Ouvrir |
Sélectionner un dossier de projet et l’ouvrir. |
Ctrl + O |
|
Enregistrer |
Enregistrer les modifications du projet en cours. |
Ctrl + S |
|
Enregistrer sous |
Enregistrer le projet dans un répertoire spécifié. |
Ctrl + Shift + S |
|
Enregistrer au format JSON |
Enregistrer le projet, et enregistrer le fichier VIZ dans le dossier du projet en tant que fichier JSON. |
Aucun |
|
Exporter vers une solution |
Exporter le projet en cours vers une solution. Pour plus d’informations, veuillez vous référer à Projet et solution. |
Aucun |
|
Fermer la solution |
Fermer la solution en cours. |
Ctrl + W |
|
Dossier du logiciel |
Ouvrir le dossier où le logiciel est installé. |
Aucun |
|
Options |
Ouvrir la fenêtre Options. |
Aucun |
|
Aide |
Afficher le support logiciel, les informations de version, les notes de publication et le manuel utilisateur. |
Aucun |
|
Quitter |
Fermer Mech-Viz. |
Ctrl + Q |
|
|
Interface d’accueil du logiciel
Après avoir créé un nouveau projet vierge, sélectionnez un modèle de robot dans la fenêtre contextuelle « Bibliothèque de modèles de robots », puis entrez dans l’interface d’accueil du logiciel.
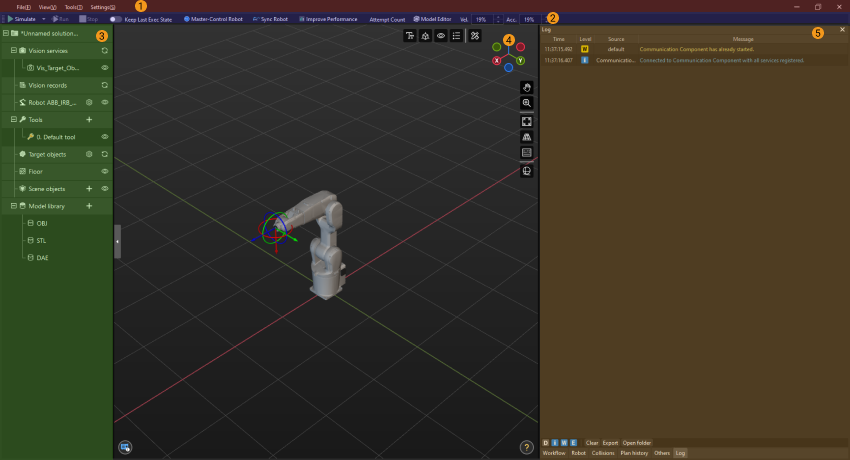
L’interface principale se compose de 5 sections principales, comme indiqué dans le tableau ci-dessous.
1 |
Barre de menus |
Inclut Fichier, Vue, Outils, Paramètres.
|
2 |
Barre d’outils |
Permet de simuler le projet, de contrôler le robot réel, d’ajuster la vitesse du robot, etc.
|
3 |
Arborescence des ressources du projet |
Permet de gérer les ressources du projet, y compris les outils, les objets cibles, les objets de scène, etc.
|
4 |
Zone de simulation 3D |
La zone où le trajet de mouvement du robot, le résultat de la détection de collisions, la pose de vision, le nuage de points, etc. sont affichés lorsque le projet est en cours d’exécution ou de simulation.
|
5 |
Panneau fonctionnel |
La zone comprend Workflow, Robot, Collisions, Historique de planification, Journal et Autres, couvrant les fonctionnalités de configuration essentielles nécessaires à un projet.
|