Principes fondamentaux
Solution et projet
Une solution est un ensemble de configurations et de données relatives à la communication avec le robot, au traitement de vision, à la planification de trajectoire et à d’autres fonctions, qui sont toutes des composants essentiels d’une application de vision.
Sur la base des données d’image capturées sur site, un projet Mech-Vision effectue une série de traitements de vision et produit les résultats de vision.
Les projets Mech-Viz désignent les projets de planification de trajectoire du robot créés dans Mech-Viz. Ils peuvent utiliser le résultat de vision de Mech-Vision pour générer dynamiquement des trajectoires de mouvement du robot sans collision.
Les projets Mech-Vision se combinent avec les projets Mech-Viz pour constituer des solutions d’orientation 3D de robot. Une solution peut contenir plusieurs projets Mech-Vision, mais au plus un projet Mech-Viz.
À partir de Mech-Viz 2.0.0, le projet Mech-Viz doit appartenir à une solution et ne peut pas être utilisé séparément. Veuillez vous reporter à Projet et solution pour en savoir plus sur leurs opérations.
| « Projets » mentionnés dans le manuel utilisateur de Mech-Viz se réfèrent aux projets Mech-Viz, sauf indication contraire. |
Ressources du projet
Les ressources du projet désignent diverses ressources fondamentales utilisées dans le projet, notamment le robot, les outils, les objets cibles et les objets de scène.
Robot |
Dans Mech-Viz, les robots désignent des bras robotiques multi-articulés ou des robots portiques à usage industriel. |
Outils |
Les outils, tels que les pinces et les ventouses, sont des dispositifs mécaniques spécialement conçus qui sont fixés à la bride du robot pour effectuer diverses tâches. |
Objets cibles |
Les objets cibles désignent les objets sur lesquels l’outil réalise des tâches, tels que des cartons, des pièces métalliques, des pièces à coller ou à souder, etc. |
Objets de scène |
Les objets de scène, comprenant généralement la clôture de sécurité, le bac de picking, le plateau, la caméra, le cadre de montage de la caméra, etc., désignent les objets présents dans les scénarios réels où le robot réalise diverses tâches. |
Pose
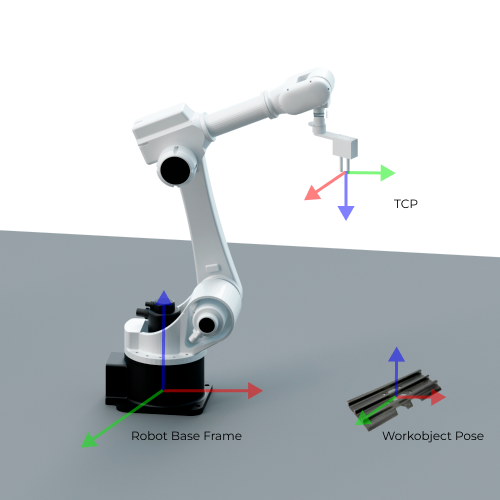
TCP (Point central de l’outil)
Le TCP est la pose d’un point spécifique sur l’outil ou à l’extérieur de l’outil par rapport à la bride à l’extrémité du robot.
Afin de réaliser des tâches telles que le picking, nous disons généralement que le robot doit se déplacer vers un point spécifique dans l’espace, ce qui signifie en réalité que son TCP doit se déplacer vers ce point.
Pose de l’objet cible
La pose de l’objet cible est la pose d’un certain point de l’objet cible par rapport au repère de base du robot. Lors du placement de l’objet cible, nous faisons généralement coïncider sa pose avec une pose cible donnée.
Point de préhension (objet cible)
Il peut y avoir plusieurs points de préhension différents sur un même objet cible, fournis par Mech-Vision. Lors de la préhension de l’objet cible, le robot déplace son TCP à l’emplacement du point de préhension de sorte que les origines et les axes X de ces deux points coïncident, tandis que les directions de leurs axes Y et Z sont opposées.
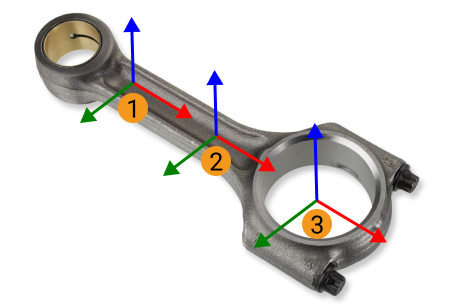
Parmi eux, ① et ② sont des points de préhension d’arbres, tandis que ③ est le point de préhension du centre d’un anneau.
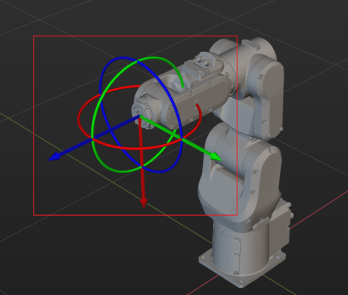
Pose du robot
La pose du robot fait généralement référence à la position et à l’orientation du robot dans l’espace 3D. Elle s’exprime sous forme de pose d’outil ou de positions articulaires.
Pose de l’outil
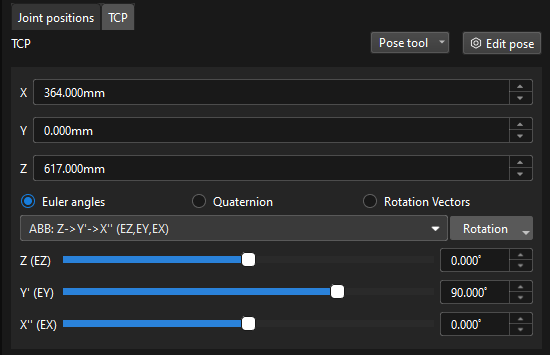
La pose de l’outil désigne la pose du repère de l’outil par rapport au repère du robot.
La pose de l’outil détermine la position (x, y, z) et l’orientation (généralement représentée par des angles d’Euler, une matrice de rotation et des quaternions) de l’outil. Elle met l’accent sur la relation de position entre l’outil et l’espace de travail et décrit la position et l’orientation de l’outil, telles que la pince robotique et la torche de soudage, lorsque le robot exécute une tâche.
-
Angles d’Euler
Les angles d’Euler sont utilisés pour décrire la rotation de l’objet dans l’espace 3D.
Les angles d’Euler se composent de trois angles correspondant à la rotation de chacun des trois axes. Ces trois axes tournent généralement autour des axes X, Y et Z du repère fixe de l’objet, respectivement. La même orientation peut être exprimée de différentes manières à l’aide de multiples jeux d’angles d’Euler. Pour éviter toute ambiguïté, une définition cohérente des angles d’Euler est appliquée aux robots de différentes marques. Pour plus d’informations sur les conventions et les représentations des angles d’Euler, veuillez vous reporter à Angles d’Euler.


-
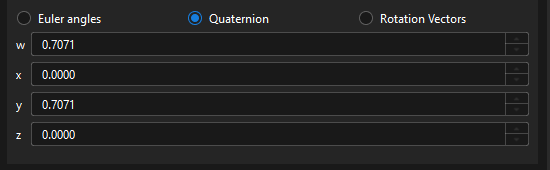
Quaternions
Pour éviter le problème de verrouillage de cardan associé à l’utilisation des angles d’Euler, certains fabricants de robots utilisent des quaternions pour représenter les orientations dans l’espace. Un quaternion consiste grossièrement à utiliser trois nombres pour définir l’axe de rotation spatial et un quatrième nombre pour définir l’angle de rotation. Le repère de l’outil peut atteindre la pose cible depuis son état initial en tournant d’un angle autour de l’axe de rotation spatial.
-
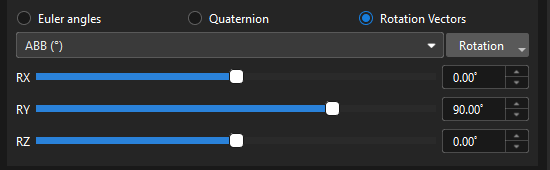
Vecteur de rotation
Le vecteur de rotation, également appelé angle axial, est utilisé pour décrire l’état de rotation de l’outil.
Actuellement, il n’est utilisé que par les robots UR.
Positions articulaires
Les positions articulaires correspondent aux angles de rotation de chaque joint du robot par rapport à sa position initiale ou de référence. Cette description peut représenter l’état de chaque joint en adéquation avec la structure matérielle du robot.
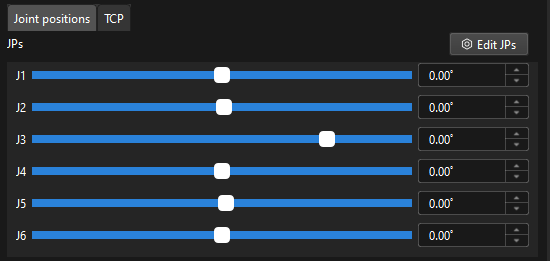
Les positions articulaires sont mappées à la pose de l’outil par un calcul de cinématique directe, tandis que la pose de l’outil est mappée aux positions articulaires par un calcul de cinématique inverse.
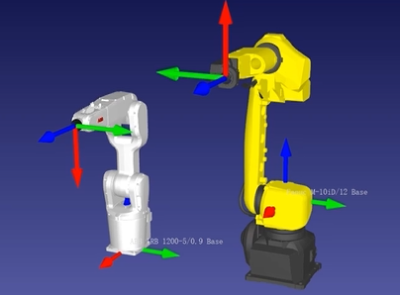
Pose de la bride
La pose de la bride est la pose du repère de bride du robot par rapport au repère de référence du robot, dont la représentation est la même que celle de la pose de l’outil. Elle peut être considérée comme une pose d’outil particulière où le TCP est au centre de la bride sans aucune rotation.
L’orientation par défaut du repère de bride définie par chaque fabricant de robots est différente, ce qui entraîne des angles par défaut différents pour la pose de la bride. Par exemple, l’orientation par défaut de l’axe X pour les robots ABB est vers le bas, tandis que pour les robots FANUC elle est vers le haut. De plus, la plupart des robots ont une pose de bride avec l’axe Z perpendiculaire à la surface de la bride et orienté vers l’extérieur, mais pour les robots TURIN, c’est l’axe X qui est perpendiculaire à la surface de la bride et orienté vers l’extérieur.
Type de mouvement
Le mouvement du robot désigne généralement le processus de déplacement du point central de l’outil du robot (TCP) du point A au point B dans l’espace. Le mouvement articulé et le mouvement linéaire sont deux méthodes fondamentales de mouvement du robot.
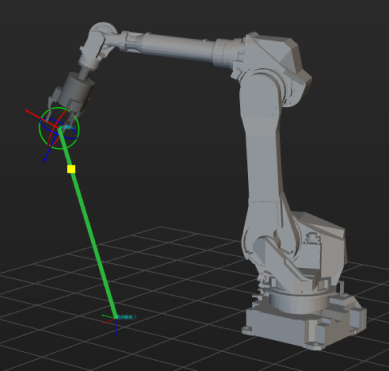
Mouvement articulé
Le mouvement articulé est le mouvement d’un robot obtenu en ajustant l’angle ou la position de chaque articulation. Chaque articulation peut tourner ou se déplacer pour amener l’outil du robot à une position attendue.
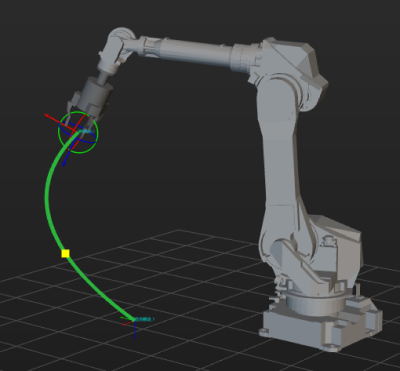
Mouvement linéaire
Le mouvement linéaire est le mouvement de l’outil du robot sur une trajectoire linéaire. Contrairement au mouvement articulé, le mouvement linéaire est obtenu en déplaçant l’outil du robot le long d’une trajectoire rectiligne.
Symétrie de rotation de l’objet cible
Un objet cible présentant une symétrie de rotation coïncide avec lui-même après une rotation autour de son axe de symétrie.
Veuillez vous reporter à Symétrie de rotation pour une description détaillée.
Symétrie de rotation de l’outil
Un outil présentant une symétrie de rotation coïncide avec lui-même après une rotation autour de son axe de symétrie.
Veuillez vous reporter à Symétrie de rotation de l’outil pour une description détaillée.
Relaxation translationnelle
Lors de la préhension de certains objets cibles, la pose de prise de l’outil peut être translatée le long de l’axe X ou de l’axe Y du point de préhension; c’est ce que l’on appelle la relaxation translationnelle.
Veuillez vous reporter à Relaxation translationnelle pour plus d’informations.
Relaxation rotationnelle
Lorsque le robot saisit certains objets cibles, la pose de prise du robot peut être tournée de manière flexible dans une plage d’angles spécifique; c’est ce que l’on appelle la relaxation rotationnelle.
Veuillez vous reporter à Relaxation rotationnelle pour plus d’informations.
Communication Maître-Contrôle
La communication Maître-Contrôle permet au système de vision de contrôler le robot pour exécuter des tâches. Dans ce cas, le système de vision agit en tant que contrôleur et le robot en tant que partie contrôlée. Plus précisément, dans la communication Maître-Contrôle, le système de vision envoie des commandes au robot et le robot écoute, reçoit, puis exécute les commandes. Pour plus d’informations sur les modes de communication, reportez-vous à la section Modes de communication.
Planification de trajectoire
Calcule la trajectoire de mouvement optimale du robot du point de départ au point cible, garantissant la génération d’une trajectoire sûre, efficace et sans collision.
Simulation
Simule le robot et son processus d’exploitation dans un environnement virtuel. Grâce à la simulation du mouvement du robot et des interactions avec l’environnement, etc., dans le logiciel, nous pouvons vérifier les trajectoires de mouvement, optimiser la planification de trajectoire et prédire les risques de collision. Le processus de simulation n’a pas besoin de faire fonctionner un robot réel.
Détection de collision
Pendant les processus de simulation et de planification de trajectoire, la détection de collision peut reconnaître les collisions potentielles survenant entre le robot et d’autres objets dans l’environnement de travail (y compris les objets de scène, les objets cibles et le robot, etc.), afin d’optimiser la trajectoire et d’assurer des opérations sûres.
Modèle de robot
Modèles numériques créés selon les paramètres du robot réel (tels que dimensions, structures articulaires et caractéristiques cinématiques) pour la simulation et la planification de trajectoire.