Vérifier la répétabilité des poses à l’aide de statistiques
Fonction
Cette Étape est utilisée pour évaluer la stabilité des poses dans les projets de vision.
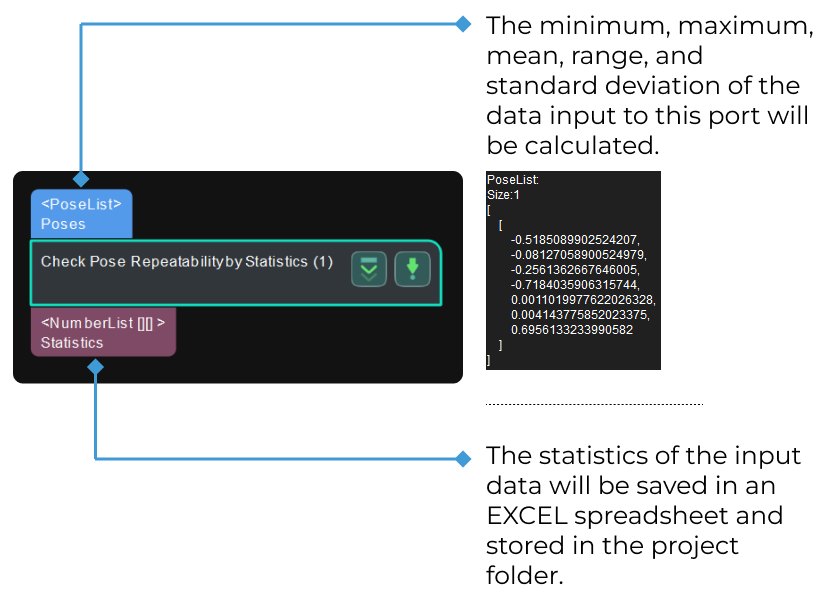
Dans l’application réelle, la caméra capture d’abord 10–20 images du même objet cible à chaque position, et cette Étape calcule le minimum, le maximum, la moyenne, l’étendue et l’écart type des poses de l’objet cible à chaque position, puis vous pouvez déterminer si le projet fonctionne de manière stable d’après les statistiques.
|
Quel que soit le mode de montage de la caméra, Eye-in-Hand ou Eye-to-Hand, des images de l’objet cible à différentes positions doivent être capturées afin de vérifier la stabilité de la pose aux différentes positions. Toutefois, lorsque la caméra capture 10–20 images à la même position, la position relative entre la caméra et l’objet cible ne doit pas changer.
|
Scénario d’utilisation
Cette Étape peut être utilisée pour évaluer la robustesse de la caméra ou vérifier l’efficacité du réglage des paramètres du projet de vision.
Elle peut suivre des Étapes d’appariement 3D pour évaluer la robustesse de l’appariement. Vous pouvez aussi la placer avant l’Étape Sortie dans un projet afin de vérifier la stabilité du positionnement et de l’écart de reconnaissance. Dans ce dernier cas, veuillez garder les objets cibles immobiles puis capturer des images.
Après l’exécution du projet, cette Étape exporte la feuille de calcul des statistiques dans un répertoire spécifié. Vous pouvez consulter dans ce fichier les statistiques des valeurs X, Y, Z des poses et des valeurs X, Y, Z des angles d’Euler.
|
La convention des angles d’Euler dans le fichier est X→Y→Z. |
Description des paramètres
Données pour établir les statistiques
- Type de données d’entrée
-
Description : Ce paramètre permet de sélectionner le type de données d’entrée correspondant au port d’entrée.
Liste de valeurs : PoseListInput, NumberListInput.
-
PoseListInput : Entrer une ou plusieurs listes de poses.
-
NumberListInput : Entrer d’autres données.
Valeur par défaut : PoseListInput
Recommandation de réglage : Veuillez sélectionner le type de données d’entrée selon les besoins réels. Veuillez consulter l’exemple de réglage pour le résultat correspondant.
-
- Type de données de sortie
-
Description : Ce paramètre spécifie le type de données de sortie.
Valeur par défaut : Statistiques des positions spatiales et des angles d’Euler.
Recommandation de réglage : Ce paramètre ne nécessite aucun ajustement. Veuillez conserver le réglage par défaut.
- Plage de déviation des coordonnées de position (0–1000)
-
Description : Ce paramètre spécifie la limite supérieure acceptable de la déviation des coordonnées de position, en mm. Si la différence entre le maximum et le minimum dépasse ce seuil, une erreur peut être signalée selon le réglage du paramètre Gestion des valeurs aberrantes. Cette vérification est effectuée indépendamment pour les coordonnées X, Y et Z.
Plage de valeurs : 0–1000
Valeur par défaut : 1,0 mm
Instruction de réglage : Veuillez définir la valeur selon les besoins réels. Veuillez consulter l’exemple de réglage pour le résultat correspondant.
- Plage de déviation des angles d’Euler (0–360)
-
Description : Ce paramètre spécifie la limite supérieure acceptable de la déviation des angles d’Euler, en °. Si la différence entre le maximum et le minimum dépasse ce seuil, une erreur peut être signalée selon le réglage du paramètre Gestion des valeurs aberrantes. Cette vérification est effectuée indépendamment pour les valeurs α, β et γ.
Plage de valeurs : 0–360
Valeur par défaut : 0,100°
Instruction de réglage : Veuillez définir la valeur selon les besoins réels. Veuillez consulter l’exemple de réglage pour le résultat correspondant.
Enregistrement des statistiques
- Redémarrer
-
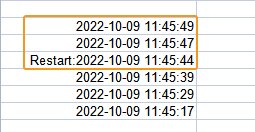
Description : Lorsque la position de l’objet cible change ou que des valeurs aberrantes apparaissent dans les statistiques, ce paramètre permet de déterminer s’il faut recommencer la collecte des statistiques. Une fois cette option sélectionnée, les données de sortie seront marquées « Restart ». Dans le fichier de statistiques, les données collectées avant la marque « Restart » seront exclues des statistiques et affichées en gris.
Valeur par défaut : non sélectionné.
Recommandation de réglage : Si vous souhaitez recommencer la collecte des statistiques, sélectionnez cette option. Veuillez consulter l’exemple de réglage pour le résultat correspondant.
-
Après l’exécution réussie de l’Étape à nouveau, cette option sera automatiquement réinitialisée à non sélectionné.
-
Si cette option n’est pas sélectionnée, la valeur aberrante restera dans les statistiques enregistrées.
-
- Gestion des valeurs aberrantes
-
Description : Ce paramètre permet de préciser la manière de traiter les valeurs aberrantes lorsqu’elles apparaissent dans les statistiques.
Liste de valeurs : Raise Error on Outlier, Record and Mark Outlier.
-
Raise Error on Outlier : Une erreur sera immédiatement signalée lorsqu’une valeur aberrante est détectée et celle-ci ne sera pas enregistrée. Les trois causes possibles de l’erreur sont les suivantes.
-
Le nombre d’éléments dans les données est incohérent. Dans ce cas, vous pouvez essayer d’utiliser l’Étape Décompresser les données pour résoudre le problème.
-
La déviation des coordonnées de position ou la déviation des angles d’Euler dépasse le seuil défini. Dans ce cas, vous pouvez essayer d’ajuster les paramètres Plage de déviation des coordonnées de position et Plage de déviation des angles d’Euler.
-
Le fichier de statistiques a été ouvert et les nouvelles données ne peuvent pas être enregistrées. Dans ce cas, veuillez fermer le fichier de statistiques et relancer le projet.
-
-
Record and Mark Outlier : Aucune erreur ne sera signalée si une valeur aberrante se produit. La valeur aberrante sera enregistrée dans le fichier et marquée en rouge, et elle sera également incluse dans les statistiques.
Valeur par défaut : Raise Error on Outlier.
Instruction de réglage : Veuillez définir la valeur selon les besoins réels. Veuillez consulter l’exemple de réglage pour le résultat correspondant.
-
- Nombre de décimales
-
Description : Ce paramètre spécifie le nombre de décimales utilisé pour les statistiques. Par exemple, lorsque ce paramètre est défini sur 2, cette Étape arrondit la valeur statistique calculée à deux décimales.
Valeur par défaut : 3
Plage de valeurs : 0–8
Instruction de réglage : Veuillez définir la valeur selon les besoins réels.
- Afficher l’étendue en valeurs positives et négatives
-
Description : Une fois ce paramètre sélectionné, l’étendue dans le fichier de statistiques sera exprimée en valeurs positives et négatives. Par exemple, si l’étendue est de 200, elle sera affichée ±100 après la sélection de ce paramètre.
Réglage par défaut : Non sélectionné
Instruction de réglage : Veuillez définir la valeur selon les besoins réels.
- Nom de base du fichier
-
Description : Ce paramètre permet de définir le nom du fichier de statistiques. Si vous ne nommez pas le fichier, le fichier de sortie sera nommé « posesStatistics » par défaut. Si vous modifiez le nom de base du fichier, le paramètre Redémarrer sera automatiquement sélectionné et les statistiques seront recollectées.
Réglage par défaut : aucun.
Instruction de réglage : Veuillez définir la valeur selon les besoins réels.
Si la position de l’objet cible change, ou si des valeurs aberrantes apparaissent dans les statistiques, vous pouvez sélectionner Redémarrer et réinitialiser le Nom de base du fichier pour recréer un fichier de statistiques afin d’enregistrer les données.
- Chemin du répertoire d’enregistrement
-
Description : Ce paramètre spécifie le répertoire d’enregistrement du fichier de statistiques. Si vous ne sélectionnez pas de répertoire d’enregistrement, le fichier de statistiques sera enregistré par défaut dans le dossier du projet.
Réglage par défaut : aucun.
Recommandation de réglage : Cliquez sur le bouton
 pour choisir un répertoire d’enregistrement.
pour choisir un répertoire d’enregistrement.
Exemples de réglage
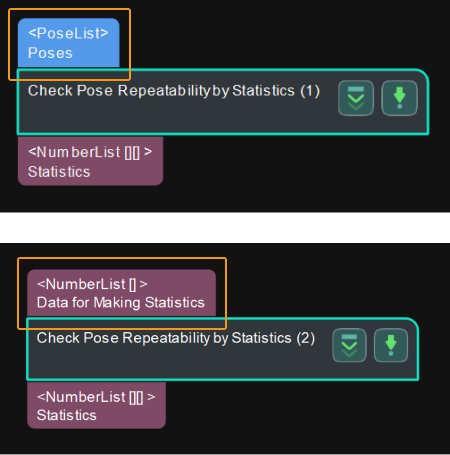
Type de données d’entrée
Comme indiqué ci-dessous, lorsque différents Types de données d’entrée sont sélectionnés, le port d’entrée de l’Étape change en conséquence.
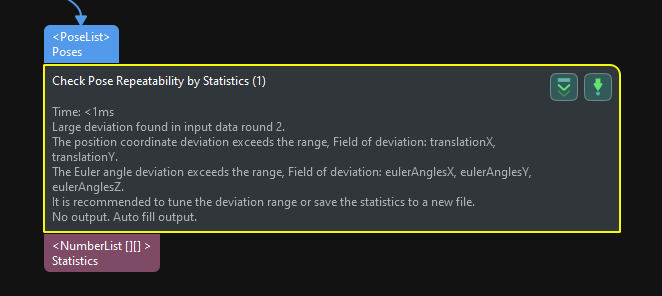
Plage de déviation des coordonnées de position/angles d’Euler
Lorsque la différence entre l’ensemble de données actuel et le dernier ensemble de données dépasse la valeur définie, un message d’erreur comme illustré ci-dessous apparaît sur l’Étape.
Redémarrer
Lorsque Redémarrer est sélectionné, les données collectées après la marque « Restart » (y compris les données portant la marque Restart) seront incluses dans le calcul, tandis que les données collectées avant la marque « Restart » seront exclues et affichées en gris dans le fichier de statistiques.
Gestion des valeurs aberrantes
Raise Error on Outlier
Les trois types de messages d’erreur sont présentés ci-dessous :
-
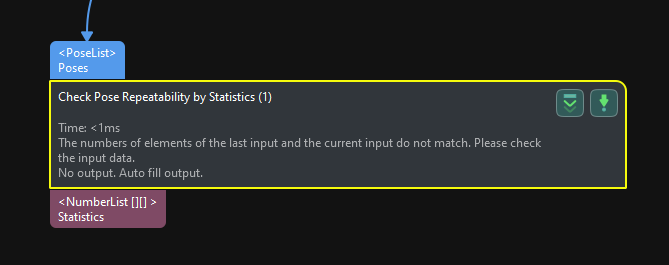
Le nombre d’éléments dans les données est incohérent.
-
La déviation des coordonnées de position ou la déviation des angles d’Euler dépasse le seuil défini.
-
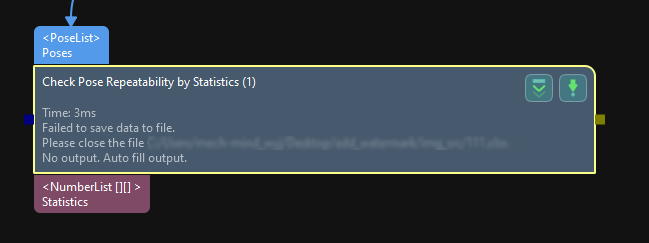
Le fichier de statistiques a été ouvert et les nouvelles données ne peuvent pas être enregistrées.
Record and Mark Outlier
Lorsque cette option est sélectionnée, les valeurs aberrantes (1 sur la figure ci-dessous) et les statistiques correspondantes (2 sur la figure ci-dessous) seront marquées en rouge.
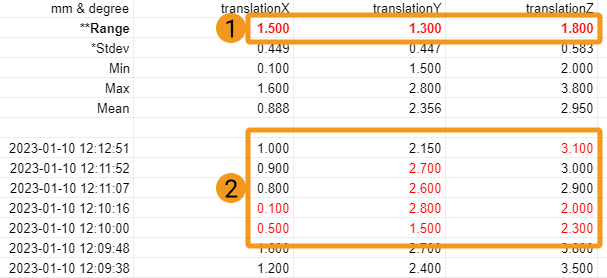
Comme indiqué ci-dessus, la colonne « Range » du tableau montre la répétabilité de la pose de l’objet cible à cette position fixe :
-
L’étendue d’erreur des coordonnées de l’axe X est d’environ ±1,500 mm.
-
L’étendue d’erreur des coordonnées de l’axe Y est d’environ ±1,300 mm.
-
L’étendue d’erreur des coordonnées de l’axe Z est d’environ ±1,800 mm.