Définir la translation de la pose
|
Le contenu de cette étape est en cours de maintenance. Si vous avez besoin d’informations supplémentaires sur cette étape de toute urgence, veuillez visiter Communauté en ligne de Mech-Mind. |
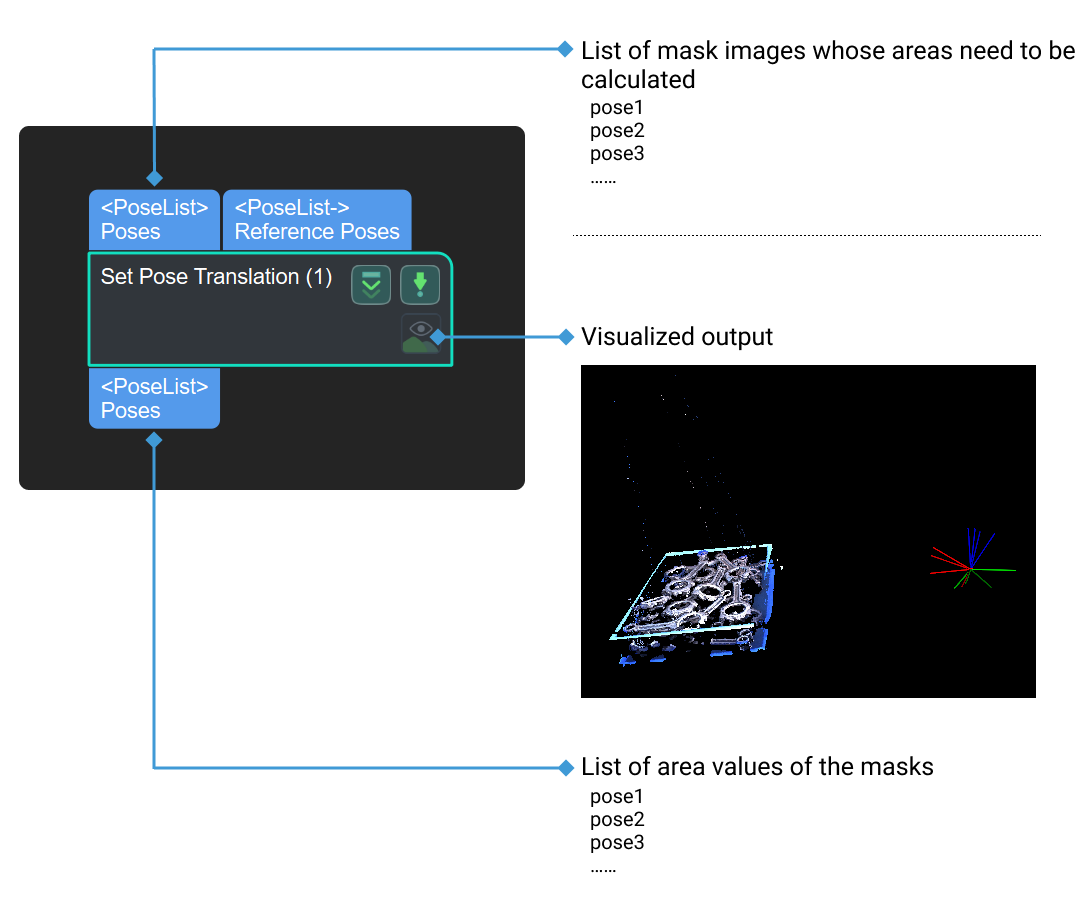
Fonction
Définir les vecteurs de translation des poses d’entrée. Les vecteurs de translation peuvent provenir soit des poses de référence d’entrée, soit du paramètre Reference Direction.
Scénario d’utilisation
Une étape générique de paramétrage du vecteur de translation de pose. Si la liste de poses de référence d’entrée contient plusieurs poses, seul le vecteur de translation de la première pose sera utilisé.