Calculer les normales et estimer les arêtes du nuage de points
Fonction
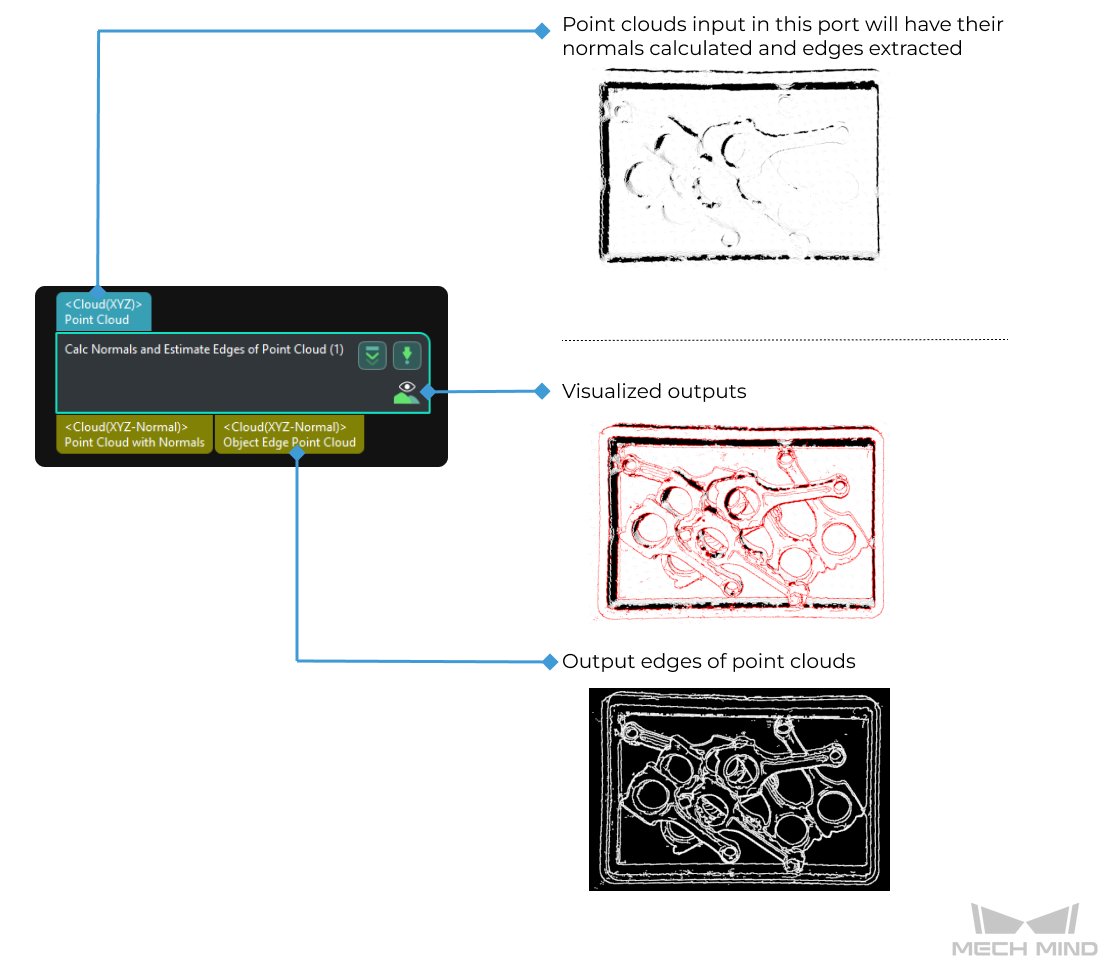
Cette Étape sert à calculer les normales du nuage de points et à produire le nuage de points d’arêtes en se fondant sur l’estimation des arêtes du nuage de points de l’objet.
L’Étape convertit d’abord le nuage de points d’entrée en carte de profondeur, puis détermine quels points sont des points d’arête en fonction des normales du nuage de points et des informations de profondeur.
Scénario d’utilisation
Cette Étape est généralement utilisée pour détecter les caractéristiques d’arête dans des scénarios de mesure en vue d’une mise en correspondance des arêtes ultérieure.
Description des paramètres
- Traiter un nuage de points non organisé
-
Description du paramètre: Ce paramètre permet de déterminer s’il faut traiter le nuage de points non organisé.
Valeur par défaut: Non sélectionné (applicable à la plupart des cas).
Recommandation de réglage: Si le nuage de points d’entrée est un nuage de points organisé, il n’est pas nécessaire de sélectionner cette option; si le nuage de points d’entrée est un nuage de points non organisé, veuillez sélectionner cette option. Une fois cette option sélectionnée, vous devrez définir Résolution de la carte de profondeur, tandis que Rayon de recherche et Demi-taille du noyau n’auront plus besoin d’être définis.
Paramètres de calcul des normales
- Profondeur minimale valide pour les points
-
Description du paramètre: Ce paramètre spécifie la valeur minimale (unité: mm) de la coordonnée Z pour calculer les normales. Lorsque la coordonnée Z du point est inférieure à la valeur du paramètre, le point sera filtré.
Valeur par défaut: 100 mm
- Rayon de recherche
-
Description du paramètre: Pour le traitement du nuage de points, les points à l’intérieur d’un cercle dont le rayon est la valeur du paramètre Rayon de recherche seront utilisés pour calculer les normales. L’unité est le millimètre.
Valeur par défaut: 10 mm
- Demi-taille du noyau
-
Description du paramètre: Pour le traitement de la carte de profondeur, les points situés dans un carré dont la longueur de côté est le double de la valeur de la demi-taille du noyau seront utilisés pour calculer les normales. L’unité est le pixel.
Valeur par défaut: 2 px
Paramètres de calcul des arêtes
Cette phase propose trois méthodes pour estimer les points d’arête:
-
Estimer les points d’arête sur la base du seuil de variation des normales.
-
Estimer les points d’arête sur la base du seuil de différence de profondeur.
-
Estimer les points d’arête sur la base de l’angle maximal entre la normale et l’axe Z.
Dans le processus de détermination des points d’arête, l’Étape identifie d’abord les points non d’arête selon le paramètre Angle maximal entre la normale et l’axe Z, puis utilise les paramètres Seuil de variation des normales et Seuil de différence de profondeur pour déterminer les points d’arête parmi les points restants. Un point d’arête doit satisfaire simultanément les critères des paramètres Seuil de variation des normales et Seuil de différence de profondeur.
- Seuil de variation des normales
-
Description du paramètre: Ce paramètre permet de spécifier le seuil de variation des normales utilisé pour déterminer le point d’arête, l’unité étant le degré (°). Un point est un point d’arête si la variation des normales de ses voisins est supérieure à ce seuil. La variation des normales est une valeur synthétique prenant en compte la variation des normales des points adjacents.
Valeur par défaut: 10°
- Seuil de différence de profondeur
-
Description du paramètre: Ce paramètre sert à spécifier la limite supérieure de la différence de profondeur (unité: mm) lors de la détermination du point d’arête. Un point est un point d’arête si la différence de profondeur maximale entre le point et ses huit points adjacents est supérieure à ce seuil.
Valeur par défaut: 5 mm
- Angle maximal entre la normale et l’axe Z
-
Description du paramètre: Ce paramètre sert à spécifier l’angle maximal (°) entre l’axe Z du point et la normale. Lorsque l’angle entre l’axe Z du point et la normale est supérieur à cette valeur, le point ne sera pas considéré comme un point d’arête.
Valeur par défaut: 70° (applicable à la plupart des cas).
Paramètres de filtrage des arêtes
- Largeur tolérée de la lacune
-
Description du paramètre: S’il existe une lacune dans le nuage de points, ce paramètre sert à déterminer si les extrémités de la lacune sont des arêtes. L’unité est le pixel (px). Si la largeur de la lacune est inférieure à cette valeur et que la différence de hauteur entre les deux extrémités de la lacune est inférieure au Seuil de différence de profondeur, les deux extrémités de la lacune ne seront pas considérées comme des arêtes.
Valeur par défaut: 2 px
- Nombre minimal de points d’arête
-
Description du paramètre: Ce paramètre sert à spécifier le nombre minimal de points dans le nuage de points d’arêtes en sortie. Les parties du nuage de points d’arêtes comportant moins de points que la valeur définie seront ignorées.
Valeur par défaut: 10