Sélectionner le processus d’étalonnage main-œil approprié
L’étalonnage main-œil établit la relation de transformation entre les repères de la caméra et du robot. Grâce à cette relation, la pose de l’objet déterminée par le système de vision peut être transformée dans le repère du robot, ce qui guide le robot pour exécuter ses tâches. La précision des résultats de l’étalonnage main-œil affecte la précision de la préhension du robot.
Après la construction du système de vision Mech-Mind, vous pouvez démarrer l’étalonnage main-œil. De plus, vous devez effectuer à nouveau l’étalonnage main-œil dans l’un des cas suivants:
-
La caméra se déplace par rapport à la base du robot (en configuration œil-à-main) ou à la bride (en configuration œil-dans-la-main).
-
La caméra est remplacée.
-
Le robot est remplacé.
-
L’environnement de travail ou l’agencement du robot change.
-
L’exigence de précision de la préhension augmente.
-
Une collision ou un mouvement entraîne des changements de position du robot ou de la caméra.
-
Des problèmes de préhension imprécise surviennent et les erreurs des paramètres extrinsèques augmentent.
-
Les paramètres intrinsèques de la caméra ont été corrigés.
-
L’application fonctionne pendant une longue période (pour garantir la stabilité du système, il est nécessaire d’effectuer périodiquement à nouveau l’étalonnage main-œil).
Sélectionner le processus d’étalonnage approprié
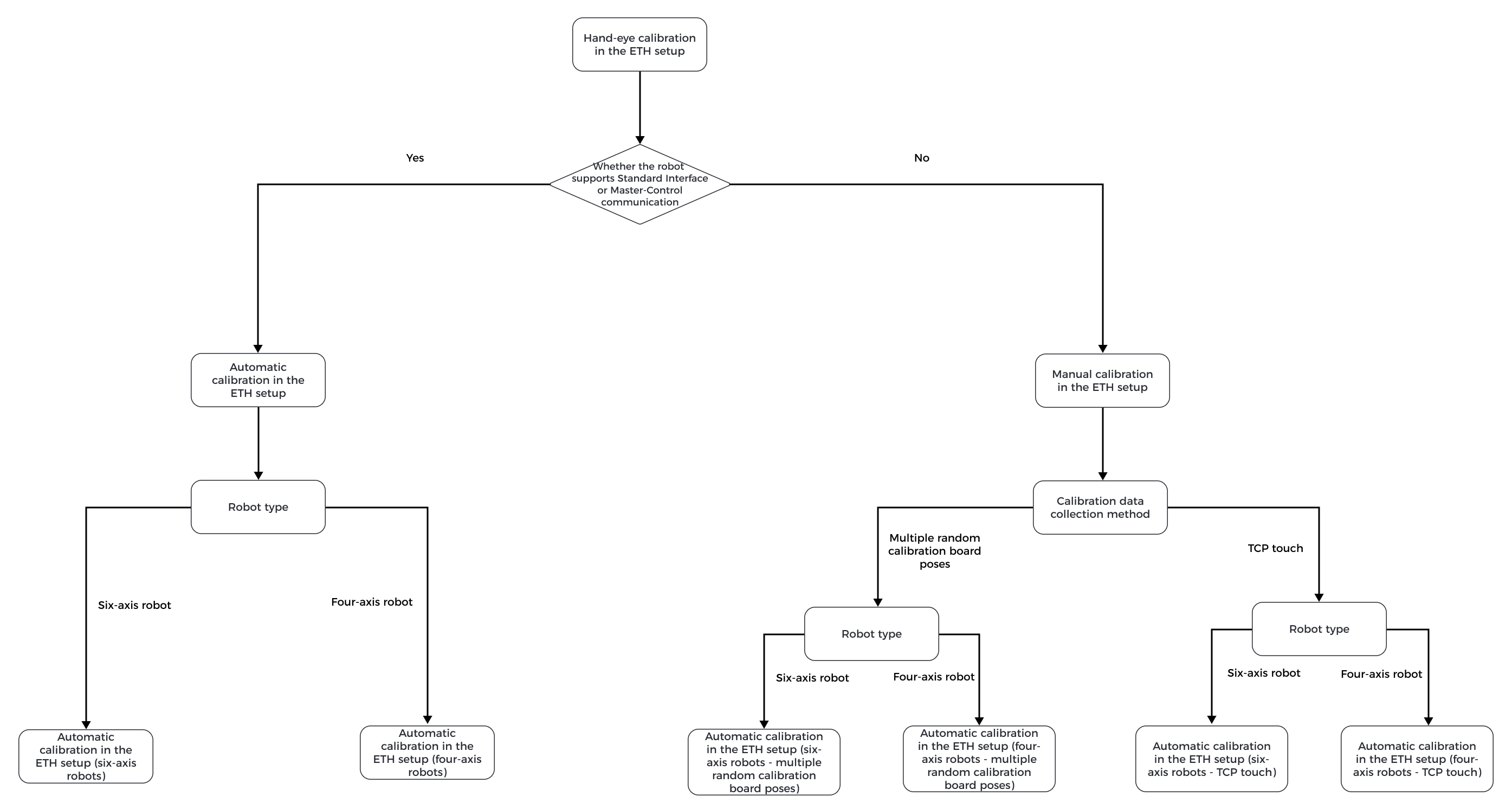
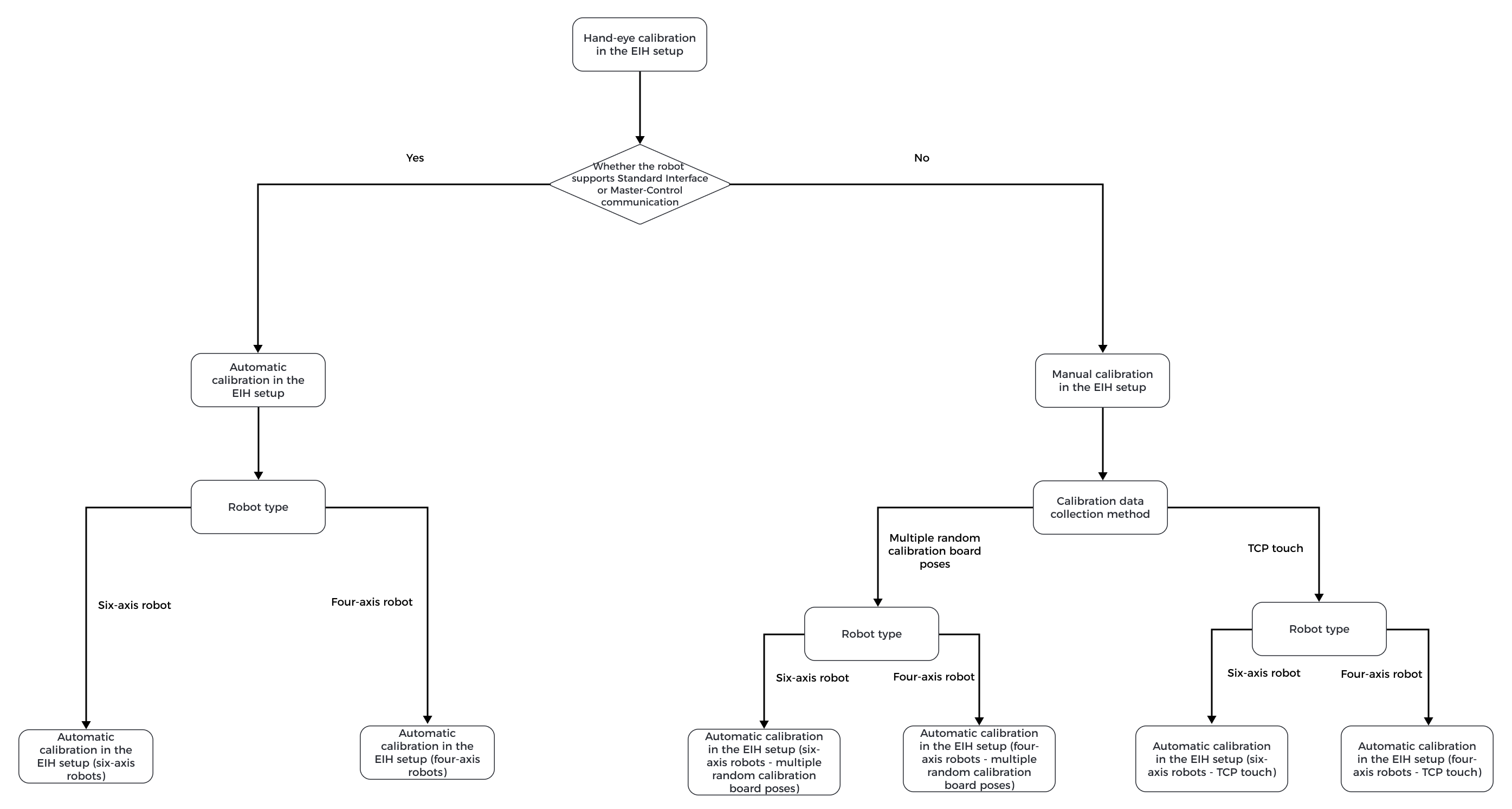
Les procédures d’étalonnage sont influencées par les modes de communication du robot, les modes de montage de la caméra, les modes d’étalonnage et les méthodes de collecte des données d’étalonnage.Mech-Vision fournit des procédures d’étalonnage standardisées pour divers scénarios, vous aidant à étalonner rapidement et avec précision les paramètres intrinsèques et extrinsèques de la caméra.
|
Pour des explications sur les modes de communication du robot, les modes de montage de la caméra, les modes d’étalonnage et les méthodes de collecte des données d’étalonnage, reportez-vous à la section Concepts liés à l’étalonnage. |
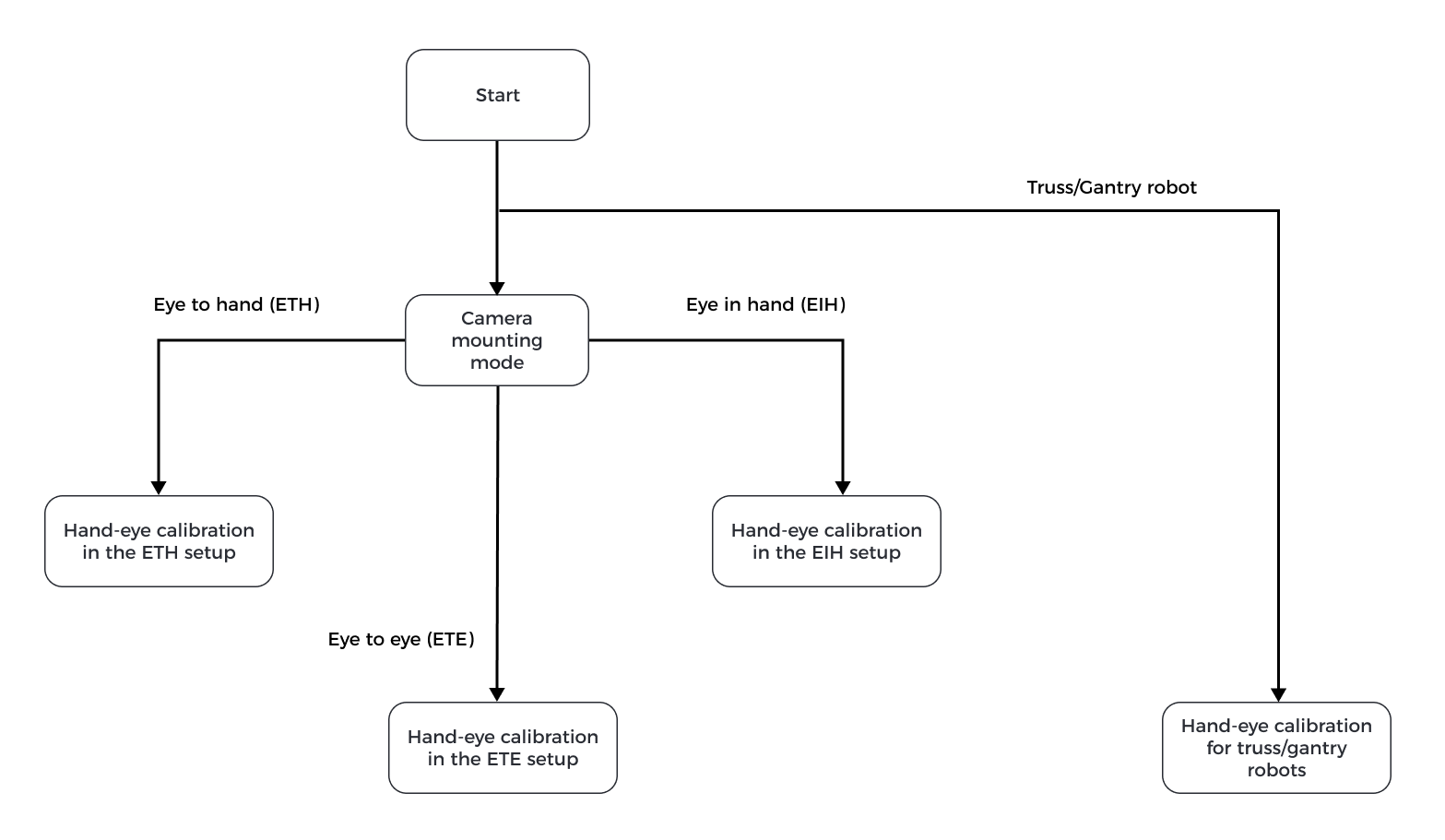
Veuillez sélectionner les processus d’étalonnage en fonction des modes de montage de la caméra.
-
Si le mode de montage de la caméra est œil-à-main (ETH), accédez à Étalonnage main-œil dans la configuration ETH pour une sélection ultérieure.
-
Si le mode de montage de la caméra est œil-à-main (ETH), accédez à Étalonnage main-œil dans la configuration EIH pour une sélection ultérieure.
-
Si le mode de montage de la caméra est œil-à-œil (ETE), suivez le processus de Étalonnage main-œil dans la configuration ETE.
| Si un robot portique est utilisé dans un projet, suivez le processus de Étalonnage main-œil pour robots portiques. |