Transformer les nuages de points pour le portique
Fonction
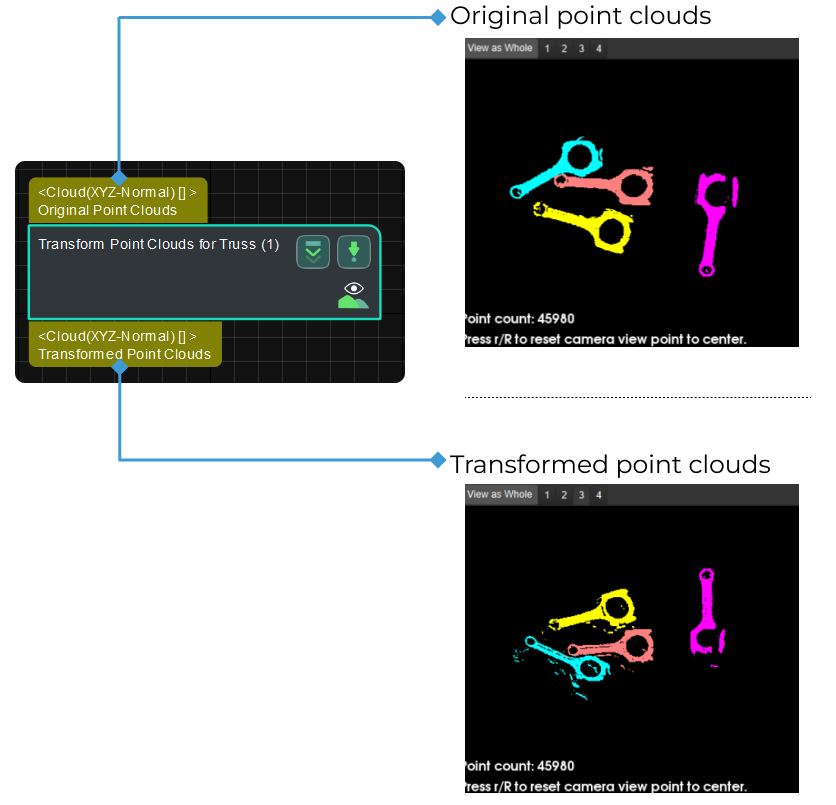
Cette Étape est utilisée pour transformer les nuages de points en entrée vers le repère de la caméra ou le repère du système de portique, puis pour renvoyer les nuages de points transformés.
Scénario d’utilisation
Cette Étape est conçue pour transformer le repère des nuages de points dans des projets de système de portique automatisé.
|
Si vous utilisez un robot autre que le système de portique automatisé, veuillez utiliser l’Étape Transformer les nuages de points. Si vous utilisez la mauvaise Étape de transformation, la position du nuage de points après la transformation sera incorrecte, et par conséquent des points de préhension incorrects seront produits. |
Description des paramètres
- Type de transformation
-
Description du paramètre: Ce paramètre est utilisé pour sélectionner le type de transformation du nuage de points.
Options: CameraToRobot, RobotToCamera.
-
CameraToRobot: Transformer les nuages de points du repère de la caméra vers le repère du système de portique. Veuillez vous référer à exemple de réglage pour le résultat correspondant.
-
RobotToCamera: Transformer les nuages de points du repère du système de portique vers le repère de la caméra. Veuillez vous référer à exemple de réglage pour le résultat correspondant.
Paramètre par défaut: CameraToRobot.
-