Paramètres généraux
Après la reconnaissance de l’objet cible, vous pouvez configurer des fonctions auxiliaires autres que la reconnaissance visuelle. Seule la configuration des sorties de ports est prise en charge.
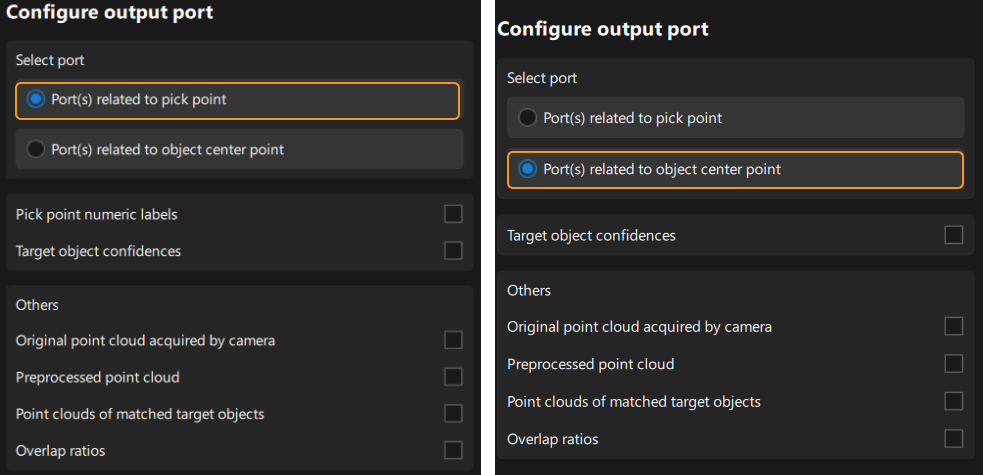
Configurer le port de sortie
Sélectionnez les ports de sortie en fonction de la situation réelle de l’objet cible.
-
Sélectionnez le type de port de sortie.
-
Port(s) liés au point de préhension: Convient aux objets cibles comportant plusieurs points de préhension devant être filtrés.
-
Port(s) liés au point central de l’objet: Convient aux objets cibles symétriques nécessitant un ajustement de l’orientation du point central de l’objet.
-
-
Sélectionnez les ports de sortie spécifiques.
Après avoir sélectionné le type de port de sortie, vous pouvez choisir des ports de sortie spécifiques en fonction des besoins réels.
Pour d’autres ports de sortie, sélectionnez pour les ajouter en temps réel à l’étape « Reconnaissance de l’objet cible 3D ».
-
La sélection de « Nuage de points original acquis par la caméra » renvoie le nuage de points coloré transformé. Cette option peut être activée en fonction des besoins réels.
-
La sélection de « Nuage de points prétraité » fournit des données de nuage de points prêtes à être utilisées directement dans les Étapes suivantes (par exemple, reconnaissance de bac), évitant un traitement redondant.
-
La sélection de « Nuages de points des objets cibles appariés » fournit des données pour la compensation de décalage de pose ou des mécanismes ultérieurs de prévention des erreurs.
-
La sélection de « Taux de chevauchement » permet au système d’évaluer la confiance de reconnaissance et d’optimiser la séquence de prélèvement dans l’étape Ajuster les poses V2 en utilisant la méthode de tri par confiance de pose.
-
La sélection de « Résultat de visualisation de l’apprentissage profond » affiche la sortie d’inférence du modèle d’apprentissage profond.
-
|
Pour le port de sortie Résultat de visualisation de l’apprentissage profond, vous pouvez le sélectionner après avoir activé Assister la reconnaissance par apprentissage profond. Assurez-vous de cliquer sur le bouton Enregistrer après avoir sélectionné le port ; sinon, le port ne sera pas ajouté à l’étape « Reconnaissance de l’objet cible 3D ». |